无人驾驶最主要的几方面:
高精度地图、定位、感知、预测、规划、控制
普通的导航电子地图是面向驾驶员使用,而高精度地图是自动驾驶汽车使用。
高精地图,拥有精确的车辆位置信息和丰富的道路元素数据信息,起到构建类似于人脑对于空间的整体记忆与认知的功能,可以帮助汽车预知路面复杂信息,如坡度、曲率、航向等,更好地规避潜在的风险。是实现自动驾驶的关键所在。
摄像头、激光雷达、传感器所监测到的范围是有限的。摄像头根据不同的俯角看到的距离约150米-60米不等,激光雷达所看到的范围大约40米-80米范围。 高精度地图可以精确自动识别交通标志、地面标志、车道线、信号灯等上百种目标,还有道路坡度、曲率等准确的数据信息。
高精地图是对现实世界几乎路上的所有物体的三维的重建,因此精细化程度最高。高精地图在数据处理方面分为动态和静态,动态数据由实时路况层、交通事件层组成,静态数据则包括数据更新层、交通设施层、车道层、道路层的数据。相比较普通地图而言,高精地图增加了大量的几何信息、车道信息、交通标志信息。整个属性从40多种变成两三百种,相对精度达0.1-0.2米,实现了精细化程度最高。

高精度地图在定位时可以于传感器中融合的内容进行匹配,进而确定自己的位置,GPS1-3米的误差时不能接受的。
Apollo高精地图主要包括:
- 道路定义 (地图道路)
- 交叉路口 (记住交叉路口的地物信息等)
- 交通信号 (记住交通灯的位置,计算高度等)
- 车道规则 (记住当前路段的车道规则)
处理高精地图外还有俯视图、相对定位图、三维点云地图来作为辅助
Apollo构造过程: 采集、处理、检测、验证、发布
- 数据采集 车辆采集、众包等
ADAS (高德)车顶安装有 6 个 CCD 摄像头。其中 5 个摄像头以圆形环绕,顶部一个单独的摄像头,每个像素都是 500 万,总计 3000 万像素。车内副驾驶的位置有用于采集数据的显示屏,机箱在后备箱位置,用于储存和处理数据。
顶部则是通过装配 2 个激光雷达(位于后方)和 4 个摄像头(两前两后)的方式来满足所需要的 10cm 级别精度。两种方案搭配,能够完成标牌、障碍物、车道线等道路信息的三维模型搭建。

- 数据处理 数据分类、数据清洗、数据融合(不同传感器)
- 目标检测 radar、lidar、image。。
- 手动验证 验证、标记、编辑地图
- 地图发布 OpenDRIVE 格式的地图数据、考虑坐标系、
包括高精地图、俯视图、相对定位图、三维点云地图等。
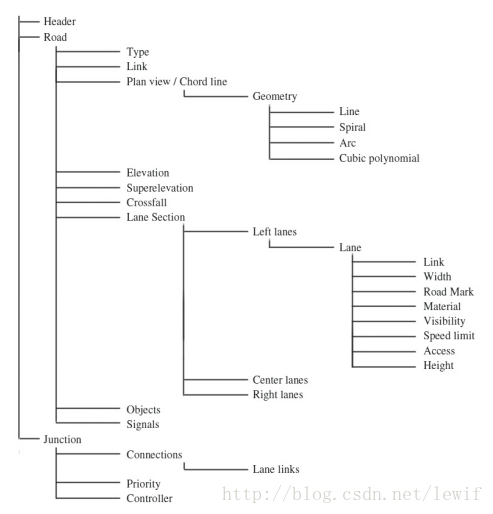
OpenDRIVE 格式就像API一样,每个人可以轻松读取相同的地图数据
在绘制时大多数为自动化绘制