简介
要想使用OpenCV实现人脸的实时检测与追踪,首先要搭建好OpenCV的环境,这里有在Xcode下搭建OpenCV的教程:
http://blog.csdn.net/qq_32925781/article/details/53590249
其他环境下的自行百度。
代码
下面上代码:
#include "opencv2/opencv.hpp"
#include <iostream>
using namespace std;
using namespace cv;
void detectAndDraw( Mat& img, CascadeClassifier& cascade,
CascadeClassifier& nestedCascade,
double scale, bool tryflip );
int main()
{
VideoCapture cap(0); //打开默认摄像头
if(!cap.isOpened())
{
cout<<"Can not open the camera!"<<endl;
return -1;
}
Mat frame;
Mat edges;
//CascadeClassifier是Opencv中做人脸检测的时候的一个级联分类器
CascadeClassifier cascade, nestedCascade;
//加载级联分类器
cascade.load("/Users/.../opencv-3.1.0/data/haarcascades/haarcascade_frontalface_alt.xml");
nestedCascade.load("/Users/.../opencv-3.1.0/data/haarcascades/haarcascade_eye_tree_eyeglasses.xml");
while(true)
{
cap>>frame;
//对画面进行一定的缩放,方便处理
double scale = 1.2; //缩放比例
Mat smallImg(frame.rows / scale,frame.cols / scale,CV_8SC1);
resize(frame, frame, smallImg.size(),0,0,INTER_LINEAR);
detectAndDraw( frame, cascade, nestedCascade,2,0 );
int key;
key = waitKey(10);
if (key == 'q' || key == 'Q' || key == 27)
break;
}
return 0;
}
void detectAndDraw( Mat& img, CascadeClassifier& cascade,
CascadeClassifier& nestedCascade,
double scale, bool tryflip )
{
int i = 0;
double t = 0;
//建立用于存放人脸的向量容器
vector<Rect> faces, faces2;
//定义一些颜色,用来标示不同的人脸
const static Scalar colors[] = { CV_RGB(0,0,255),
CV_RGB(0,128,255),
CV_RGB(0,255,255),
CV_RGB(0,255,0),
CV_RGB(255,128,0),
CV_RGB(255,255,0),
CV_RGB(255,0,0),
CV_RGB(255,0,255)} ;
//建立缩小的图片,加快检测速度
//nt cvRound (double value)对一个double型的数进行四舍五入,并返回一个整型数!
Mat gray, smallImg(cvRound(img.rows/scale), cvRound(img.cols/scale), CV_8UC1 );
//转成灰度图像,Harr特征基于灰度图
cvtColor( img, gray, CV_BGR2GRAY );
//改变图像大小,使用双线性差值
resize( gray, smallImg, smallImg.size(), 0, 0, INTER_LINEAR );
//变换后的图像进行 直方图均值化 处理,可以增强对比度
equalizeHist( smallImg, smallImg );
//程序开始和结束插入此函数获取时间,经过计算求得算法执行时间
