最近公司的项目用到了recast做服务端寻路,自己在使用的过程中对其如何实现网格寻路很感兴趣,根据需要研读过部分实现代码,同时也发现网上关于源码分析方面的资料较少,因此这里打算写成一组系列做个总结。本文是针对recast中的一个射线方法(InputGeom::raycastMesh),结合代码探讨其实现原理,并在此过程中穿插相应数学解释。
recast简介
说到寻路,主流的地形建模方法有三种:grid(方格)、waypoint(路点)和navmesh(导航网格)(参见《游戏人工智能:寻找一个空间寻路表征》)。而recast就是使用navmesh作为模型的一个应用广泛、功能强大的开源项目(项目地址),它支持建网格、寻路、添加动态障碍、群体寻路等诸多特性,并在unity和unreal等著名引擎上都有应用。
核心问题:射线与网格求交点
recast主要分为两部分:recast(建网格)和detour(寻路)。虽然在过程中涉及到复杂的数据结构和数学原理,但是这里只针对其中一个特性:射线与navmesh求交点,探讨其实现原理。具体的应用场景有:
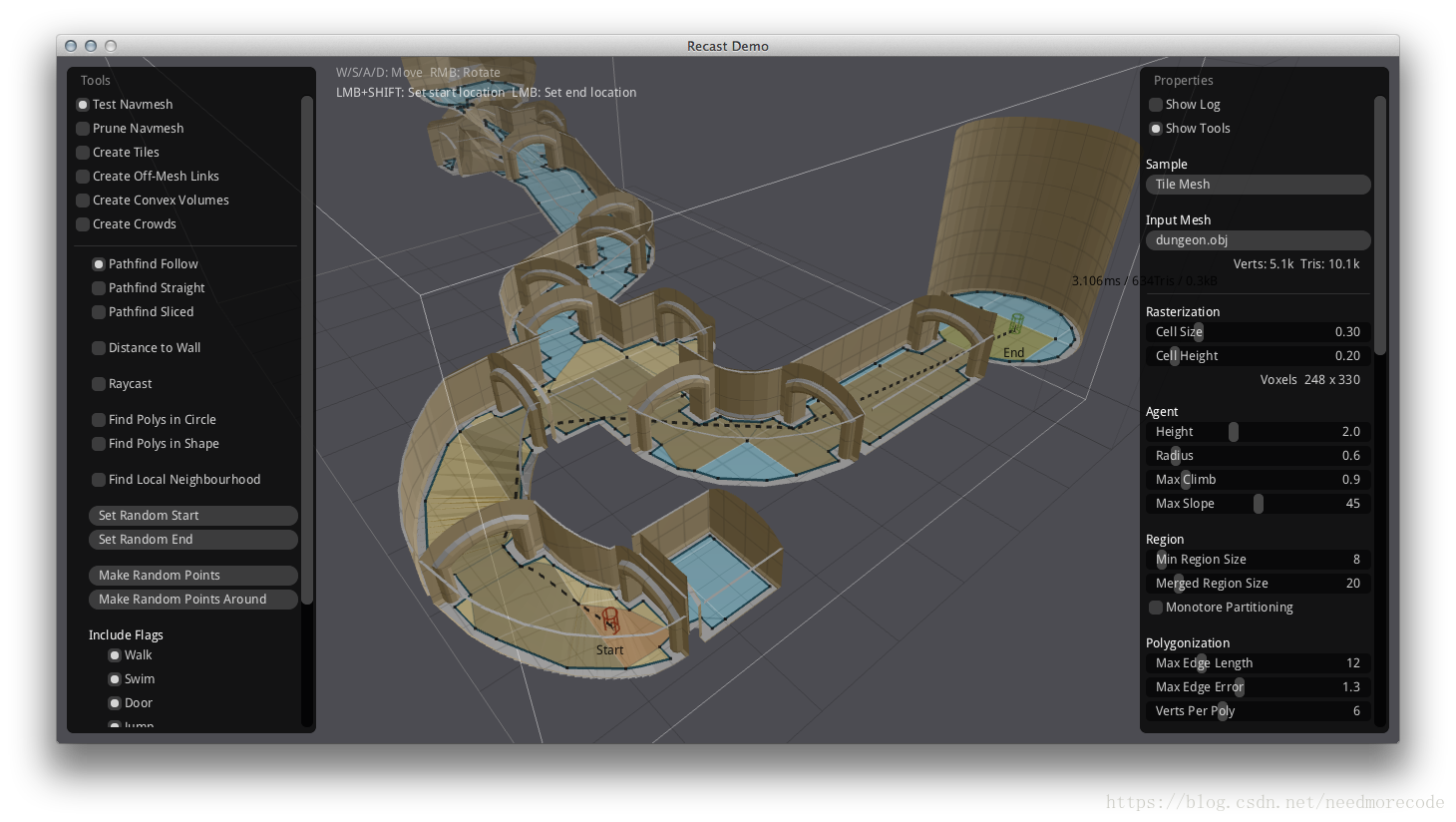
- 在recast官方的demo中,根据屏幕点击位置确定寻路的起点和终点坐标
强烈推荐一下这个demo,它的功能非常强大,以可视化的方法展示了recast提供的几乎所有功能。在寻路的过程中,通过鼠标点击即可设置起止点,这过程中就是用到射线来求取真实世界里的坐标。 - 在服务器寻路中,根据x和z坐标求取y坐标(地表高度)
这是在项目中遇到的实际需求:recast的寻路函数需要传起止点的xyz坐标,x和z坐标可以在服务端保存,而y坐标我们不希望从客户端取(涉及到离线和反外挂的问题),而是通过服务端的地形数据实时算出。
下面我们就应用场景1的需求,结合源码来做一下实现细节上的分析。
源码解析
首先,将射线的起点取成屏幕点击点,终点取成起点的深度(z坐标)加1,这样射线与navmesh的交点就认为是要设置的起点或终点。然后,在main.cpp中通过opengl的方法将鼠标点击的屏幕坐标转成世界坐标:
// Get hit ray position and direction.
GLdouble x, y, z;
gluUnProject(mousePos[0], mousePos[1], 0.0f, modelviewMatrix, projectionMatrix, viewport, &x, &y, &z);
rayStart[0] = (float)x;
rayStart[1] = (float)y;
rayStart[2] = (float)z;
gluUnProject(mousePos[0], mousePos[1], 1.0f, modelviewMatrix, projectionMatrix, viewport, &x, &y, &z);
rayEnd[0] = (float)x;
rayEnd[1] = (float)y;
rayEnd[2] = (float)z;接下来将起点、终点坐标rayStart和rayEnd传入如下函数:
bool InputGeom::raycastMesh(float* src, float* dst, float& tmin)
{
float dir[3];
rcVsub(dir, dst, src);
// Prune hit ray.
float btmin, btmax;
if (!isectSegAABB(src, dst, m_meshBMin, m_meshBMax, btmin, btmax))
return false;
float p[2], q[2];
p[0] = src[0] + (dst[0]-src[0])*btmin;
p[1] = src[2] + (dst[2]-src[2])*btmin;
q[0] = src[0] + (dst[0]-src[0])*btmax;
q[1] = src[2] + (dst[2]-src[2])*btmax;
int cid[512];
const int ncid = rcGetChunksOverlappingSegment(m_chunkyMesh, p, q, cid, 512);
if (!ncid)
return false;
tmin = 1.0f;
bool hit = false;
const float* verts = m_mesh->getVerts();
for (int i = 0; i < ncid; ++i)
{
const rcChunkyTriMeshNode& node = m_chunkyMesh->nodes[cid[i]];
const int* tris = &m_chunkyMesh->tris[node.i*3];
const int ntris = node.n;
for (int j = 0; j < ntris*3; j += 3)
{
float t = 1;
if (intersectSegmentTriangle(src, dst,
&verts[tris[j]*3],
&verts[tris[j+1]*3],
&verts[tris[j+2]*3], t))
{
if (t < tmin)
tmin = t;
hit = true;
}
}
}
return hit;
}
isectSegAABB函数的作用是修剪射线:它将整个navmesh看成是一个AABB包围盒,判断射线和包围盒是否有交集;若没有则直接return;否则将射线不在盒内的部分修剪掉。
将下来通过rcGetChunksOverlappingSegment函数求取二维平面下与射线有交集的所有trimesh node(三角网格节点)(只考虑x、z坐标)。这一步算是粗筛,因为不涉及点乘差乘等耗时运算,执行效率较高。相关代码如下:
int rcGetChunksOverlappingSegment(const rcChunkyTriMesh* cm,
float p[2], float q[2],
int* ids, const int maxIds)
{
// Traverse tree
int i = 0;
int n = 0;
while (i < cm->nnodes)
{
const rcChunkyTriMeshNode* node = &cm->nodes[i];
const bool overlap = checkOverlapSegment(p, q, node->bmin, node->bmax);
const bool isLeafNode = node->i >= 0;
if (isLeafNode && overlap)
{
if (n < maxIds)
{
ids[n] = i;
n++;
}
}
if (overlap || isLeafNode)
i++;
else
{
const int escapeIndex = -node->i;
i += escapeIndex;
}
}
return n;
}检查方法checkOverlapSegment是将node看成AABB包围盒,通过比较射线起止点p、q与包围盒的x、z坐标的相对位置。若存在overlap,则还要判断node是否为叶子节点。这里recast为trimesh node建立的模型是一个树状结构,从根节点出发管理到大的区块,再到小的区块,直至一个基础node作为叶子节点。叶子节点是通过node的属性i来判断,若i小于0代表叶子节点,可以将这个node加入返回数组中;否则判断下一个。注意这里选取下一个的时候有个分支优化:若既没有overlap,又不是叶节点,则放弃当前节点下面的所有子孙节点,直接跳转到通过属性i计算出的下一个节点索引处。
通过上面这一步可以排除掉绝大多数节点。下面只需要对剩余的若干个trimesh node做精选,判断射线是否与它们存在交点。这实际是分两步:一是求射线与三角形所在平面的交点,二是判断交点是否在三角形内部。这是在如下函数中处理的:
static bool intersectSegmentTriangle(const float* sp, const float* sq,
const float* a, const float* b, const float* c,
float &t)
{
float v, w;
