【转载请标明出处】https://blog.csdn.net/qq_25870633/article/details/82705217
查找算法相信各位大佬都不是很陌生吧!很多时候我们需要快速的从某些集合中快速的找到我们想要的内容,或者说我们需要快速的判断某些内容是否存在于某集合中,这就涉及到了查找算法!主要是我最近要去面试了,在复习,所以顺便总结总结查找算法了,免得面试的时候有些吊毛让我手写算法就尴尬了~
查找算法分类:
1)静态查找和动态查找;
注:静态或者动态都是针对查找表而言的。动态表指查找表中有删除和插入操作的表。
2)无序查找和有序查找。
无序查找:被查找数列有序无序均可;
有序查找:被查找数列必须为有序数列。
首先我们先看看查找算法一般都有哪一些,
七大查找算法:顺序查找、二分查找、差值查找、斐波那契查找、 树表查找 (二叉树查找、平衡查找树之2-3查找树、平衡查找树之红黑树、B树和B+树)、分块查找、哈希查找、图查找 (广度优先查找、深度优先查找)
顺序查找:
属于线性查找、无序查找;说白了就是从头找到尾
二分查找:
二分查找,顾名思义是对一段序列不断的做折半对比,最终找出目标值的方式
适用场景:
有序的,非动态的序列
如代码:
func binarySearch(arr []int, k int) int {
left, right, mid := 1, len(arr), 0
for {
// mid向下取整
mid = int(math.Floor(float64((left + right) / 2)))
if arr[mid] > k {
// 如果当前元素大于k,那么把right指针移到mid - 1的位置
right = mid - 1
} else if arr[mid] < k {
// 如果当前元素小于k,那么把left指针移到mid + 1的位置
left = mid + 1
} else {
// 否则就是相等了,退出循环
break
}
// 判断如果left大于right,那么这个元素是不存在的。返回-1并且退出循环
if left > right {
mid = -1
break
}
}
// 输入元素的下标
return mid
}
func binarySearch2(sortedArray []int, lookingFor int) int {
var low int = 0
var high int = len(sortedArray) - 1
for low <= high {
var mid int =low + (high - low)/2
var midValue int = sortedArray[mid]
if midValue == lookingFor {
return mid
} else if midValue > lookingFor {
high = mid -1
} else {
low = mid + 1
}
}
return -1
}
func binarySearch3(arr []int, k int) int {
low := 0
high := len(arr) - 1
for low <= high {
// 这种写法防止两数和导致的内存溢出
mid := low + (high-low)>>1 // avg=(a+b)>>1://右移表示除2,左移表示乘2
if k < arr[mid] {
high = mid - 1
} else if k > arr[mid] {
low = mid + 1
} else {
return mid
}
}
return -1
}
func binarySearch4(arr []int, k int) int {
low := 0
high := len(arr) - 1
for low <= high {
/**
利用位与(&)提取出两个数相同的部分,利用异或(^)拿出两个数不同的部分的和,相同的部分加上不同部分的和除2即得到两个数的平均值
异或: 相同得零,不同得1 == 男男等零,女女得零,男女得子
avg = (a&b) + (a^b)>>1;
或者
avg = (a&b) + (a^b)/2;
*/
mid := low & high + (low ^ high) >> 1
if k < arr[mid] {
high = mid - 1
} else if k > arr[mid] {
low = mid + 1
} else {
return mid
}
}
return -1
}【注】:第三、第四种方法逼格最高,第四种效率最快
差值查找:
折半查找的进化版,自适应中间值
根据 (关键值 - 起始值) / (末位值 - 起始值) 的比例来决定中间值的下标,这样能够快速的缩小查找范围,会比直接折半好很多
适用场景:
有序的,非动态的序列
如代码:
func insertSearch(arr []int, key int) int{
low := 0
high := len(arr) - 1
time := 0
for low < high {
time += 1
// 计算mid值是插值算法的核心代码 实际上就是
mid := low + int((high - low) * (key - arr[low])/(arr[high] - arr[low]))
if key < arr[mid] {
high = mid - 1
}else if key > arr[mid] {
low = mid + 1
}else {
return mid
}
}
return -1
}斐波那契查找:
在介绍斐波那契查找算法之前,我们先介绍一下很它紧密相连并且大家都熟知的一个概念:黄金分割。
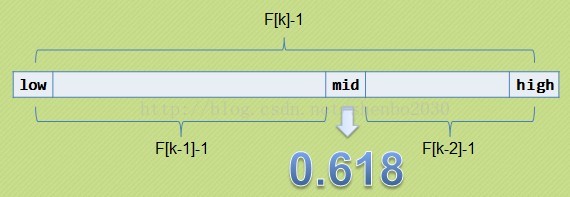
黄金比例又称黄金分割,是指事物各部分间一定的数学比例关系,即将整体一分为二,较大部分与较小部分之比等于整体与较大部分之比,其比值约为1:0.618或1.618:1。
0.618 被公认为最具有审美意义的比例数字,斐波那契数列:1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89…….(从第三个数开始,后边每一个数都是前两个数的和)。然后我们会发现,随着斐波那契数列的递增,前后两个数的比值会越来越接近0.618,利用这个特性,我们就可以将黄金比例运用到查找技术中。
也是二分查找的一种提升算法,通过运用黄金比例的概念在数列中选择查找点进行查找,提高查找效率。同样地,斐波那契查找也属于一种有序查找算法。
适用场景:
有序的,非动态的序列
如代码:
/**
基本思想:利用黄金分割 0.168 :1 来确定中间值;也是二分查找一种改进版
用文字来说,就是费波那契数列由0和1开始,之后的费波那契系数就是由之前的两数相加而得出。
0, 1, 1, 2, 3, 5, 8, 13, 21, 34, 55, 89, 144, 233…… 特别指出:0不是第一项,而是第零项
数列的值为: F(0)=0,F(1)=1, F(n)=F(n-1)+F(n-2)(n>=2,n∈N*) n为数组下标
|--------------- F(K)-1 ---------------|
low mid high
|______________________|_______________|
|------- F(K-1)-1 -----|--- F(K-2)-1 --|
他要求开始表中记录的个数为某个斐波那契数小1,即n = F(k)-1;开始将key值(要查找的数据)与第F(k-1)位置的记录进行比较(即mid = low + F(k-1) - 1),比较结果也分为三种:
(1)相等,mid位置的元素即为所求;
(2)大于,low=mid+1,k-=2。说明:low=mid+1 :说明待查找的元素在[mid+1,high]范围内,k-=2 :说明范围[mid+1,high]内的元素个数为n-(F(k-1))= Fk-1-F(k-1)=Fk-F(k-1)-1=F(k-2)-1个,所以可以递归的应用斐波那契查找。
(3)小于,high=mid-1,k-=1。说明:low=mid+1说明待查找的元素在[low,mid-1]范围内,k-=1 说明范围[low,mid-1]内的元素个数为F(k-1)-1个,所以可以递归 的应用斐波那契查找
*/
func fibonacciSearch (arr []int, key int) int {
// 生成裴波那契数列,因为我们要满足 len(arr) = F(k) - 1
fibArr := make([]int, 0)
// 因为 斐波那契数列的性质我们知道数据递增的特别快,所以我们这里随机选择 生成的数列长度 36 够用了
// [0 1 1 2 3 5 8 13 21 34 55 89 144 233 377 610 987 1597 2584 4181 6765 10946 17711 28657 46368 75025 121393 196418 317811 514229 832040 1346269 2178309 3524578 5702887 9227465 14930352]
for i := 0; i <= 36; i++ {
fibArr = append(fibArr, fibonacci(i))
}
//fmt.Println(fibArr)
// 确定待查找数组在裴波那契数列的位置
k := 0
n := len(arr)
// 此处 n > fib[k]-1 也是别有深意的
// 若n恰好是裴波那契数列上某一项,且要查找的元素正好在最后一位,此时必须将数组长度填充到数列下一项的数字
for n > fibArr[k]-1 {
k = k + 1
