节点定位方法
3. 基于移动 BS 的定位
在基于静态信标节点的定位方法中,定位系统的定位精度与静态信标节点的部署密度和质量直接相关。为了获得好的定位精度,就需要在部署区域中放置大量的静态信标节点,这势必会导致定位成本的大幅上升。为此,研究者提出了基于移动信标节点的辅助定位方法。移动信标节点沿一定的轨迹扫描整个部署区域,在移动的过程中以一定的频率广播包含自身动态位置信息的虚拟信标;未知节点接收通信范围内的虚拟信标,根据其与虚拟信标的距离或方位信息计算自身位置。在该方法中,可重复利用的移动信标节点取代了大量的静态信标节点,降低了定位成本;移动的信标节点给未知节点提供大量的虚拟信标,降低了估测误差,提高了定位精度。
3.1 移动信标节点的优点
与基于静态信标的定位算法相比,基于移动信标的节点定位算法有以下优点
- 定位成本低
信标节点需通过 GPS 或人工部署来获得自身位置,所有其成本要比普通的传感器节点高很多。使用一个移动信标节点能够移动的代替所有的信标节点,这使得定位成本大幅度降低。
- 定位精度高
移动信标节点能够动态的提供实时的高精度位置信息。通过在部署区域移动能够提供良好的虚拟信标密度,给未知节点提供良好的定位条件,使得定位精度增高。
- 良好的网络拓扑结构
在部署大规模的 WSNs 网络中,节点的部署往往是通过随机抛洒的方式布置。这样的方式必然会是网络中信标节点与未知节点的配比密度不够好,导致整个网络的拓扑结构不好,导致定位误差增加。而在基于移动信标节点的方法中却不存在这个问题,移动信标能够给整个网络提供良好的虚拟信标密度,从而使网络拓扑结构良好,使得定位误差降低。
- 定位覆盖率高
WSNs 网络中的节点是随机部署的,未知节点能够定位与周边是否有足够多信标节点有关。当信标节点数量不够的时候该区域的未知节点就不能完成定位。特别是部署区域的边际区域。但基于移动信标辅助的节点定位算法能够通过移动信标节点在部署区域中来回扫描,确保节点都能够获得定位所需的信标节点数量,从而提高了定位的覆盖率。
3.2 基于测距的方法
Sichitiu 等人最早使用移动信标节点进行 WSNs 定位研究,他们利用一个移动的信标节点在部署区域中移动,且在移动的过程中广播包含自身位置信息的虚拟信标节点;未知节点通过 RSS 测距方法获得与虚拟信标节点的距离,当获得三个以上的虚拟信标的坐标和距离信息之后,通过三边测量法计算自身位置。 Ssu 等人提出了一种基于移动信标节点的 TDOA 定位方法。该方法使移动信标节点沿两个方向直线运动,且在运动的过程中连续密集的广播虚拟信标信息(包括了虚拟信标的位置和广播频率)。未知节点记录下两次移动经过其通信范围内的时间,即虚拟信标第一次进入通信范围和最后一次出现在通信范围内的时间差。这时间和飞行速度的帮助下很容易计算出两个虚拟信标的直线距离,将这两条线段作为未知节点通信范围内的两条弦,通过两条弦的垂直平分线交点计算未知节点坐标。
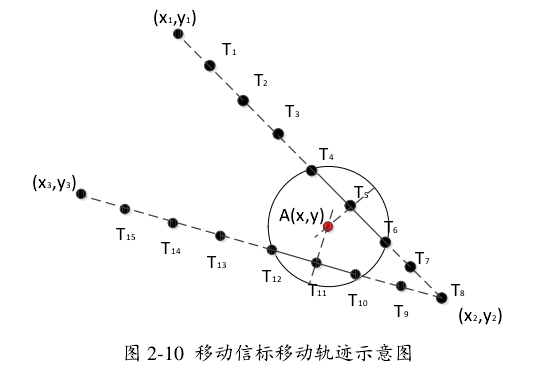
由图所示,具有移动性的节点是规律性的发送自己的坐标信息,在其范围内的未知节点监测并记入下其第一个和最后一个的节点坐标信息,再通过该算法可以大约的知道在通信范围内未知节点的一根弦。如果动态的节点有多次经过未知节点的通信范围,那么我们就可以构建该未知节点通信范围内的多条弦,在这里如果任意的两条弦垂直正交的话,交点则是该节点的坐标。在未知节点对移动节点位置信息的记录需要消耗很大的存储资源和通信资源。
3.3 基于非测距的方法
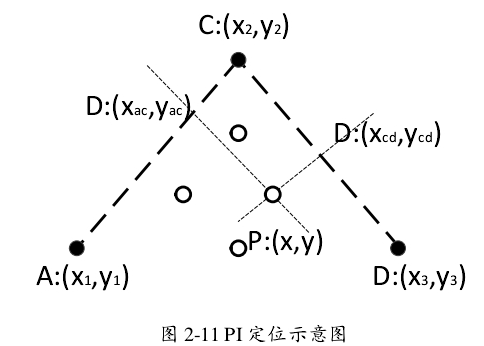
Guo 等人提出来一种 PI(Perpendicular Intersection)定位方法,其利用的是未知节点与虚拟信标节点的几何关系,通过几何方法计算未知节点坐标。移动节点沿早已设计好的“三角形”路线在部署区域中移动,因此每个未知节点都能获得如图所示的几何定位条件。图中三角形 ACD 是移动信标节点的三角移动路径,在信标节点移动的过程中,信标节点会连续的发送虚拟信标节点,未知节点分别记录下 AC、CD 路径上接收到最大 RSS 的虚拟信标节点位置,将该位置作为从未知节点作垂线垂直于路径的交点,在两条垂线的帮助下可计算出未知节点坐标。
3.4 移动路径规划问题
从基于移动信标节点的定位算法中可以发现,移动信标节点的移动路径规划问题是该类方法的一个基本问题。Sichitiu 等人提出的 RWP 路径,它是一种让移动信标每运动到一个位置,随机的选择移动的方向运动一定的时间,当运行一段时间之后结束移动。然而这样的路径不能确保遍历到了所有的部署区域,且很可能会重复的遍历同一个区域。针对 RWP 路径的重复遍历和存在盲区的问题,Koutsonikolas 等人提出了 SCAN,DOUBLE SCAN 和 HILBERT 三种路径方案。SCAN 是一种沿同一方向(例如:x 或 y 轴方向),从一边扫描到另一边的简单扫描路径。它能够唯一的扫描整个部署区域,然而,移动信标节点的共线性降低定位的准确性。为了克服 SCAN 路径方案的共线性缺点,沿着 x 和 y 轴两个方向都扫描一遍成为了 DOUBLE SCAN 路径方案。然而,两个方向都扫描付出了路径长度相比较于 SCAN 来说增加了一倍的代价。但路径的长度越长,其能量消耗就会越多,定位所需时间越长。HILBERT 是一种能够不断改变方向,且唯一的扫描整个部署区域的路径。它不仅克服了 SCAN 的共线性缺点,而且相比较与 SCAN 来说也没有增加路径长度。实验结果证明:三种方案都比 RWP 路径定位精度要高。路径分辨率高,SCAN 的定位精度最好。路径分辨率低,HILBERT曲线得定位精度最好。
考虑到现实部署区域的不规则性,很多动态路径方案被提出。未知节点之间通过信息交流并确定锚节点的基本拓扑结构并将其发送给信标节点。根据拓扑结构转化为实现图的遍历问题。