线性时不变系统
本文引自《数字信号处理 【美】 Richad G. Lyons》
众所周知,LTI系统官方定义。
线性系统的例子:
假设
y(n)= - x(n) / 2
输出序列是输入序列取反后的1/2
输入x1 : 1Hz -------------------输出: 峰值为振幅-0.5,频率1Hz的单频信号
输入x2 : 3Hz -------------------输出:峰值为振幅-0.5,频率3Hz的单频信号
输出之和: 1HZ处 和3HZ处
如果输入以上两个单频信号之和 x1+x2 ,输出同样是在1HZ处和3Hz处
说明以上系统为线性系统
‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’
重点:
非线性系统的例子
例子:
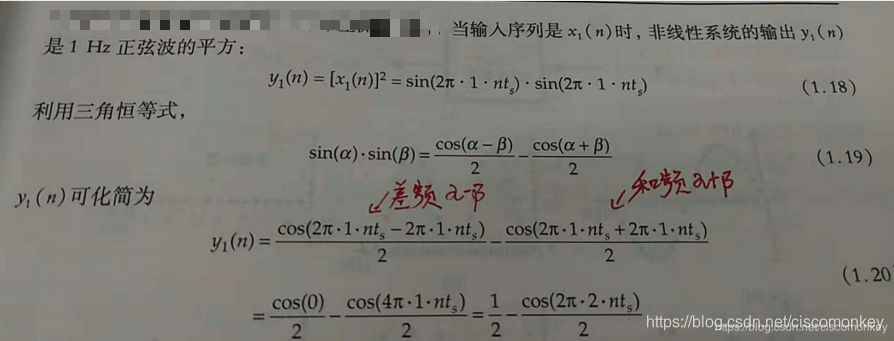
y(n)=[x(n)]^2
当输入由简单的正弦波组成时,使用注明的三角恒等式及一点代数知识来计算非线性系统的输出
输入: x1(n)=sin(2 pi f0 n Ts)
可以看出,两个正弦曲线相乘,会产生和频(α+β),及差频率(α-β),所以常数1/2称为0Hz的频率分量,以及2HZ
3HZ的正弦序列通过这个非线性系统时候,通过代数运算,会输出一个0HZ和6HZ的频率分量
将1HZ和3HZ的正弦波之和,输入到该系统:
(a+b)2
=a2+2ab+b2
其中同样利用知名的三角公式,2ab会差生额外的2HZ和4HZ的正弦波
所以,当两个正弦波之和输入到非线性系统时,输出将包含两个正弦波单独输入时所没有的正弦分量。
这些额外的正弦分量是由于两个输入的正弦波在进行平方运算时候,相互作用产生的,这就是非线性
‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’
重点:
时不变系统‘
在一个时不变系统中,输入序列的延迟(或移位),将会在系统的输出序列中产生一个相同的延迟。
有些研究人员主张把一个时不变系统定义为其参数不随时间而改变的系统,这个定义是不完整的。并且如果不注意,这将可能给我们带来麻烦。
我们只需要记住下面这个正式的定义:
在一个时不变系统中,输入序列的延迟将会在系统的输出序列中产生一个相同的延迟。
’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’‘’
LTI系统的可交换性
将两个不同的LTI系统相串联,交换这两个串联系统的顺序并不会改变最终的输出。尽管中间值序列f(n),与g(n)通常情况下并不相同,但是两组LTI系统将拥有完全一样的输出序列y(n)
重点:
分析LTI系统
如果要直到一个LTI系统的单位脉冲响应,就可以计算这个系统里面所有我们想要知道的东西,也就是说,系统的单位脉冲响应完全表征了一个系统。所谓“单位脉冲响应”,指的是当输入单位脉冲时,系统所对应的时域输出序列。
由于输出等于输入序列与系统脉冲响应的卷积,因此已知一个LTI系统的(单位)脉冲响应之后,就可以确定任意输出序列所对应的输出。此外,已知一个LTI系统的时域脉冲响应,通过对该脉冲响应进行离散傅里叶变换,就可以求出这个系统的频率响应。
请深刻理解上面两句话,其中蕴含了数字信号处理中最重要的原则!
