目录
1 分布式网络介绍
1.1 Kad网介绍
1.2 Kad网络节点距离
1.3 K桶
1.4 Kad通信协议
2 邻居节点
2.1 NodeTable类主要成员
2.2 邻居节点发现方法
2.3 邻居节点网络拓扑及刷新机制。
1 分布式网络介绍
以太坊底层分布式网络即P2P网络,使用了经典的Kademlia网络,简称kad。
1.1 Kad网介绍
Kademlia在2002年由美国纽约大学的PetarP.Manmounkov和DavidMazieres提出,是一种分布式散列表(DHT)技术,以异或运算为距离度量基础,已经在BitTorrent、BitComet、Emule等软件中得到应用。
1.2 Kad网络节点距离
以太坊网络节点距离计算方法:
Node1:节点1 NodeId
Node2:节点2 NodeId
1.3 K桶
Kad的路由表是通过称为K桶的数据构造而成,K桶记录了节点NodeId,distance,endpoint,ip等信息。以太坊K桶按照与target节点距离进行排序,共256个K桶,每个K桶包含16个节点。

图1.1
1.4 Kad通信协议
以太坊Kad网络中节点间通信基于UDP,主要由以下几个命令构成,若两个节点间PING-PONG握手通过,则认为相应节点在线。
Kad通信协议,基于UDP |
|||
序号 |
分类 |
功能描述 |
构成 |
1 |
PING |
探测一个节点,判断其是否在线 |
struct PingNode { h256 version = 0x3; Endpoint from; Endpoint to; uint32_t timestamp; }; |
2 |
PONG |
PING命令响应 |
struct Pong {Endpoint to; h256 echo; uint32_t timestamp; }; |
3 |
FINDNODE |
向节点查询某个与目标节点ID距离接近的节点 |
struct FindNeighbours {NodeId target; uint32_t timestamp; }; |
4 |
NEIGHBORS |
FIND_NODE命令响应,发送与目标节点ID距离接近的K桶中的节点 |
struct Neighbours {list nodes: struct Neighbour {inline Endpoint endpoint; NodeId node; }; uint32_t timestamp; }; |
2 邻居节点
2.1 NodeTable类主要成员
C++版本以太坊源码中,NodeTable是以太坊 P2P网络的关键类,所有与邻居节点相关的数据和方法均由NodeTable类实现。
序号 |
成员名称 |
说明 |
备注 |
1 |
m_node |
本节点,包含NodeId、endpoint、ip等 |
|
2 |
m_state |
K桶,包含邻居节点的NodeId、distance、endpoint、ip |
|
3 |
m_nodes |
已知的节点信息,但并没有加入到K桶 |
序号 |
函数名 |
路径 |
功能 |
1 |
NodeTable::NodeTable(ba::io_service& _io, KeyPair const& _alias, NodeIPEndpoint const& _endpoint, bool _enabled)
|
cpp-ethereum /libp2p/NodeTable.cpp |
