1 PCA
主成分分析法,一般用于数据降维。WHY?
图像中相邻的像素高度相关,输入数据是有一定冗余的。具体来说,假如我们正在训练的16x16灰度值图像,记为一个256维向量 x∈ℜ256,其中特征值 xj对应每个像素的亮度值。由于相邻像素间的相关性,PCA算法可以将输入向量转换为一个维数低很多的近似向量,而且误差非常小。
1.1 PCA实例
数据:
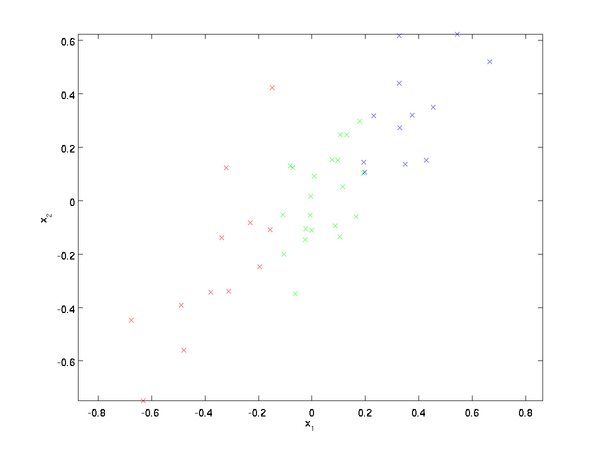
这些数据已经进行了预处理,使得每个特征x1 和 x2 具有相同的均值(零)和方差。PCA算法将寻找一个低维空间来投影我们的数据。从下图中可以看出,u1 是数据变化的主方向,而 u2是次方向。
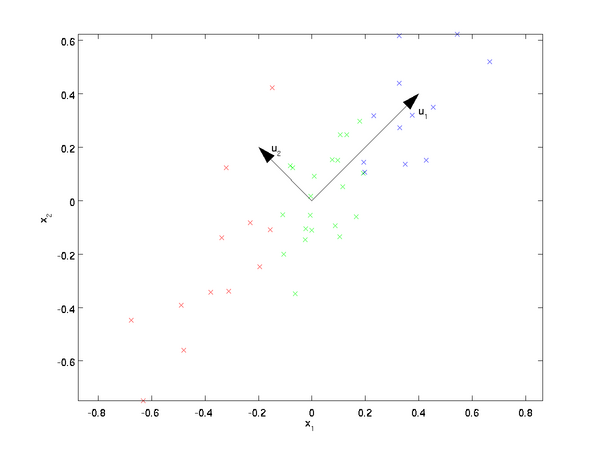
也就是说,数据在u1方向上的变化要比在 u2方向上大。为更形式化地找出方向 u1和u2,我们首先计算出矩阵Σ,如下所示:
Σ=1mm∑i=1(x(i))(x(i))T.
假设x的均值为零,那么Σ就是x的协方差矩阵。可以证明,数据变化的主方向u1就是协方差矩阵Σ的主特征向量,而 u2 是次特征向量。
先计算出协方差矩阵Σ的特征向量,按列排放,而组成矩阵U:
U=[|||u1u2⋯un|||]
此处,u1是主特征向量(对应最大的特征值),u2是次特征向量。以此类推,另记 λ1,λ2,…,λn 为相应的特征值。
在本例中,向量 u1 和u2构成了一个新基,可以用来表示数据。令 x∈ℜ2为训练样本,那么 uT1x 就是样本点 x在维度u1上的投影的长度(幅值)。同样的,uT2x是 x投影到u2维度上的幅值。
1.2 旋转数据
可以把x用(u1,u2)基表达为:
xrot=UTx=[uT1xuT2x]
(下标“rot”来源于单词“rotation”,意指这是原数据经过旋转(也可以说成映射)后得到的结果)。
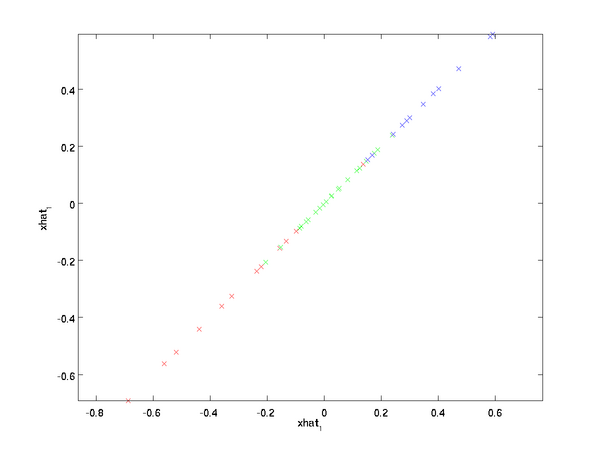
对数据集中的每个样本 i分别进行旋转: x(i)rot=UTx(i)for every i,然后把变换后的数据 xrot显示在坐标图上,可得:
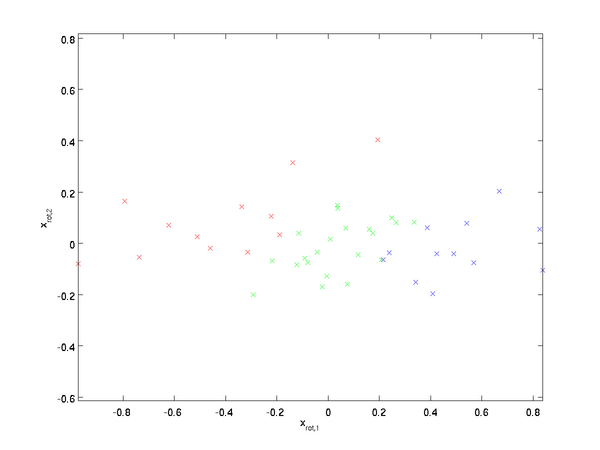
这就是把训练数据集旋转到 u1,u2 基后的结果。一般而言,运算 UTx表示旋转到基 u1,u2,...,un 之上的训练数据。矩阵 U有正交性,即满足 UTU=UUT=I,所以若想将旋转后的向量xrot还原为原始数据x,将其左乘矩阵U即可:x=Uxrot , 验算一下: Uxrot=UUTx=x.
1.3 数据降维
数据的主方向就是旋转数据的第一维 xrot,1 。因此,若想把这数据降到一维,可令:
˜x(i)=x(i)rot,1=uT1x(i)∈ℜ.
更一般的,假如想把数据 x∈ℜn降到 k 维表示 ˜x∈ℜk(令 k<n ),只需选取xrot的前 k个成分,分别对应前k个数据变化的主方向。
PCA的另外一种解释是:xrot是一个 n维向量,其中前几个成分可能比较大(例如,上例中大部分样本第一个成分 x(i)rot,1=uT1x(i)的取值相对较大),而后面成分可能会比较小(例如,上例中大部分样本的 x(i)rot,2=uT2x(i) 较小)。
PCA算法做的其实就是丢弃xrot中后面(取值较小)的成分,就是将这些成分的值近似为零。具体的说,设 ˜x 是 xrot的近似表示,那么将 xrot 除了前k个成分外,其余全赋值为零,就得到:
˜x=[xrot,1⋮xrot,k0⋮0]≈[xrot,1⋮xrot,kxrot,k+1⋮xrot,n]=xrot
在本例中,可得 \textstyle \tilde{x} 的点图如下(取 \textstyle n=2, k=1 ):
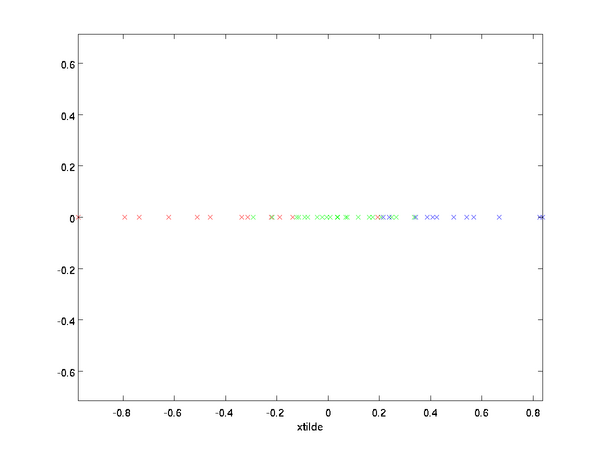
然而,由于上面 \textstyle \tilde{x} 的后\textstyle n-k项均为零,没必要把这些零项保留下来。所以,我们仅用前 \textstyle k 个(非零)成分来定义 \textstyle k 维向量 \textstyle \tilde{x} 。
这也解释了我们为什么会以 \textstyle u_1, u_2, \ldots, u_n 为基来表示数据:要决定保留哪些成分变得很简单,只需取前 \textstyle k 个成分即可。这时也可以说,我们“保留了前 \textstyle k 个PCA(主)成分”。
1.4 还原近似数据
给定 \textstyle \tilde{x} ,我们应如何还原原始数据 \textstyle x 呢?
只需 \textstyle x = U x_{\rm rot} 即可,我们把 \textstyle \tilde{x} 看作将 \textstyle x_{\rm rot} 的最后 \textstyle n-k 个元素被置0所得的近似表示,因此如果给定 \textstyle \tilde{x} \in \Re^k ,可以通过在其末尾添加 \textstyle n-k 个0来得到对 \textstyle x_{\rm rot} \in \Re^n 的近似,最后,左乘 \textstyle U 便可近似还原出原数据 \textstyle x 。具体来说,计算如下:
\hat{x} = U \begin{bmatrix} \tilde{x}_1 \\ \vdots \\ \tilde{x}_k \\ 0 \\ \vdots \\ 0 \end{bmatrix} = \sum_{i=1}^k u_i \tilde{x}_i.
上面的等式基于先前对 \textstyle U 的定义。在实现时,我们实际上并不先给 \textstyle \tilde{x} 填0然后再左乘 \textstyle U ,因为这意味着大量的乘0运算。我们可用 \textstyle \tilde{x} \in \Re^k 来与 \textstyle U 的前 \textstyle k 列相乘,即上式中最右项,来达到同样的目的。将该算法应用于本例中的数据集,可得如下关于重构数据 \textstyle \hat{x} 的点图:
由图可见,我们得到的是对原始数据集的一维近似重构。
在训练自动编码器或其它无监督特征学习算法时,算法运行时间将依赖于输入数据的维数。若用 \textstyle \tilde{x} \in \Re^k 取代 \textstyle x 作为输入数据,那么算法就可使用低维数据进行训练,运行速度将显著加快。对于很多数据集来说,低维表征量 \textstyle \tilde{x} 是原数据集的极佳近似,因此在这些场合使用PCA是很合适的,它引入的近似误差的很小,却可显著地提高你算法的运行速度。
1.5 选择主成分个数
我们该如何选择 \textstyle k ,即保留多少个PCA主成分?在上面这个简单的二维实验中,保留第一个成分看起来是自然的选择。对于高维数据来说,做这个决定就没那么简单:如果 \textstyle k 过大,数据压缩率不高,在极限情况 \textstyle k=n 时,等于是在使用原始数据(只是旋转投射到了不同的基);相反地,如果 \textstyle k 过小,那数据的近似误差太太。
决定 \textstyle k 值时,我们通常会考虑不同 \textstyle k 值可保留的方差百分比。具体来说,如果 \textstyle k=n ,那么我们得到的是对数据的完美近似,也就是保留了100%的方差,即原始数据的所有变化都被保留下来;相反,如果 \textstyle k=0 ,那等于是使用零向量来逼近输入数据,也就是只有0%的方差被保留下来。
一般而言,设 \textstyle \lambda_1, \lambda_2, \ldots, \lambda_n表示 \textstyle \Sigma 的特征值(按由大到小顺序排列),使得 \textstyle \lambda_j 为对应于特征向量 \textstyle u_j 的特征值。那么如果我们保留前 \textstyle k 个成分,则保留的方差百分比可计算为:
\begin{align} \frac{\sum_{j=1}^k \lambda_j}{\sum_{j=1}^n \lambda_j}. \end{align}
在上面简单的二维实验中,\textstyle \lambda_1 = 7.29 ,\textstyle \lambda_2 = 0.69 。因此,如果保留 \textstyle k=1 个主成分,等于我们保留了 \textstyle 7.29/(7.29+0.69) = 0.913 ,即91.3%的方差。
以处理图像数据为例,一个惯常的经验法则是选择 \textstyle k 以保留99%的方差,换句话说,我们选取满足以下条件的最小 \textstyle k 值:
\frac{\sum_{j=1}^k \lambda_j}{\sum_{j=1}^n \lambda_j} \geq 0.99.
对其它应用,如不介意引入稍大的误差,有时也保留90-98%的方差范围。若向他人介绍PCA算法详情,告诉他们你选择的 \textstyle k 保留了95%的方差,比告诉他们你保留了前120个(或任意某个数字)主成分更好理解。
1.6 对图像数据应用PCA算法
为使PCA算法能有效工作,通常我们希望所有的特征 \textstyle x_1, x_2, \ldots, x_n 都有相似的取值范围(并且均值接近于0)。如果你曾在其它应用中使用过PCA算法,你可能知道有必要单独对每个特征做预处理,即通过估算每个特征 \textstyle x_j 的均值和方差,而后将其取值范围规整化为零均值和单位方差。但是,对于大部分图像类型,我们却不需要进行这样的预处理。假定我们将在自然图像上训练算法,此时特征 \textstyle x_j 代表的是像素 \textstyle j 的值。所谓“自然图像”,不严格的说,是指人或动物在他们一生中所见的那种图像。
注:通常我们选取含草木等内容的户外场景图片,然后从中随机截取小图像块(如16x16像素)来训练算法。在实践中我们发现,大多数特征学习算法对训练图片的确切类型并不敏感,所以大多数用普通照相机拍摄的图片,只要不是特别的模糊或带有非常奇怪的人工痕迹,都可以使用。
在自然图像上进行训练时,对每一个像素单独估计均值和方差意义不大,因为(理论上)图像任一部分的统计性质都应该和其它部分相同,图像的这种特性被称作平稳性(stationarity)。
具体而言,为使PCA算法正常工作,我们通常需要满足以下要求:
- 特征的均值大致为0;
- 不同特征的方差值彼此相似。 对于自然图片,即使不进行方差归一化操作,条件也自然满足,故而我们不再进行任何方差归一化操作(对音频数据,如声谱,或文本数据,如词袋向量,我们通常也不进行方差归一化)。
实际上,PCA算法对输入数据具有缩放不变性,无论输入数据的值被如何放大(或缩小),返回的特征向量都不改变。更正式的说:如果将每个特征向量 \textstyle x 都乘以某个正数(即所有特征量被放大或缩小相同的倍数),PCA的输出特征向量都将不会发生变化。
既然我们不做方差归一化,唯一还需进行的规整化操作就是均值规整化,其目的是保证所有特征的均值都在0附近。根据应用,在大多数情况下,我们并不关注所输入图像的整体明亮程度。比如在对象识别任务中,图像的整体明亮程度并不会影响图像中存在的是什么物体。更为正式地说,我们对图像块的平均亮度值不感兴趣,所以可以减去这个值来进行均值规整化。
具体的步骤是,如果 \textstyle x^{(i)} \in \Re^{n} 代表16x16的图像块的亮度(灰度)值( \textstyle n=256 ),可用如下算法来对每幅图像进行零均值化操作:
\mu^{(i)} := \frac{1}{n} \sum_{j=1}^n x^{(i)}_j
x^{(i)}_j := x^{(i)}_j - \mu^{(i)}, for all \textstyle j
请注意:1)对每个输入图像块\textstyle x^{(i)} 都要单独执行上面两个步骤,2)这里的 \textstyle \mu^{(i)} 是指图像块 \textstyle x^{(i)} 的平均亮度值。尤其需要注意的是,这和为每个像素 \textstyle x_j 单独估算均值是两个完全不同的概念。
如果你处理的图像并非自然图像(比如,手写文字,或者白背景正中摆放单独物体),其他规整化操作就值得考虑了,而哪种做法最合适也取决于具体应用场合。但对自然图像而言,对每幅图像进行上述的零均值规整化,是默认而合理的处理。
1.7 PCA 的理论基础
- 最大投影方差理论
- 最小投影距离
- 坐标轴相关度理论
最大方差理论:主成分分析认为,沿某特征分布的数据的方差越大,则该特征所包含的信息越多,也就是所谓的主成分。 其实也就是样本投影后间隔较大,容易区分。
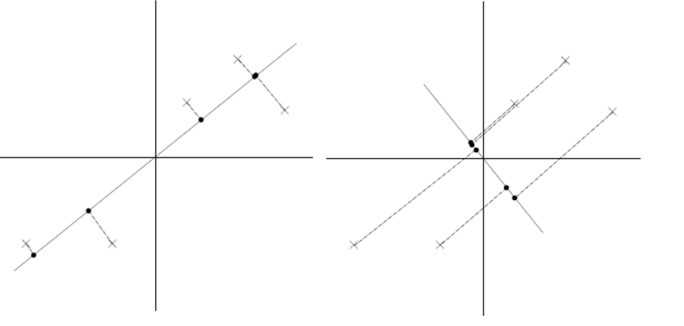
最小错误理论:选择投影后误差最小的直线。
方差:

\lambda = \frac{1}{m}\sum_{i=1}^{m}(x^{(i)^T}u)^2,
\Sigma=\frac{1}{m}\sum_{i=1}^{m}x^{(i)}x^{(i)^T}
\lambda = \mu ^{\tau }\sum \mu
上式两边痛乘以 u,得到:
\mu\lambda = \sum \mu
由此可知:\lambda是\sum的特征值,\mu是特征向量
最佳投影直线就是特征值 λ 最大是对应的特征向量,其中 λ 就是我们的方差,也对应了我们前面的最大方差理论,也就是找到能够使投影后方差最大的直线。
2 白化
白化,又称漂白或者球化;是对原始数据x实现一种变换,使x_Whitened的协方差矩阵的为单位阵。
由于原始图像相邻像素值具有高度相关性,所以图像数据信息冗余,对于白化的作用的描述主要有两个方面:
- 减少特征之间的相关性
- 特征具有相同的方差(协方差阵为1)
2.1 PCA白化
PCA
为了使每个输入特征具有单位方差,我们可以直接使用 \textstyle 1/\sqrt{\lambda_i} 作为缩放因子来缩放每个特征 \textstyle x_{{\rm rot},i} 。具体地,我们定义白化后的数据 \textstyle x_{{\rm PCAwhite}} \in \Re^n 如下:
x_{{\rm PCAwhite},i} = \frac{x_{{\rm rot},i} }{\sqrt{\lambda_i}}.
绘制出 \textstyle x_{{\rm PCAwhite}} ,得到:
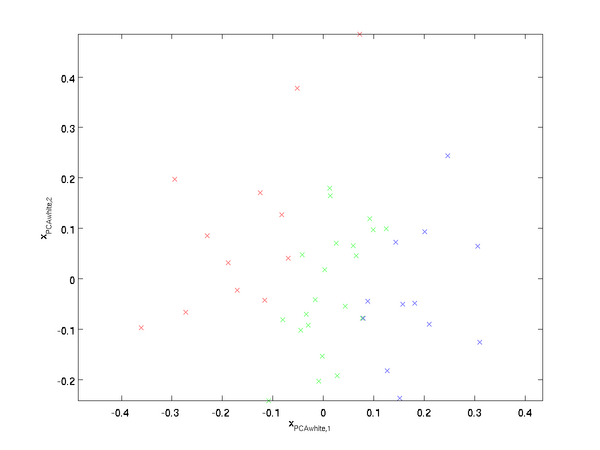
这些数据现在的协方差矩阵为单位矩阵 \textstyle I 。我们说,\textstyle x_{{\rm PCAwhite}} 是数据经过PCA白化后的版本: \textstyle x_{{\rm PCAwhite}} 中不同的特征之间不相关并且具有单位方差。
白化与降维相结合。 如果想要得到经过白化后的数据,并且比初始输入维数更低,可以仅保留 \textstyle x_{{\rm PCAwhite}} 中前\textstyle k 个成分。\textstyle x_{{\rm PCAwhite}} 中最后的少量成分将总是接近于0,因而舍弃这些成分不会带来很大的问题。
2.2 ZCA 白化
使数据的协方差矩阵变为单位矩阵 \textstyle I 的方式并不唯一。具体地,如果 \textstyle R 是任意正交矩阵,即满足 \textstyle RR^T = R^TR = I (说它正交不太严格,\textstyle R 可以是旋转或反射矩阵), 那么 \textstyle R \,x_{\rm PCAwhite} 仍然具有单位协方差。在ZCA白化中,令 \textstyle R = U 。我们定义ZCA白化的结果为:
x_{\rm ZCAwhite} = U x_{\rm PCAwhite}
绘制 \textstyle x_{\rm ZCAwhite},得到:
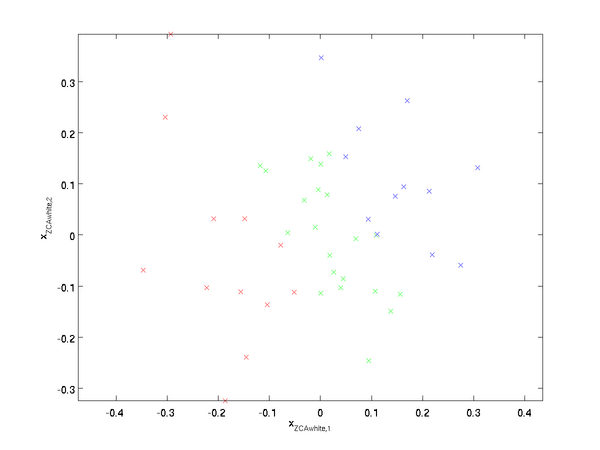
对所有可能的 \textstyle R,这种旋转使得\textstyle x_{\rm ZCAwhite} 尽可能地接近原始输入数据 \textstyle x 。
当使用 ZCA白化时(不同于 PCA白化),通常保留数据的全部\textstyle n 个维度,不尝试去降低它的维数。
2.3 正则化
实践中需要实现PCA白化或ZCA白化时,有时一些特征值 \textstyle \lambda_i 在数值上接近于0,这样在缩放步骤时我们除以\sqrt{\lambda_i} 将导致除以一个接近0的值;这可能使数据上溢 (赋为大数值)或造成数值不稳定。因而在实践中,我们使用少量的正则化实现这个缩放过程,即在取平方根和倒数之前给特征值加上一个很小的常数 \textstyle \epsilon:
x_{{\rm PCAwhite},i} = \frac{x_{{\rm rot},i} }{\sqrt{\lambda_i + \epsilon}}.
当 \textstyle x 在区间 \textstyle [-1,1] 上时, 一般取值为 \textstyle \epsilon \approx 10^{-5}。
对图像来说, 这里加上 \textstyle \epsilon ,对输入图像也有一些平滑(或低通滤波)的作用。这样处理还能消除在图像的像素信息获取过程中产生的噪声,改善学习到的特征。
ZCA 白化是一种数据预处理方法,它将数据从 \textstyle x 映射到 \textstyle x_{\rm ZCAwhite} 。 事实证明这也是一种生物眼睛(视网膜)处理图像的粗糙模型。具体而言,当你的眼睛感知图像时,由于一幅图像中相邻的部分在亮度上十分相关,大多数临近的“像素”在眼中被感知为相近的值。因此,如果人眼需要分别传输每个像素值(通过视觉神经)到大脑中,会非常不划算。取而代之的是,视网膜进行一个与ZCA中相似的去相关操作 (这是由视网膜上的ON-型和OFF-型光感受器细胞将光信号转变为神经信号完成的)。由此得到对输入图像的更低冗余的表示,并将它传输到大脑。
3 LDA
4 SVD
5 KPCA
核函数的主成分分析和主成分分析的步骤是一样的,只不过用核函数替代了原来的数据。
6 ICA
4 总结
PCA (基于最大投影方差降维) –> 白化:方差归一化 –> ZCA (方差归一化-不降维度-返回原来)