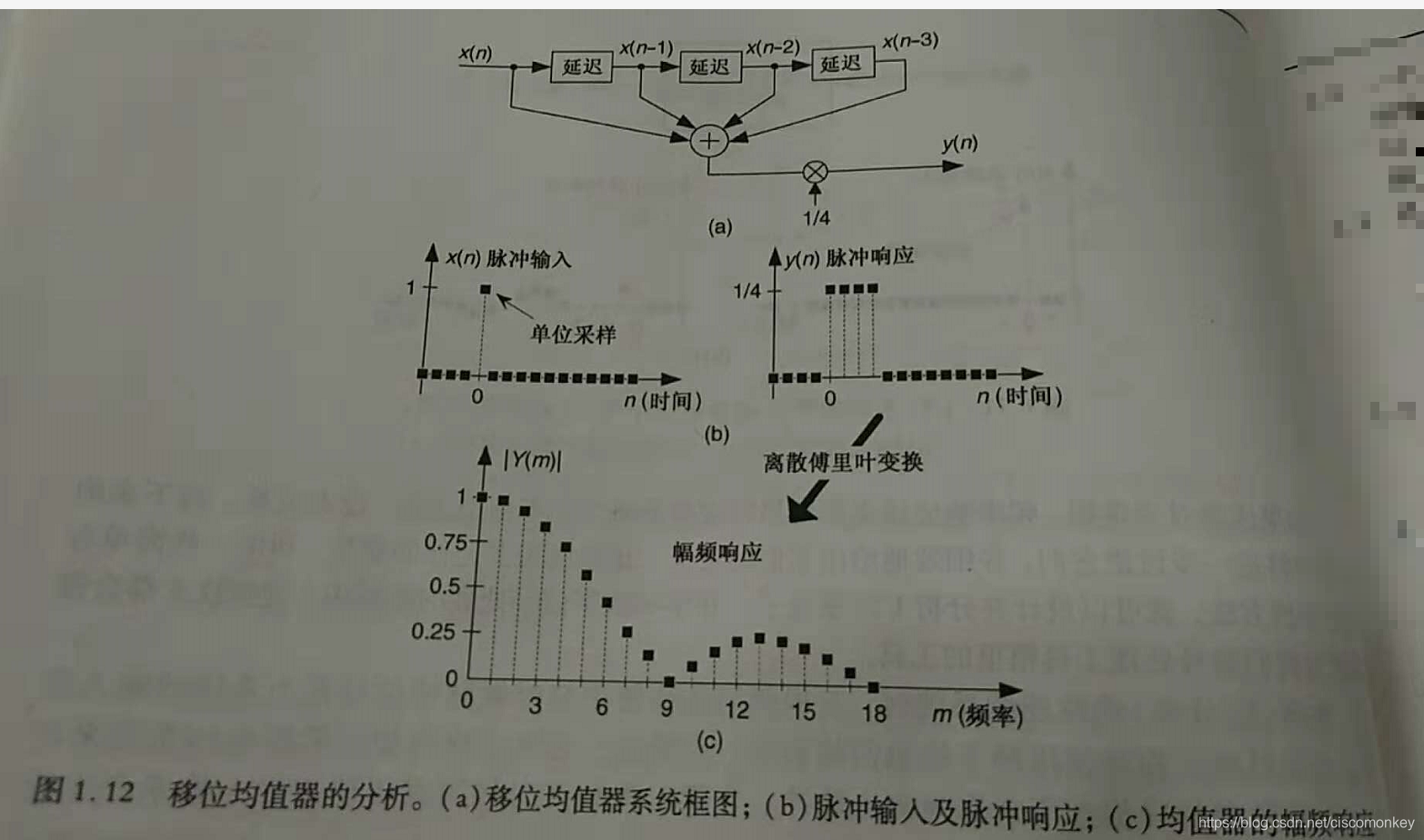
4点移位均值器。
一个移位均值器,就相当于一个数字低通滤波器(说白了,就是把频率放慢,变化速度放慢了)