本文为美国阿肯色大学(作者:ZacharyR. Sabey)的学士论文,共44页。
如今,许多工业和商业应用开始使用无人系统来提高生产力,并降低生产和人力成本。这些应用中的大多数产品都是半无人化的,它们仍然需要人类来启动或接收连续的指令。随着图像处理技术、摄像机处理能力和更高效的车辆改进,已经可以实现新一代的无人驾驶车辆。本文开发了一种连接到RC车辆的基于专用图像处理器的简单系统,以便为当前可行的新技术提供示例。
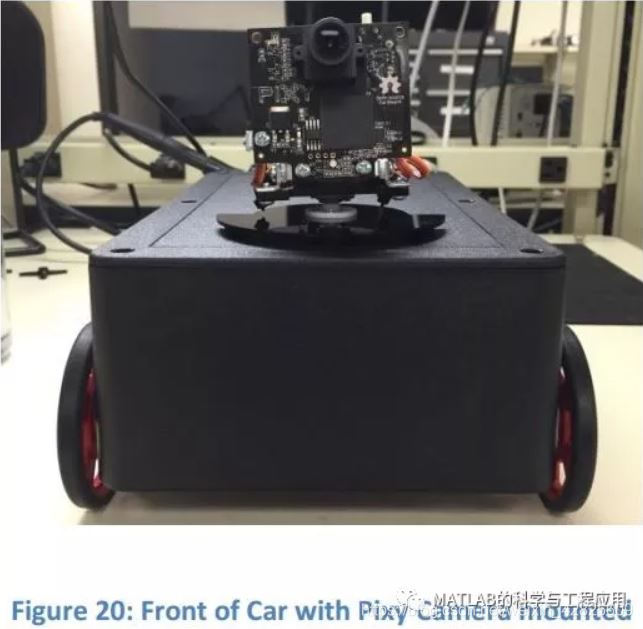
Pixycam是一种专用的彩色色调图像处理摄像机,可用于允许RC车辆自主跟踪彩色物体。实验结果表明,利用Pixycam和RC车辆相结合可以成功地跟踪明亮环境下的彩色物体。为了验证该系统及其不同的性能,使用MATLAB和Pixymon对摄像机的图像处理能力进行了仿真和比较,然后在平坦面上通过运动车辆使用最终设计的系统和彩色物体来测试系统的响应能力。
Many industrial and commercial applicationstoday are beginning to use autonomous systems to increase productivity and cutcosts in production and manpower. Most of these applications are onlysemi-autonomous; they still need assistance from a human to either start up orreceive continual instructions. With the improvement of image processingtechniques, camera processing capabilities and more efficient vehicles, a newwave of fully autonomous vehicles can be implemented. A simple system that usesa dedicated image processor connected to an RC vehicle can be developed toprovide an example for the new techniques currently available. The Pixycam, adedicated color-hue image processing camera, can be used to allow an RC vehicleto track colored objects autonomously. The results of this system show that thecombination of the Pixycam and an RC vehicle can be used to successfully trackand follow colored objects in well-lit environments. In order to demonstratethis system and its different capabilities, MATLAB and Pixymon were used tosimulate and compare the image processing power of the camera. The final systemand colored objects were then used to move the vehicle around on a flat surfacetesting the responsiveness of the system.
1 引言
2 项目背景
3 MATLAB/SIMULINK仿真
4 系统物理实现
5 结论
附录A 参考文献
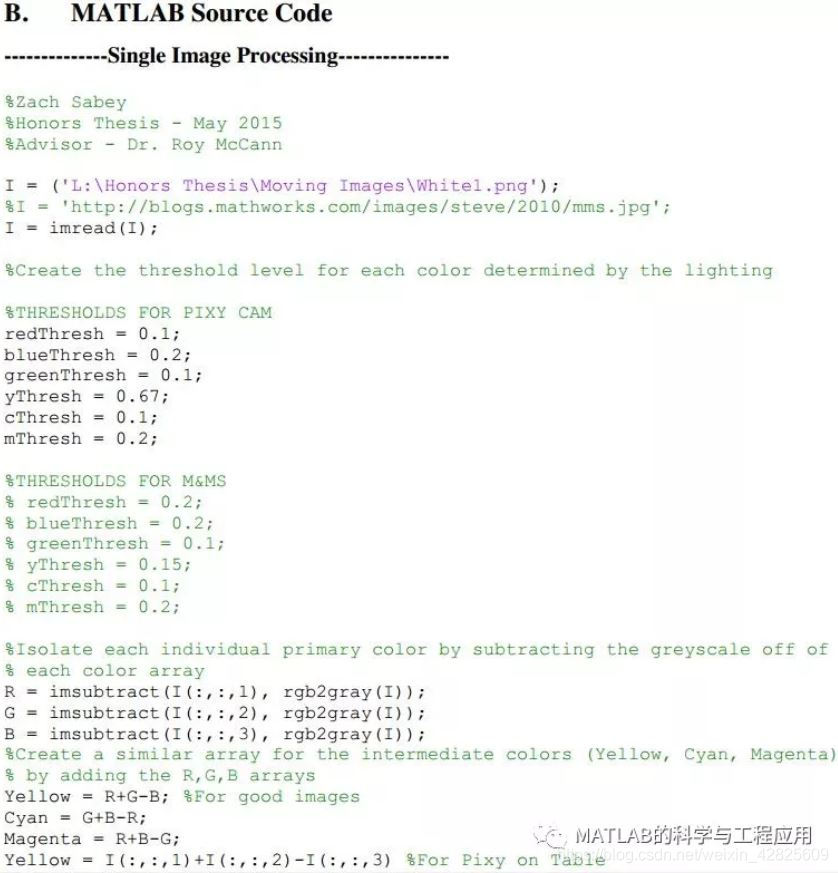
附录B MATLAB源代码
附录C PIC 18f2420的MPLAB代码
下载英文原文地址:
http://page5.dfpan.com/fs/1lccj2a21229b161a97/
更多精彩文章请关注微信号: