SIFT在前面已经说过了,可以说在实现过程中是精益求精,用了各种手段来删除不符合条件的特征点,同时也得到了很好的效果但是实时性不高,于是就有了SURF(speeded up robusr features).SURF是一种尺度,旋转不变的detector和descriptor.最大的特点是快!在快的基础上保证性能(repeatability,distinctiveness和robustness)
1、总体概括
首先,先对SURF算法的中特征点的提取
在SURF算法中,特征点的判据为某像素亮度的Hessian矩阵的行列式(Dxx*Dyy-Dxy*Dxy)为一个极值。由于Hessian矩阵的计算需要用到偏导数的计算,这一般通过像素点亮度值与高斯核的某一方向偏导数卷积而成;在SURF算法里,为提高算法运行速度,在精度影响很小的情况下,用近似的盒状滤波器(0,1,1组成的box filter)代替高斯核。因为滤波器仅有0,-1,1,因此卷积的计算可以用积分图像(Integral image)来优化(O(1)的时间复杂度),大大提高了效率。每个点需计算Dxx,Dyy,Dxy三个值,故需要三个滤波器;用它们滤波后,得到一幅图像的响应图(Response image,其中每个像素的值为原图像素的Dxx*Dyy-Dxy*Dxy)。对图像用不同尺寸的滤波器进行滤波,得到同一图像在不同尺度的一系列响应图,构成一个金字塔(该金字塔无需像SIFT中的高斯一样进行降采样,即金字塔每组中的每层图像分辨率相同)。
特征点的检测与SIFT一致,即若某点的Dxx*Dyy-Dxy*Dxy大于其邻域的26个点(与SIFT一致)的Dxx*Dyy-Dxy*Dxy,则该点为特征点。特征点的亚像素精确定位与SIFT一致。
其次,描述子的建立。为保证特征点描述子的旋转不变性,需对每个特征点计算主方向。计算主方向的过程如下:
1. 统计以特征点为中心,正比于特征点尺度的某个数位半径,张角为60°的扇形区域内所有像素点的 sumX=(y方向小波变换响应)*(高斯函数),sumY=(x方向小波变换响应)*(高斯函数),计算合成向量角度θ=arctan(sumY/sumX),模长sqrt(sumy*sumy+sumx*sumx)。
2. 将扇形沿逆时针旋转(一般取步长为0.1个弧度),以同样方法计算合成向量。
3. 求出各方向扇形的合成向量模长最大值,其对应的角度即特征点主方向。
描述子的建立过程如下:
1. 选定以特征点为中心的一块正方形区域,将其旋转与主方向对齐。
2. 将正方形分为4x4的16个子区域,对每个区域进行Haar 小波变换(同样用积分图像加速),得到4个系数。
3. 由上述两步,生成4x4x4=64维向量,即描述子,用它可以进行匹配等工作。
算法的优点在于大量合理使用积分图像降低运输量,而且在运用的过程中并未降低精度(小波变换,Hessian矩阵行列式检测都是成熟有效的手段)。在时间上,SURF运行速度大约为SIFT的3倍;在质量上,SURF的鲁棒性很好,特征点识别率较SIFT高,在视角、光照、尺度变化等情形下,大体上都优于SIFT。
2、分开来说一、积分图
SURF是对积分图像进行操作,从而实现了加速,采用盒子滤波器计算每个像素点的Hessian矩阵行列式时,只需要几次加减法运算,而且运算量与盒子滤波器大小无关,所以能够快速的构成出SURF的尺度金字塔。
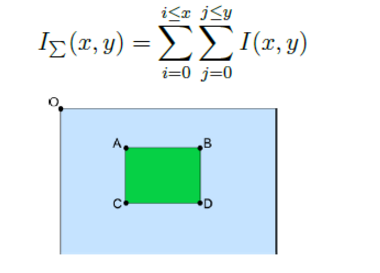
积分图像中每个像元的值,是原图像上对应位置的左上角所有元素之和
二、尺度空间的构造