NodeTable类构造函数,初始化K桶,发起邻居节点发现过程 |
2 |
void NodeTable::doDiscovery() |
Cpp-ethereum /libp2p/NodeTable.cpp |
具体发现函数 |
3 |
shared_ptr<NodeEntry> NodeTable::addNode(Node const& _node, NodeRelation _relation) |
cpp-ethereum /libp2p/NodeTable.cpp |
将节点加入m_nodes,并发起ping握手 |
4 |
void NodeTable::doDiscover(NodeID _node, unsigned _round, shared_ptr<set<shared_ptr<NodeEntry>>> _tried) |
cpp-ethereum /libp2p/NodeTable.cpp |
底层发现函数,从k桶中选出节点,发送FINDNODE命令 |
5 |
vector<shared_ptr<NodeEntry>> NodeTable::nearestNodeEntries(NodeID _target) |
cpp-ethereum /libp2p/NodeTable.cpp |
从K桶中选出节点 |
6 |
void NodeTable::onReceived(UDPSocketFace*, bi::udp::endpoint const& _from, bytesConstRef _packet) |
cpp-ethereum /libp2p/NodeTable.cpp |
Kad协议处理 |
7 |
void NodeTable::noteActiveNode(Public const& _pubk, bi::udp::endpoint const& _endpoint) |
cpp-ethereum /libp2p/NodeTable.cpp |
将新节点加入到K桶 |
2.2 邻居节点发现方法
邻居节点是指加入到K桶,并通过PING-PONG握手的节点。
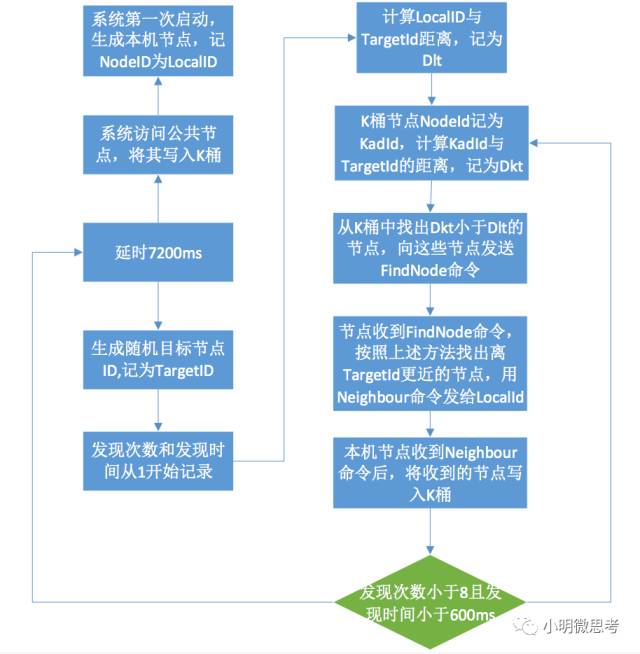
图2.1
邻居节点发现流程说明:
系统第一次启动随机生成本机节点NodeId,记为LocalId,生成后将固定不变,本地节点记为local-eth。
系统读取公共节点信息,ping-pong握手完成后,将其写入K桶。
系统每隔7200ms刷新一次K桶。
刷新K桶流程如下:
a. 随机生成目标节点Id,记为TargetId,从1开始记录发现次数和刷新时间。
b. 计算TargetId与LocalId的距离,记为Dlt
c. K桶中节点的NodeId记为KadId,计算KadId与TargetId的距离,记为Dkt
d. 找出K桶中Dlt大于Dkt的节点,记为k桶节点,向k桶节点发送FindNODE命令,FindNODE命令包含TargetId
e. K桶节点收到FindNODE命令后,同样执行b-d的过程,将从K桶中找到的节点使用Neighbours命令发回给本机节点。
f. 本机节点收到Neighbours后,将收到的节点写入到K桶中。
g. 若搜索次数不超过8次,刷新时间不超过600ms,则返回到b步骤循环执行。
2.3 邻居节点网络拓扑及刷新机制。
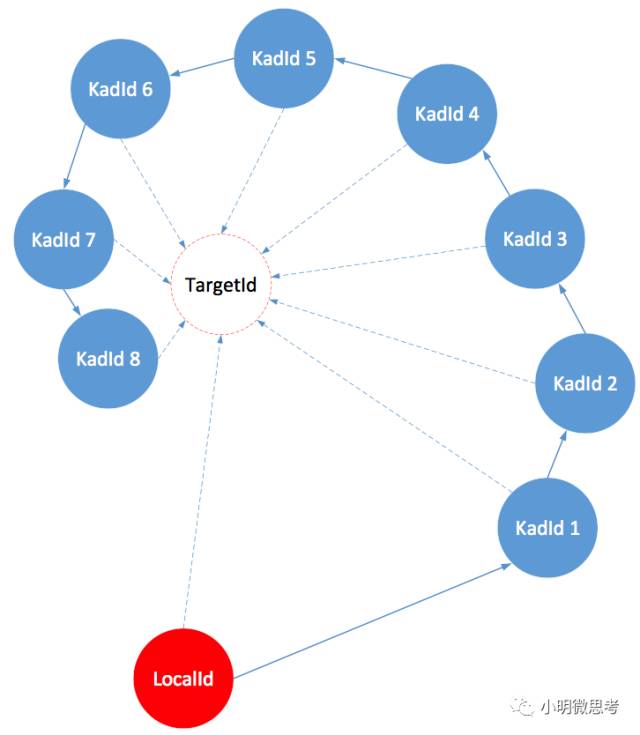
图2.2