}
//fmt.Println(k, fibArr[k])
// 将待查找数组填充到指定的长度
for i := n; i < fibArr[k]; i++ {
arr = append(arr, 0)
}
low, high := 0, n-1
for low <= high {
// 获取黄金分割位置元素下标
mid := low + fibArr[k-1] - 1
if key < arr[mid] {
// 若key比这个元素小, 则key值应该在low至mid - 1之间,剩下的范围个数为F(k-1) - 1
high = mid - 1
k -= 1
}else if key > arr[mid] {
// 若key比这个元素大, 则key至应该在mid + 1至high之间,剩下的元素个数为F(k) - F(k-1) - 1 = F(k-2) - 1
low = mid + 1
k -= 2
}else {
if mid < n {
return mid
}else {
return n - 1
}
}
}
return -1
}
/**
生成 斐波那契数列
*/
// 最屌写法
func fibonacci(n int) int {
if n < 2 {
return n
}
var fibarry = [3]int{0, 1, 0}
for i := 2; i <= n; i++ {
fibarry[2] = fibarry[0] + fibarry[1]
fibarry[0] = fibarry[1]
fibarry[1] = fibarry[2]
}
return fibarry[2]
}
//递归实现
func Fibo1(n int) int {
if n == 0 {
return 0
} else if n == 1 {
return 1
} else if n > 1 {
return Fibo1(n-1) + Fibo1(n-2)
} else {
return -1
}
}
//迭代实现
func Fibo2(n int) int {
if n < 0 {
return -1
} else if n == 0 {
return 0
} else if n <= 2 {
return 1
} else {
a, b := 1, 1
result := 0
for i := 3; i <= n; i++ {
result = a + b
a, b = b, result
}
return result
}
}
//利用闭包
func Fibo3(n int) int {
if n < 0 {
return -1
} else {
f := Fibonacci()
result := 0
for i := 0; i < n; i++ {
result = f()
}
return result
}
}
func Fibonacci() func() int {
a, b := 0, 1
return func() int {
a, b = b, a+b
return a
}
}树查找 【二叉树查找】:
二叉查找树是先对待查找的数据进行生成树,确保树的左分支的值小于右分支的值,然后再用所查数据和每个节点的父节点比较大小,查找最适合的范围。 这个算法的查找效率很高,但是如果使用这种查找方法要首先创建树。
适用场景:
前面的几种查找算法因为都是适用于有序集,在插入和删除操作上就需要耗费大量的时间。有没有一种既可以使得插入和删除效率不错,又可以比较高效的实现查找的算法。
二叉查找树(BinarySearch Tree,也叫二叉搜索树,或称二叉排序树Binary Sort Tree)或者是一棵空树,或者是具有下列性质的二叉树:
1)若任意节点的左子树不空,则左子树上所有结点的值均小于它的根结点的值;
2)若任意节点的右子树不空,则右子树上所有结点的值均大于它的根结点的值;
3)任意节点的左、右子树也分别为二叉查找树。
二叉查找树性质:对二叉查找树进行中序遍历,即可得到有序的数列。【注:什么是前序、中序、后序遍历,请参考: http://www.cnblogs.com/turnips/p/5096578.html】
如代码:
/**
基本思路:先把数组构造出一颗二叉树的样纸,然后查找的时候在从root往下对比
*/
func BSTsearch(arr []int, key int) int{
// 先在内存中构造 二叉树
tree := new(Tree)
for i, v := range arr {
Insert(tree, v, i)
}
// 开始二叉树查找目标key
return searchKey(tree.Root, key)
}
// 节点结构
type Node struct {
Value, Index int // 元素的值和在数组中的位置
Left, Right *Node
}
// 树结构
type Tree struct {
Root *Node
}
// 把数组的的元素插入树中
func Insert(tree *Tree, value, index int){
if nil == tree.Root {
tree.Root = newNode(value, index)
}else {
InsertNode(tree.Root, newNode(value, index))
}
}
// 把新增的节点插入树的对应位置
func InsertNode(root, childNode *Node) {
// 否则,先和根的值对比
if childNode.Value <= root.Value {
// 如果小于等于跟的值,则插入到左子树
if nil == root.Left {
root.Left = childNode
}else {
InsertNode(root.Left, childNode)
}
}else{
// 否则,插入到右子树
if nil == root.Right {
root.Right = childNode
}else {
InsertNode(root.Right, childNode)
}
}
}
func newNode(value, index int) *Node {
return &Node{
Value: value,
Index: index,
}
}
// 在构建好的二叉树中,从root开始往下查找对应的key 返回其在数组中的位置
func searchKey(root *Node, key int) int {
if nil == root {
return -1
}
if key == root.Value {
return root.Index
}else if key < root.Value {
// 往左子树查找
return searchKey(root.Left, key)
}else {
// 往右子树查找
return searchKey(root.Right, key)
}
}【注意】:总的来说就是,需要先构造一个二叉树,然后把数组的元素和索引放置树的对应位置,然后在从输的root逐个换个key做对比,取出key所在数组中的index
其中,2-3树、红黑树、B/B+树,后续有时间再完善了
2-3 树查找:
/**
2-3树 也叫 平衡树
基本思路:
*/
红黑树查找:
/**
红黑树是2-3树的一种简单高效的实现
基本思路:
*/
B/B+树查找:
/**
B/B+树是2-3树的另一种拓展,在文件系统和数据库系统中有着广泛的应用
基本思路:
*/
分块查找:
参考:http://www.lishiyu.cn/post/46.html
是顺序查找的一种结合改进;
将n个数据元素"按块有序"划分为m块(m ≤ n)。每一块中的结点不必有序,但块与块之间必须"按块有序";即第1块中任一元素的关键字都必须小于第2块中任一元素的关键字;而第2块中任一元素又都必须小于第3块中的任一元素,……
算法流程:
step1 :先选取各块中的最大关键字构成一个索引表;
step2 :查找分两个部分:先对索引表进行二分查找或顺序查找,以确定待查记录在哪一块中;然后,在已确定的块中用顺序法进行查找。
如代码:【先省略...我还没写出来...水了】
Hash查找:
说白了就是用一个二维数组来装原数组经过Hash运算后的值,如,第一维是 元素Hash后的值,第二维依次装着该 key在原数组中出现的索引号 <因为原数组中的 元素可能会有相同的,所以Hash值也会一样,所以用了二维数组>。在查找的时候可以先计算Hash然后用顺序查找在第一维中找到对应的Hash,然后在第二维中依次返回里面的内容<也就是该key在原数组中的索引值>;如果没找到对应Hash,则原数组没有包含该key
代码:【先省略...我还没写出来...水了】
在说广度和深度之前我们先来看看一些关于广度和深度的知识:
广度优先:从图中某顶点v出发,在访问了v之后依次访问v的各个未曾访问过的邻接点,然后分别从这些邻接点出发依次访问它们的邻接点,并使得“先被访问的顶点的邻接点先于后被访问的顶点的邻接点被访问,直至图中所有已被访问的顶点的邻接点都被访问到。如果此时图中尚有顶点未被访问,则需要另选一个未曾被访问过的顶点作为新的起始点,重复上述过程,直至图中所有顶点都被访问到为止。
换句话说,广度优先搜索遍历图的过程是以v为起点,由近至远,依次访问和v有路径相通且路径长度为1,2...的顶点。
如图:
【无向图的广度优先搜索】
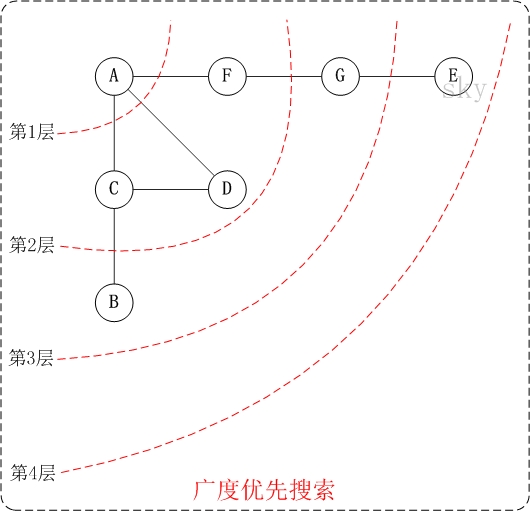
第1步:访问A。
第2步:依次访问C,D,F。
在访问了A之后,接下来访问A的邻接点。前面已经说过,在本文实现中,顶点ABCDEFG按照顺序存储的,C在"D和F"的前面,因此,先访问C。再访问完C之后,再依次访问D,F。
第3步:依次访问B,G。
在第2步访问完C,D,F之后,再依次访问它们的邻接点。首先访问C的邻接点B,再访问F的邻接点G。
第4步:访问E。
在第3步访问完B,G之后,再依次访问它们的邻接点。只有G有邻接点E,因此访问G的邻接点E。
因此访问顺序是:A -> C -> D -> F -> B -> G -> E
【有向图的广度优先搜索】
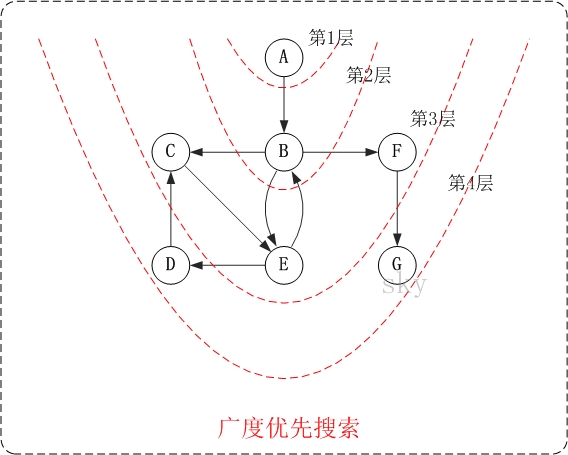
第1步:访问A。
第2步:访问B。
第3步:依次访问C,E,F。
在访问了B之后,接下来访问B的出边的另一个顶点,即C,E,F。前面已经说过,在本文实现中,顶点ABCDEFG按照顺序存储的,因此会先访问C,再依次访问E,F。
第4步:依次访问D,G。
在访问完C,E,F之后,再依次访问它们的出边的另一个顶点。还是按照C,E,F的顺序访问,C的已经全部访问过了,那么就只剩下E,F;先访问E的邻接点D,再访问F的邻接点G。
因此访问顺序是:A -> B -> C -> E -> F -> D -> G
深度优先:
假设初始状态是图中所有顶点均未被访问,则从某个顶点v出发,首先访问该顶点,然后依次从它的各个未被访问的邻接点出发深度优先搜索遍历图,直至图中所有和v有路径相通的顶点都被访问到。 若此时尚有其他顶点未被访问到,则另选一个未被访问的顶点作起始点,重复上述过程,直至图中所有顶点都被访问到为止。
显然,深度优先搜索是一个递归的过程。
如图:
【无向图的深度优先搜索】

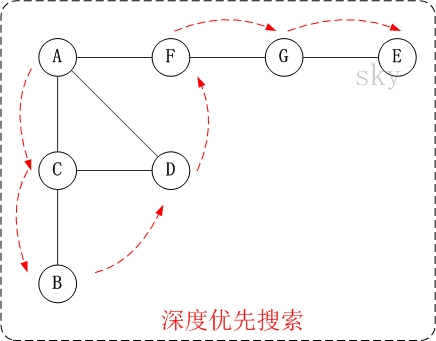
第1步:访问A。
第2步:访问(A的邻接点)C。
在第1步访问A之后,接下来应该访问的是A的邻接点,即"C,D,F"中的一个。但在本文的实现中,顶点ABCDEFG是按照顺序存储,C在"D和F"的前面,因此,先访问C。
第3步:访问(C的邻接点)B。
在第2步访问C之后,接下来应该访问C的邻接点,即"B和D"中一个(A已经被访问过,就不算在内)。而由于B在D之前,先访问B。
第4步:访问(C的邻接点)D。
在第3步访问了C的邻接点B之后,B没有未被访问的邻接点;因此,返回到访问C的另一个邻接点D。
第5步:访问(A的邻接点)F。
前面已经访问了A,并且访问完了"A的邻接点B的所有邻接点(包括递归的邻接点在内)";因此,此时返回到访问A的另一个邻接点F。
第6步:访问(F的邻接点)G。
第7步:访问(G的邻接点)E。
因此访问顺序是:A -> C -> B -> D -> F -> G -> E
【有向图的深度优先搜索】

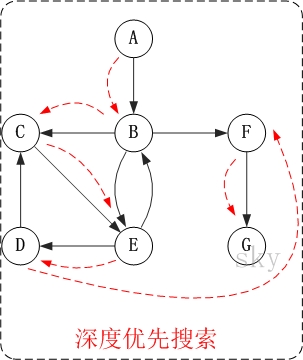
第1步:访问A。
第2步:访问B。
在访问了A之后,接下来应该访问的是A的出边的另一个顶点,即顶点B。
第3步:访问C。
在访问了B之后,接下来应该访问的是B的出边的另一个顶点,即顶点C,E,F。在本文实现的图中,顶点ABCDEFG按照顺序存储,因此先访问C。
第4步:访问E。
接下来访问C的出边的另一个顶点,即顶点E。
第5步:访问D。
接下来访问E的出边的另一个顶点,即顶点B,D。顶点B已经被访问过,因此访问顶点D。
第6步:访问F。
接下应该回溯"访问A的出边的另一个顶点F"。
第7步:访问G。
因此访问顺序是:A -> B -> C -> E -> D -> F -> G
以上几张图和步骤的说明,是抄了 https://www.cnblogs.com/skywang12345/p/3711483.html 的,哼,我怎么可能写的出来呢,天真~
又如代码:
package main
import "fmt"
func main() {
/**
图的形式:
var r = make(map[string][]string)
r["A"] = []string{"B", "C", "D"}
r["B"] = []string{"A", "E"}
r["C"] = []string{"A", "E"}
r["D"] = []string{"A"}
r["E"] = []string{"B", "C", "F"}
r["F"] = []string{"E"}
*/
// 构造图
fillGraph()
// 广度遍历
g.BFS(func(node *TNode) {
fmt.Printf("B-F-S visiting... %v\n", node)
})
// 深度遍历
g.DFS(func(node *TNode) {
fmt.Printf("DFS visiting... %v\n", node)
})
}
/**
图按照不同的特征可以分为以下类别:
- 有向图
- 无向图
- 有权图
- 无权图
- 连通图
- 非连通图
*/
/**
图的两种表示方法
邻接矩阵
var s = [][]int{
{0, 1, 1, 1, 0, 0},
{1, 0, 0, 0, 1, 0},
{1, 0, 0, 0, 1, 0},
{1, 0, 0, 0, 0, 0},
{0, 1, 1, 0, 0, 0},
{0, 0, 0, 0, 1, 0},
}
邻接表表示
var r = make(map[string][]string)
r["A"] = []string{"B", "C", "D"}
r["B"] = []string{"A", "E"}
r["C"] = []string{"A", "E"}
r["D"] = []string{"A"}
r["E"] = []string{"B", "C", "F"}
r["F"] = []string{"E"}
*/
// 组成图的顶点
type TNode struct {
Value interface{}
}
// 定义一个图的结构, 图有顶点与边组成 V E
type ItemGraph struct {
Nodes []*TNode // 顶点 集合
/** 采用 邻接表 */
Edges map[TNode][]*TNode // 边 集合
}
// 添加节点
func (g *ItemGraph) AddNode(n *TNode) {
g.Nodes = append(g.Nodes, n)
}
// 添加边
func (g *ItemGraph) AddEdge(n1, n2 *TNode) {
if g.Edges == nil{
g.Edges = make(map[TNode][]*TNode)
}
// 无向图
g.Edges[*n1] = append(g.Edges[*n1], n2) // 设定从节点n1到n2的边
g.Edges[*n2] = append(g.Edges[*n2], n1) // 设定从节点n2到n1的边
}
// 打印图
func (g *ItemGraph) String() {
s := ""
for i := 0; i< len(g.Nodes); i++{
s += g.Nodes[i].String() + "->"
near := g.Edges[*g.Nodes[i]]
for j :=0; j<len(near); j++{
s += near[j].String() + " "
}
s += "\n"
}
fmt.Println(s)
}
func (n *TNode) String() string {
return fmt.Sprintf("%v", n.Value)
}
// 深度用栈,广度用队列
// 深度优先遍历可以通过递归实现,而广度优先遍历要转换成类似于树的层序遍历来实现
/////////////////////////////////////////////////////////// 广度遍历 ///////////////////////////////////////////////////////////
/**
首先bfs 广度优先搜索
此处结合队列实现图的广度优先遍历
广度优先遍历,这个遍历类似于层序遍历,每遍历一层,需要记住当前层的节点,
然后与遍历当前层相连的节点,如此实现遍历。需要一个队列来记住当前层,先进先出。
还有一个问题,就是需要防止回路,也就是说,一个节点不能遍历两次。这里用了Golang内置的map实现
*/
// 定义缓冲队列
type NodeQueue struct {
Items []TNode
}
func (s *NodeQueue) New() {
s.Items = make([]TNode, 0)
}
// 从队尾入队
func (s *NodeQueue) Enqueue(t TNode) {
s.Items = append(s.Items, t)
}
// 从对头出队
func (s *NodeQueue) Dequeue() *TNode {
item := s.Items[0]
s.Items = s.Items[1:len(s.Items)]
return &item
}
// 是否空队列
func (s *NodeQueue) IsEmpty() bool {
return len(s.Items) == 0
}
/**
广度优先 BFS
*/
func (g *ItemGraph) BFS(f func(node *TNode)) {
// 初始化队列
q := new(NodeQueue)
q.New()
// 获取图的首个节点
n := g.Nodes[0]
// 首节点入队
q.Enqueue(*n)
// 缓存是否被某节点是否被遍历过的检查
visited := make(map[*TNode]bool)
// 初始时, 首节点标识位遍历过
visited[n] = true
for {
// 如果全部遍历完时,缓冲队列为空
if q.IsEmpty(){
break
}
// 节点出队
node := q.Dequeue()
// 获取当前节点的边,即和该节点相邻的其他节点
nearArr := g.Edges[*node]
// 先遍历完该节点所有相邻的节点 (也就是这一层的)
for i :=0; i < len(nearArr); i++{
j := nearArr[i]
// 只要是该节点没有被曾经遍历过,即可入队
if !visited[j]{
q.Enqueue(*j)
visited[j] = true
}
}
if f != nil{
// 打印当前节点信息
f(node)
}
}
}
/**
BFS 广度优先搜索
此处结合队列实现图的广度优先遍历
广度优先遍历,这个遍历类似于层序遍历,每遍历一层,需要记住当前层的节点,
然后与遍历当前层相连的节点,如此实现遍历。需要一个队列来记住当前层,先进先出。
还有一个问题,就是需要防止回路,也就是说,一个节点不能遍历两次。这里用了Golang内置的map实现
*/
/**
DFS 深度优先搜索
此处结合栈实现图的深度优先遍历
深度优先遍历, 是沿着一个方向先遍历到底,再沿另外的方向一路到底
*/
// 定义缓冲栈
type NodeStack struct {
Items []TNode
}
func (n *NodeStack) New() {
n.Items = make([]TNode, 0)
}
// 压栈
func (n *NodeStack) push(q TNode) {
n.Items = append(n.Items, q)
}
// 弹栈
func (n *NodeStack) pop() *TNode {
item := n.Items[len(n.Items) - 1] //取最后一个
n.Items = n.Items[0: len(n.Items) - 1]
return &item
}
// 判断是否空栈
func (n *NodeStack) IsEmpty() bool {
return len(n.Items) == 0
}
// 栈宽
func (n *NodeStack) Size() int {
return len(n.Items)
}
/**
深度优先 DFS
*/
func (g *ItemGraph) DFS(f func(node *TNode)) {
// 初始化栈
stack := new(NodeStack)
stack.New()
// 取出图的首节点
n := g.Nodes[0]
// 压栈
stack.push(*n)
// 缓存是否被某节点是否被遍历过的检查
visited := make(map[*TNode] bool)
// 初始时, 首节点标识位遍历过
visited[n] = true
for {
// 如果全部遍历完时,缓冲栈为空
if stack.IsEmpty(){
break
}
// 弹栈
node := stack.pop()
/** 注意:这里和 广度的不一样,因为在深度中,当前这一层的某个节点可能在之前的某次深度中已经被遍历过了 */
if !visited[node]{
visited[node] = true
}
// 获取当前节点的边,即和该节点相邻的其他节点
nearArr := g.Edges[*node]
for i:= 0; i< len(nearArr); i++{
j := nearArr[i]
if !visited[j]{
visited[j] = true
stack.push(*j)
}
}
if f != nil{
// 打印当前节点信息
f(node)
}
}
}
/**
测试
*/
var g ItemGraph
func fillGraph() {
// 构造所有游离态的节点
nA := TNode{"A"}
nB := TNode{"B"}
nC := TNode{"C"}
nD := TNode{"D"}
nE := TNode{"E"}
nF := TNode{"F"}
// 往图中聚集节点
g.AddNode(&nA)
g.AddNode(&nB)
g.AddNode(&nC)
g.AddNode(&nD)
g.AddNode(&nE)
g.AddNode(&nF)
// 添加边;图中的节点通过 链表关联起来
g.AddEdge(&nA, &nB)
g.AddEdge(&nA, &nC)
g.AddEdge(&nB, &nE)
g.AddEdge(&nC, &nE)
g.AddEdge(&nE, &nF)
g.AddEdge(&nD, &nA)
}
以上就是,深度和广度的遍历,下面我们来看看,深度和广度的查找,很简单,只要对上面的遍历方法稍加改动就可以是查找方法了。<无论是查找key还是查找 起始节点到目标节点的路径都是可以的 >
好了,今天就写这么多了,累死我了!