2.1 DOH近似
SIFT算法建立一幅图像的金字塔,在每一层进行高斯滤波并求取图像差(DOG)进行特征点的提取,而SURF则用的是Hessian Matrix进行特征点的提取,所以黑森矩阵是SURF算法的核心。假设函数f(x,y),Hessian矩阵H是由函数偏导数组成。首先来看看图像中某个像素点的HessianMatrix的定义为:
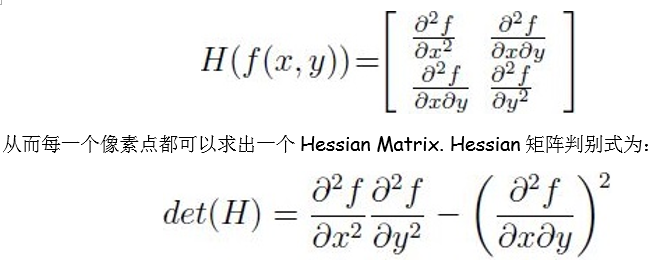
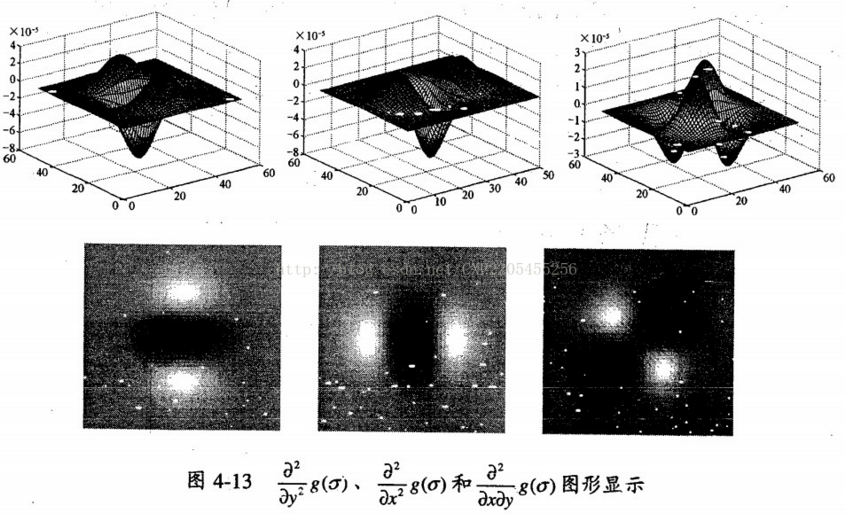
判别式的值是H矩阵的特征值,可以利用判定结果的符号将所有点分类,根据判别式取值正负,从来判别该点是或不是极点的值。在SURF算法中,通常用图像像素I(x,y)取代函数值f(x,y)。然后选用二阶标准高斯函数作为滤波器。通过特定核间的卷积计算二阶偏导数,这样便能计算出H矩阵的三个矩阵元素Lxx,Lxy, Lyy,从而计算出H矩阵公式如下


2.2 构造尺度空间
算法的尺度不变性主要靠不同尺度下寻找感兴趣点。谈到不同尺度就不得不说‘金字塔’。Lowe在其SIFT大作中是这样构造尺度空间的:对原图像不断地进行Gauss平滑+降采样。得到金字塔图像后,有进一步得到了DoG图,边和斑状结构就是通过DoG图得到其在原图的位置。
SURF中的做法与SIFT是有所不同的。SIFT算法在构造金字塔图层时Gauss滤波器大小不变,改变的是图像的大小;而SURF则恰恰相反:图像大小保持不变,改变的是滤波器的大小。
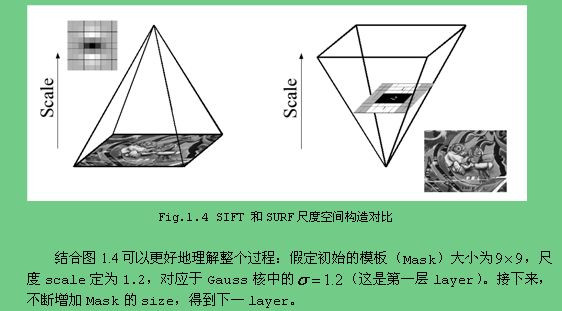
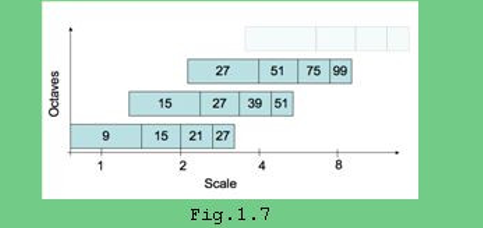
SURF首先采用9×9的盒子滤波器(近似等于σ=1.2时的高斯二阶微分,记为尺度s=1.2)得到的响应图像作为最底层的图像,然后逐渐增大盒子的尺寸,对原图像继续进行滤波处理。与SIFT类似,把响应图像分成若干组,每组若干层。每组都是采用逐渐增大的滤波器尺寸进行处理。层与层之间的尺度变化量是高斯二阶微分模板决定的。对于9×9的滤波器,由于要保证滤波器的结构比例不变同时要求存在滤波器模板中心,每个块最小增加量是2,由于有三个块,所以最小增加量是6,即下一个滤波器的大小为15×15,依次增加为21×21,27×27,...;利用这样的模板序列,就构造出尺度空间。
每一个octave中的filter的size可以表示如下
三、关键点
3.1非极大值点位
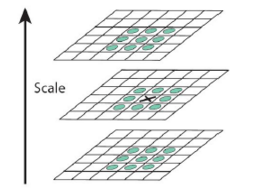
与SIFT类似,对每层图像上的每个像素与空间邻域内和尺度邻域内的响应值比较(不包括第一层与最后一层图像),同层上有8个邻域像元,向量尺度空间共有2×9=18个,共计26个像元的值进行比较,如果是极大值则保留下来,作为候选特征点。
同时如果特征点的响应值小于Hessia行列式的阈值,也被排除。
3.2删除不符合条件的极值点然后,采用3维线性插值法得到亚像素级的特征点,同时也去掉那些值小于一定阈值的点,增加极值使检测到的特征点数量减少,最终只有几个特征最强点会被检测出来,参考SIFT的方法
四,特征点描述子
4.1主方向
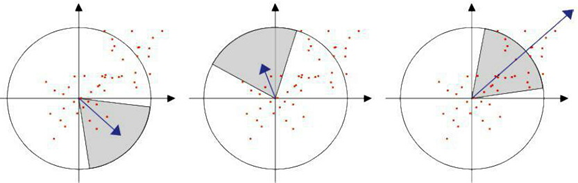
为了保证旋转不变性,在SURF中,不统计其梯度直方图,而是统计特征点领域内的Harr小波特征。即以特征点为中心,计算半径为6s(S为特征点所在的尺度值)的邻域内,统计60度扇形内所有点在x(水平)和y(垂直)方向的Haar小波响应总和(Haar小波边长取4s)

