##Libev源代码结构 对于毕业生,尤其是没有接触过一些已有工程代码的新人。拿到一份源码,怎么去熟悉它是首要解决的问题。我一般把会把源码进行分类:一类是产品类的,就比如Redis、Ngnix这一类本身是一个完整的可以运维的成熟产品;另一类就是Libev这样的组件类的。对于组件类的项目,我一般就是分成这样几步:
- 有文档看文档,没有文档问相关人员(包括Google),这个组件主要提供什么服务
- 结合上述信息使用组件的AIP写个示例程序,跑起来
- 大致浏览下源码,分析一下代码的组织结构
- 根据使用的API,进到源码中看看主干是怎么样实现的,从而了解整体思路
- 再搜刮源码,把一些辅助的功能看下,并在例子中尝试
- 之后将整个理解用文字记录下来。提炼两大块内容:实现思想和技巧tips
这里我对Libev的学习就是依照这样的一个逻辑一步一步走的。
ev.c代码结构
在“使用Libev” 这篇文章中提到了一个Libev的官方文档,并根据该文档写了个简单的示例,包括了IO事件、定时器事件以及信号事件这3个最常用的事件类型。在本篇文章中将对Libev的代码结构进行分析。
首先下载Libev的源码包,下载回来后进行解压,Libev的源码都放在同一个目录中,除去autoconfig产生的文件,代码文件还是比较直观的。主要的.c和.h文件从命名上也查不多能猜出来干嘛呢。根据我们的例子,主要抽出其中的"ev.c ev_epoll.c ev_select.c ev.h ev_wrap.c ev_vars.c"结合我们的例子进行梳理。
"ev_epoll.c"和"ev_select.c"是对系统提供的IO复用机制“epoll”、"select"的支持,还有"poll"、"kqueue" Solaris的"port"的支持,分别是"ev_poll.c"、"ev_kqueue.c"、"ev_port.c"。具体的框架是类似的,因此只要分析一个其他的就都了解了。
"ev.h" 是对一些API和变量、常量的定义,"ev.c"是Libev的主要逻辑,其中在类型的定义的时候用了一个宏的包装来声明成员变量,在文件"ev_vars.c" 中。为了对成员变量使用的语句进行简化,就又写了一个"ev_wrap.c"。因此我们可以这样去看待这些文件,主要逻辑都在"ev.c",其中部分常量、变量的定义可以在"ev.h"中,有个结构的成员变量部分的定义在"ev_vars.c"中,同时对该结构成员变量的引用通过"ev_wrap.c"文件做了个简写的宏定义;当需要系统提供底层的事件接口时,按分类分别在"ev_epoll.c"、"ev_select.c"等文件中。
接着打开"ev.c"文件,"ev.h"里面的各种定义,在需要的时候去查询即可,通过IDE或者Vim/Emacs结合cscope/ctag都可以很好的解决。通过浏览可以发现这些代码大概可以分成三部分:
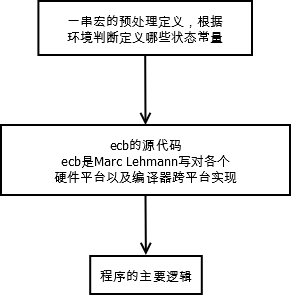
因此可以直接跳到代码部分。分隔点有ecb结束的注释。这可以不用担心略过的部分,等需要的时候回过去查阅即可。其中ecb的部分,只要知道其API作用即可,无需深究,如果未来需要的时候可以到这边来做一个参考。
对于逻辑结构可以可以把他分成几个部分: 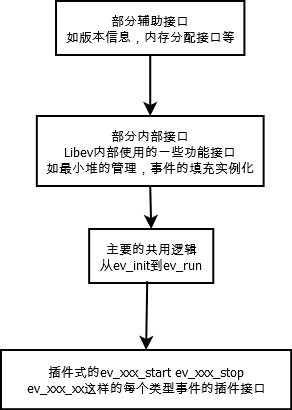
这样对整体的布局有个大概的了解,就可以有选择性的逐个突破了。这里还可以结合官方的文档去了解下每个函数作用。从而对Libev的整体提供的服务有个大概的了解。
主要数据结构
浏览的过程中梳理下几个重要的数据结构
1.时间类型
typedef double ev_tstamp;
####2.坑爹的 EV_XX_ Libev用ev_tstamp表示时间单位,其实质就是一个double类型变量。
struct ev_loop;
# define EV_P struct ev_loop *loop /* a loop as sole parameter in a declaration */
# define EV_P_ EV_P, /* a loop as first of multiple parameters */
# define EV_A loop /* a loop as sole argument to a function call */
# define EV_A_ EV_A, /* a loop as first of multiple arguments */
# define EV_DEFAULT_UC ev_default_loop_uc_ () /* the default loop, if initialised, as sole arg */
# define EV_DEFAULT_UC_ EV_DEFAULT_UC, /* the default loop as first of multiple arguments */
# define EV_DEFAULT ev_default_loop (0) /* the default loop as sole arg */
# define EV_DEFAULT_ EV_DEFAULT, /* the default loop as first of multiple arguments */
这里的定义还是比较让人无解的。"EV_XXX_" 等同于 EV_XXX,,这样在后续的API使用中,会显的更简洁一些,比如针对第一个参数是struct ev_loop *loop 的回调函数的书写,就可以写成 · void io_action(EV_P_ ev_io *io_w,int e)· 。这里不知道作者还有没有其他用以,这里我不是很推荐,但是要知道,后面再看代码的时候才更容易理解。
3.各种watcher
基类
首先看一个ev_watcher,这个我们可以用OO思想去理解他,他就相当于一个基类,后续的ev_io什么的都是派生自该机构,这里利用了编译器的一个“潜规则”就是变量的定义顺序与声明顺序一致。这一点在libuv里面也用了,然后大神云风哥还对其吐槽了一番,可以参见云风的blog。这里我尽量吧所有宏包裹的部分都拨出来,方便理解和看。看过Libev的代码,我想在惊叹其宏的高明之余一定也吐槽过。
typedef struct ev_watcher
{
int active;
int pending;
int priority;
void *data;
void (*cb)(struct ev_loop *loop, struct ev_watcher *w, int revents);
} ev_watcher;