t = (double)cvGetTickCount();
//检测人脸
//detectMultiScale函数中smallImg表示的是要检测的输入图像为smallImg,faces表示检测到的人脸目标序列
//每次图像尺寸减小的比例为1.1 (默认值),2表示每一个目标至少要被检测到2次才算是真的目标(因为周围的像素和不同的窗口大小都可以检测到人脸)
//CV_HAAR_DO_CANNY_PRUNING:利用Canny边缘检测器来排除一些边缘很少或者很多的图像区域,CV_HAAR_SCALE_IMAGE:按比例正常检测,CV_HAAR_FIND_BIGGEST_OBJECT:只检测最大的物,CV_HAAR_DO_ROUGH_SEARCH:初略检测。
//CV_HAAR_SCALE_IMAGE表示不是缩放分类器来检测,而是缩放图像,Size(30, 30)为目标的最小最大尺寸
cascade.detectMultiScale( smallImg, faces,
1.1, 3, 0
//|CV_HAAR_FIND_BIGGEST_OBJECT
//|CV_HAAR_DO_ROUGH_SEARCH
|CV_HAAR_SCALE_IMAGE
,
Size(30, 30));
//如果能,翻转图像继续检测
if( tryflip )
{
flip(smallImg, smallImg, 1);
cascade.detectMultiScale( smallImg, faces2,
1.1, 2, 0
//|CV_HAAR_FIND_BIGGEST_OBJECT
//|CV_HAAR_DO_ROUGH_SEARCH
|CV_HAAR_SCALE_IMAGE
,Size(30, 30) );
for( vector<Rect>::const_iterator r = faces2.begin(); r != faces2.end(); r++ )
{
faces.push_back(Rect( r->x , r->y, r->width, r->height));
//c.push_back(X)将元素X加入到c容器的最后一位
}
}
t = (double)cvGetTickCount() - t;
// qDebug( "detection time = %g ms\n", t/((double)cvGetTickFrequency()*1000.) );
for( vector<Rect>::const_iterator r = faces.begin(); r != faces.end(); r++, i++ )
{
Mat smallImgROI;
vector<Rect> nestedObjects;
Point center;
Scalar color = colors[i%8];
int radius;
double aspect_ratio = (double)r->width/r->height;
if( 0.75 < aspect_ratio && aspect_ratio < 1.3 )
{
//标示人脸时在缩小之前的图像上标示,所以这里根据缩放比例换算回去
center.x = cvRound((r->x + r->width*0.5)*scale);
center.y = cvRound((r->y + r->height*0.5)*scale);
radius = cvRound((r->width + r->height)*0.25*scale);
circle( img, center, radius, color, 3, 8, 0 );
}
else
rectangle( img, cvPoint(cvRound(r->x*scale), cvRound(r->y*scale)),
cvPoint(cvRound((r->x + r->width-1)*scale), cvRound((r->y + r->height-1)*scale)),
color, 3, 8, 0);
if( nestedCascade.empty() )
continue;
}
cv::imshow( "result", img );
}下面上效果图:
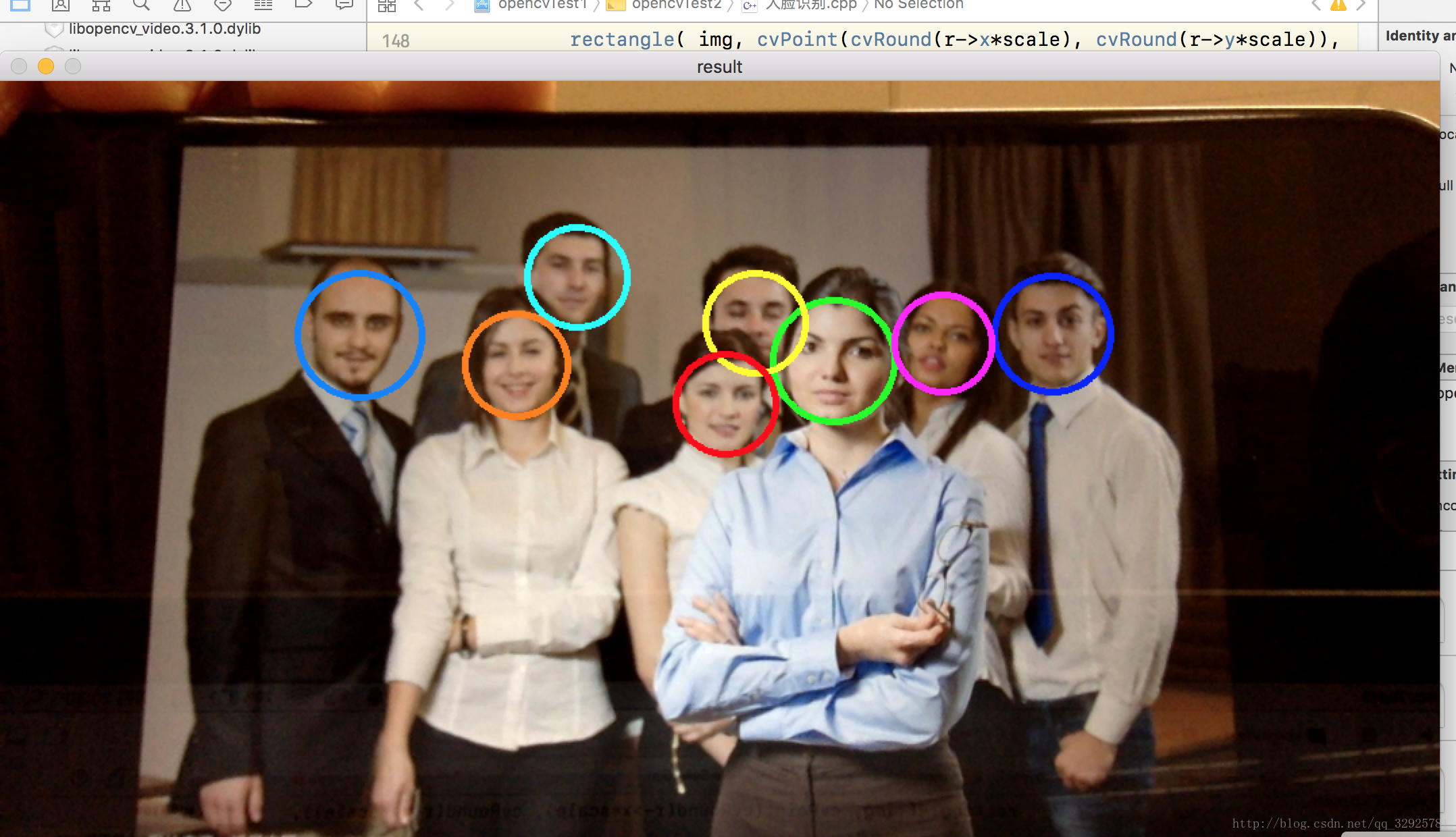
这里为了不让我的脸出镜,就用手机里的图片让摄像头识别了。