并给这些响应值赋高斯权重系数(σ=2.5s),使得靠近特征点的响应贡献大,而远离特征点的响应贡献小,然后60度范围内的响应相加以形成新的矢量,遍历整个圆形区域,选择最长矢量的方向为该特征点的主方向。这样,通过特征点逐个进行计算,得到每一个特征点的主方向。该过程的示意图如下:
4.2形成特征矢量
在SURF中,也是在特征点周围取一个正方形框,框的边长为20s(s是所检测到该特征点所在的尺度)。该框带方向,方向当然就是第4步检测出来的主方向了。然后把该框分为16个子区域,每个子区域统计25个像素的水平方向和垂直方向的haar小波特征,这里的x(水平)和y(垂直)方向都是相对主方向而言的。该haar小波特征为x(水平)方向值之和,水平方向绝对值之和,垂直方向之和,垂直方向绝对值之和。该过程的示意图如下所示:

这样每个子区域携带4个信息,共有16个子区域,共64维。最后为了防止光照与对比度的影响,对特征矢量归一化处理。
五、Opencv
<span style="font-family:SimSun;font-size:18px;">函数的定义看SIFT基本相同,只是SIFT换了SURF</span>- 使用 DescriptorExtractor 接口来寻找关键点对应的特征向量。
- 使用 SurfDescriptorExtractor 以及它的函数 compute 来完成特定的计算。
- 使用 BruteForceMatcher 来匹配特征向量。
- 使用函数 drawMatches 来绘制检测到的匹配点。
<span style="font-family:SimSun;font-size:18px;">#include "opencv2/core/core.hpp"
#include "opencv2/features2d/features2d.hpp"
#include "opencv2/highgui/highgui.hpp"
#include <opencv2/nonfree/nonfree.hpp>
#include<opencv2/legacy/legacy.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main( )
{
Mat srcImage1 = imread("hand1.jpg",1);
Mat srcImage2 = imread("hand3.jpg",1);
if( !srcImage1.data || !srcImage2.data )
{ printf("读取图片错误,请确定目录下是否有imread函数指定的图片存在~! \n"); return false; }
int minHessian = 700;
SurfFeatureDetector detector( minHessian );
std::vector<KeyPoint> keyPoint1, keyPoints2;
detector.detect( srcImage1, keyPoint1 );
detector.detect( srcImage2, keyPoints2 );
SurfDescriptorExtractor extractor;
Mat descriptors1, descriptors2;
extractor.compute( srcImage1, keyPoint1, descriptors1 );
extractor.compute( srcImage2, keyPoints2, descriptors2 );
