
PCL(PointCloudLibrary)其实就是一个开源的c++代码库,它实现了大量点云相关的通用算法和高效的数据管理结构,不仅涉及逆向工程领域,其还在模式识别,机器人视觉,计算机图形学,虚拟现实等众多领域大显神威。基于以下第三方库:Boost,Eigen,FlANN,VTK,OpenNI,QHull,实现了点云获取,滤波,分割,精简,配准,特征提取......
we split PCL into a series of modular libraries. The most important set of released modules in PCL is shown below.
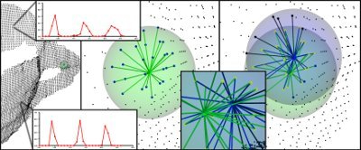
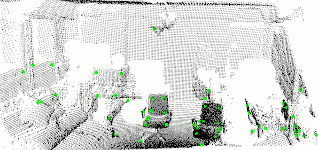
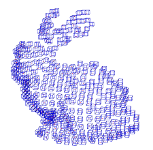
| filters | features | keypoints |
 |
 |
 |
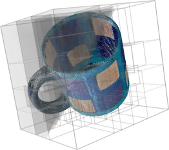
| registration | kdtree | octree |
 |
 |
 |
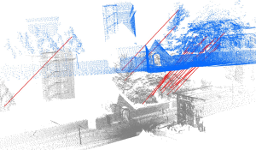
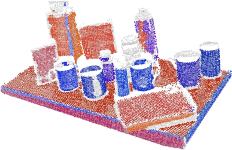
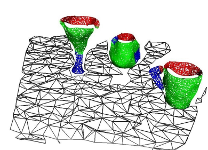
| segmentation | sample_consensus | surface |
 |
 |
 |
| recognition | io | visualization |
 |
 |
 |