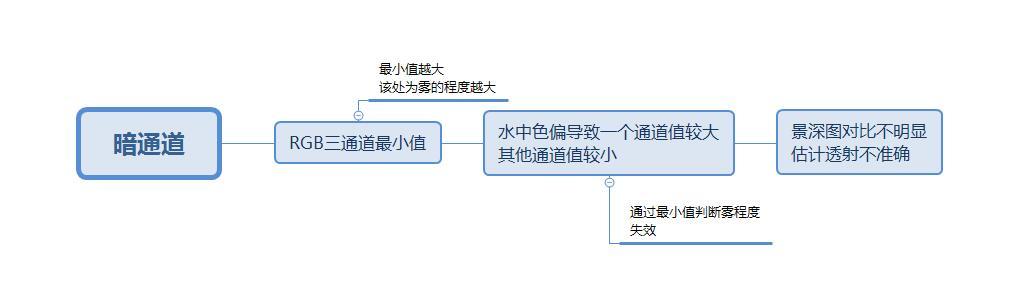
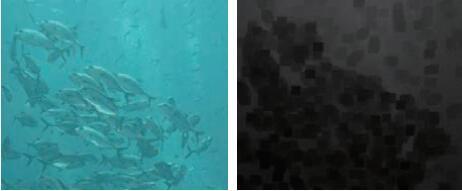
1.经典的DCP原程序水下图像恢复效果较差
,甚至几乎没有恢复效果
原因:水下图像存在蓝色色偏或者绿色色偏,此时其他通道的值都较小,当使用暗通道直接求景深图时
2.其他经过DCP改进的算法
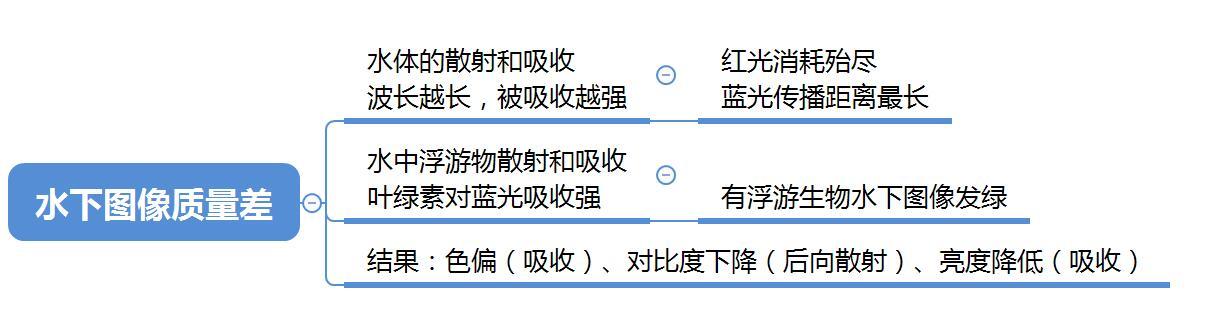
3.水体光学作用
4.既然色偏,我们的DCP就不太适用了
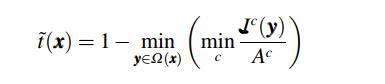
那么我们用最亮的通道(均值最大的通道)-最暗的通道(均值最小的通道),得到深度图,取反乘以调节因子得到透射图!
这个的科学依据:由于水下的吸收作用,传播距离越远,吸收效果越明显,因此用一个不太被吸收的通道-一个被急剧吸收的通道的值是可以估算深度的(也就是传播距离)。
5.A为水体背景颜色估计
在水下,我们不应该直接按照DCP直接取亮度的前0.1%作为A的估计,因为这很有可能把光照亮的地方或者物体近的地方估计成为水体。我们可以知道,我们拍摄到的水体背景应该是无穷远的,因此我们可以从景深图的前0.1%来去A,这个对应到原图该点的三通道均值作为A。
由公式可以看出,透射率越低,A所占的比重越大。那么哪些地方透射率低呢?离着拍摄位置越远,透射率越低,水下拍摄,只有水的散射时,可以认为距离是无穷远的。因此当我们所求得的A满足这种关系时,我们求得的A就是我们需要的A。
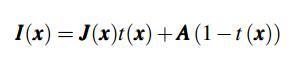
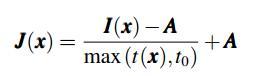
6.