BruteForceMatcher< L2<float> > matcher;
std::vector< DMatch > matches;
matcher.match( descriptors1, descriptors2, matches );
Mat imgMatches;
drawMatches( srcImage1, keyPoint1, srcImage2, keyPoints2, matches, imgMatches );//进行绘制
imshow("匹配图", imgMatches );
waitKey(0);
return 0;
}
</span>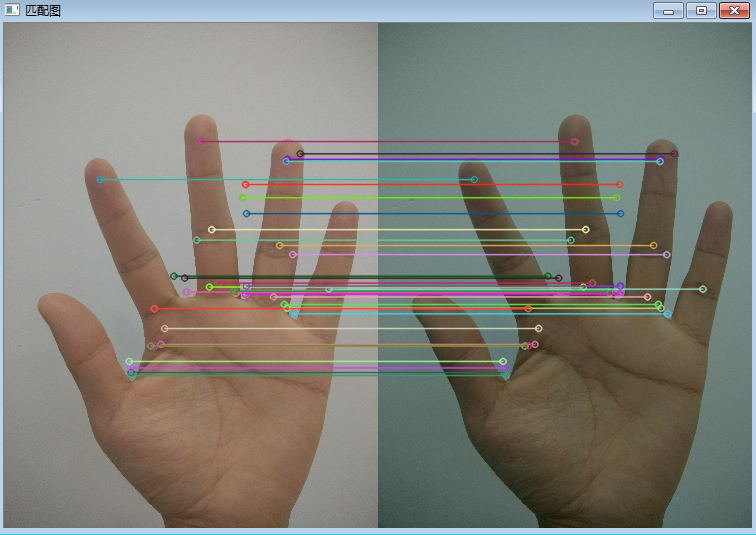
六、Matlab
程序源码由荷兰特温特大学的Dirk-Jan Kroon博士提供,可以自己去下载,比较复杂,这里提供一下结果
I1=imread('TestImages/testc1.png');
I2=imread('TestImages/testc2.png');
Options.upright=true;
Options.tresh=0.0001;
Ipts1=OpenSurf(I1,Options);
Ipts2=OpenSurf(I2,Options);
D1 = reshape([Ipts1.descriptor],64,[]);
D2 = reshape([Ipts2.descriptor],64,[]);
err=zeros(1,length(Ipts1));
cor1=1:length(Ipts1);
cor2=zeros(1,length(Ipts1));
for i=1:length(Ipts1),
distance=sum((D2-repmat(D1(:,i),[1 length(Ipts2)])).^2,1);
[err(i),cor2(i)]=min(distance);
end
[err, ind]=sort(err);
cor1=cor1(ind);
cor2=cor2(ind);
I = zeros([size(I1,1) size(I1,2)*2 size(I1,3)]);
I(:,1:size(I1,2),:)=I1; I(:,size(I1,2)+1:size(I1,2)+size(I2,2),:)=I2;
figure, imshow(I/255); hold on;
for i=1:30,
c=rand(1,3);
plot([Ipts1(cor1(i)).x Ipts2(cor2(i)).x+size(I1,2)],[Ipts1(cor1(i)).y Ipts2(cor2(i)).y],'-','Color',c)
plot([Ipts1(cor1(i)).x Ipts2(cor2(i)).x+size(I1,2)],[Ipts1(cor1(i)).y Ipts2(cor2(i)).y],'o','Color',c)
end
http://blog.csdn.net/cxp2205455256/article/details/41311013
http://www.open-open.com/lib/view/open1440832074794.html
http://blog.csdn.net/poem_qianmo/article/details/33320997
图像识别算法交流 QQ群:145076161,欢迎图像识别与图像算法,共同学习与交流