与基类配套的还有个装监控器的List。
typedef struct ev_watcher_list
{
int active;
int pending;
int priority;
void *data;
void (*cb)(struct ev_loop *loop, struct ev_watcher_list *w, int revents);
struct ev_watcher_list *next;
} ev_watcher_list;
IO监控器
typedef struct ev_io
{
int active;
int pending;
int priority;
void *data;
void (*cb)(struct ev_loop *loop, struct ev_io *w, int revents);
struct ev_watcher_list *next;
int fd; /* 这里的fd,events就是派生类的私有成员,分别表示监听的文件fd和触发的事件(可读还是可写) */
int events;
} ev_io;
在这里,通过从宏中剥离出来后,可以看到将派生类的私有变量放在了共有部分的后面。这样,当使用C的指针强制转换后,一个指向 struct ev_io对象的基类 ev_watcher 的指针p就可以通过 p->active 访问到派生类中同样表示active的成员了。
定时器watcher
typedef struct ev_watcher_time
{
int active;
int pending;
int priority;
void *data;
void (*cb)(struct ev_loop *loop, struct ev_watcher_time *w, int revents);
ev_tstamp at; /* 这个at就是派生类中新的自有成员 ,表示的是at时间触发 */
} ev_watcher_time;
这里定时器事件watcher和IO的不一样的地方在于,对于定时器会用专门的最小堆去管理。而IO和信号等其他事件的监控器则是通过单链表挂起来的,因此他没有next成员。
信号watcher
typedef struct ev_signal
{
int active;
int pending;
int priority;
void *data;
void (*cb)(struct ev_loop *loop, struct ev_signal *w, int revents);
struct ev_watcher_list *next;
int signum; /* 这个signum就是派生类中新的自有成员 ,表示的是接收到的信号,和定时器中的at类似 */
} ev_signal;
还有其他的事件watcher的数据结构也是和这个类似的,可以对着"ev.h"的代码找一下,这里不再赘述了。最后看一个可以容纳所有监控器对象的类型:
union ev_any_watcher
{
struct ev_watcher w;
struct ev_watcher_list wl;
struct ev_io io;
struct ev_timer timer;
struct ev_periodic periodic;
struct ev_signal signal;
struct ev_child child;
struct ev_stat stat;
struct ev_idle idle;
struct ev_prepare prepare;
struct ev_check check;
struct ev_fork fork;
struct ev_cleanup cleanup;
struct ev_embed embed;
struct ev_async async;
};
4.最重要的 ev_loop
在上面就已经看到了 struct ev_loop 的前向声明了,那么他到底是怎样的一个结构的?在“ev.c”里面可以看到这样的定义:
struct ev_loop
{
ev_tstamp ev_rt_now;
#define ev_rt_now ((loop)->ev_rt_now)
#define VAR(name,decl) decl;
#include "ev_vars.h"
#undef VAR
};
#include "ev_wrap.h"
之前说过的 "ev_vars.h"和"ev_wrap.h"是为了定义一个数据结构及简化访问其成员的,就是说的这个 ev_loop 结构体。 这里用的宏为:
#define VAR(name,decl) decl;
#define VARx(type,name) VAR(name, type name)
展开就是
#define VARx(type,name) type name
然后再看"ev_vars.h" ,里面都是 类型-变量的 VARx的宏,这样再将其include 到结构体的定义中。这样就可以看成该结构定义为:
struct ev_loop
{
ev_tstamp ev_rt_now;
ev_tstamp now_floor;
int rfeedmax;
... .........;
}
不知道作者的用意何在,目前还没有看到这样做的好处在哪里。
然后 #define ev_rt_now ((loop)->ev_rt_now) 可以和后面的 "ev_warp.h"一起看。实际上就是 #define xxx ((loop)->xxx) 这样在要用struct ev_loop 的一个实例对象loop的成员时,就可以直接写成xxx了,这里再联想到之前的 EV_P EV_P_ EV_A EV_A_ ,就会发现,在Libev的内部函数中,这样的配套就可以使代码简洁不少。不过这样也增加了第一次阅读其的门槛。相信没有看过Libev不说其晦涩的。
5.重要的全局变量
default_loop_struct
在"ev.c"中有
static struct ev_loop default_loop_struct;
这个就是strct loop的一个实例对象,表示的是预制事件驱动器。如果在代码中使用的是预制事件驱动器,那么后续的操作就都围绕着这个数据结构展开了。
为了操作方便,还定义了指向该对象的一个全局指针:
struct ev_loop *ev_default_loop_ptr
代码的框架和主要的数据结构梳理出来了,还有ANFD、ANHEAP等数据结构在后面分析具体监控器是的时候在详细介绍。后面就要跟进程序的逻辑从而了解其设计思想,这样便可以深入的了解一款组件型的开源软件了。