通过这个公式我们就可以求出我们的透射率
7.这个公式还有几处添加项(这里非常不理解,何凯明前辈已经在自己的论文中指出了这些添加项,但是很多人在用这些时都会莫名其妙地认为是自己想出来的…………)
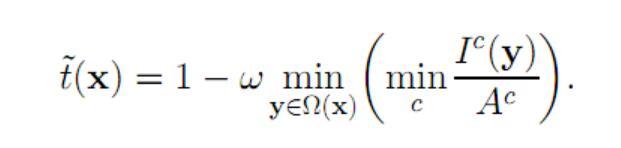
添加项ω
这里的ω一般取0.95,这一项主要目的是避免雾被全部去掉,因为真实场景中,我们判断物体的远近关系很多情况下是通过淡雾来判断的,这也就是远处的模糊近处的清晰的原因。
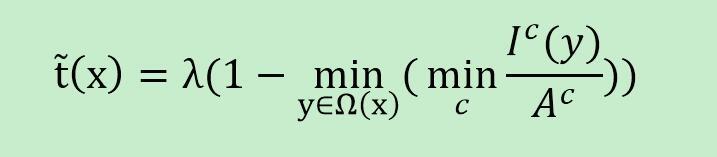
添加项λ
这里的λ可以调节透射图的亮度,当图像整体偏亮时,调小λ可以使处理结果的得到改善。
添加项t0
限制t(x)的范围,使得t(x)不能无限地小。防止增强后的图像过亮。
8.颜色校正算法对图像作处理

ymin是c通道,颜色最大的值。该方程的意义是消除两个区域,原图在255左边有一段区域没有信息,在0右边一段区域没有信息。通过该公式可以使图像的最亮和最暗都有信息,有暗部和亮部的图片,才是正常的图片。
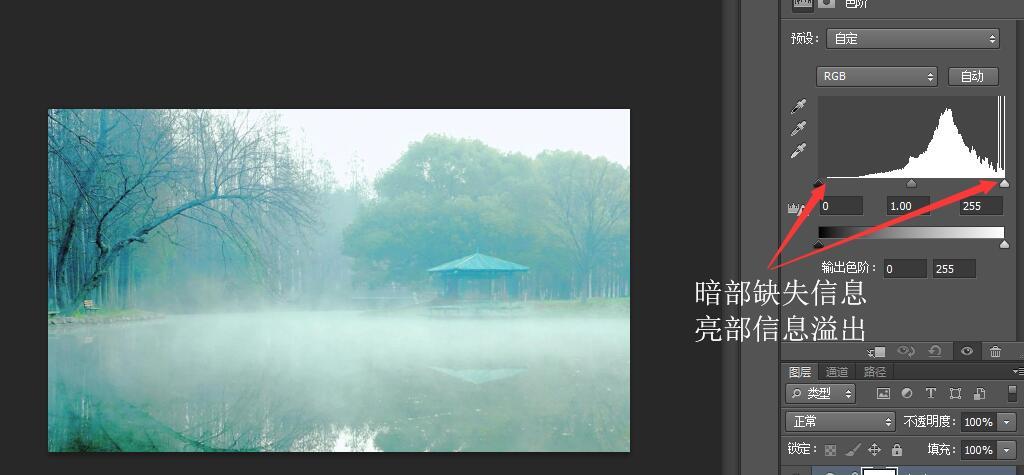
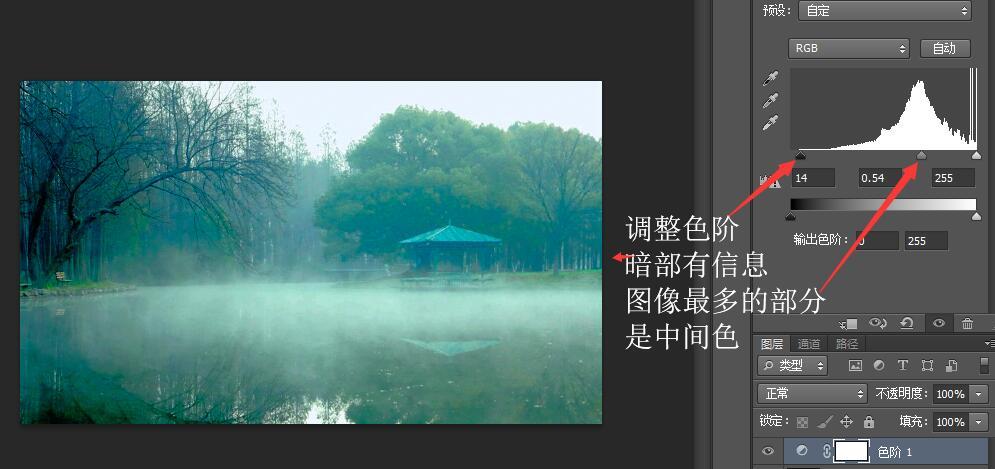
有点像P图了,其实就是这样的,原理一模一样。
9.恢复效果的评测
MSE(均方误差)、UCIQE(增强程度进行评价)、SSIM(失真程度的评价指标)
这些网上都有解释和完备程序
MSE评价信号中噪声大小的指标(所有点的均方误差累加):

SSIM为结构相似度算法,算法人为图像由结构信息、亮度信息和对比度信息组成,三种信息相互独立。SSIM越进阶于1,相似度越高。
2018/07/10本博客参考
基于改进 DCP 算法的水下机器人视觉增强—汤忠强