float ab[3], ac[3], qp[3], ap[3], norm[3], e[3];
rcVsub(ab, b, a);
rcVsub(ac, c, a);
rcVsub(qp, sp, sq);
// Compute triangle normal. Can be precalculated or cached if
// intersecting multiple segments against the same triangle
rcVcross(norm, ab, ac);
// Compute denominator d. If d <= 0, segment is parallel to or points
// away from triangle, so exit early
float d = rcVdot(qp, norm);
if (d <= 0.0f) return false;
// Compute intersection t value of pq with plane of triangle. A ray
// intersects iff 0 <= t. Segment intersects iff 0 <= t <= 1. Delay
// dividing by d until intersection has been found to pierce triangle
rcVsub(ap, sp, a);
t = rcVdot(ap, norm);
if (t < 0.0f) return false;
if (t > d) return false; // For segment; exclude this code line for a ray test
// Compute barycentric coordinate components and test if within bounds
rcVcross(e, qp, ap);
v = rcVdot(ac, e);
if (v < 0.0f || v > d) return false;
w = -rcVdot(ab, e);
if (w < 0.0f || v + w > d) return false;
// Segment/ray intersects triangle. Perform delayed division
t /= d;
return true;
}这是一个纯粹的数学问题:设P、Q为射线的起止点,三角形的三个顶点分别为A、B、C,我们得到如下的几何模型:

程序先求三角形所在平面的法向量
,再用叉乘将
、
分别映射到
所在方向,分别得到高度t和d,若t>d,则射线PQ肯定与平面没有交点,直接return。
接下来再判断交点是否在三角形内部。这里要用到的一个概念叫做质心坐标系(不明白的可以百度)。大概意思就是三角形ABC所在平面的点可以表示成:
而三角形内部的点必定满足:
和
都在(0,1)范围内。
通过这个性质,再加一系列的方程计算和矩阵变换可以判断出交点是否在三角形内部(演算过程这里略过,具体可看《空间中直线段和三角形的相交算法》,说得很详细了)。若不在则直接return,否则将t/d作为返回值传出,后面会用来求取最终的交点坐标。
接下来重新回到InputGeom::raycastMesh函数中,可以看到若射线与多个trimesh node相交,会选择最先遇到的交点:
for (int j = 0; j < ntris*3; j += 3)
{
float t = 1;
if (intersectSegmentTriangle(src, dst,
&verts[tris[j]*3],
&verts[tris[j+1]*3],
&verts[tris[j+2]*3], t))
{
if (t < tmin)
tmin = t;
hit = true;
}
}最后回到main.cpp中,根据上面return的t与d的比例关系,求取最终的交点坐标:
float pos[3];
pos[0] = rayStart[0] + (rayEnd[0] - rayStart[0]) * hitTime;
pos[1] = rayStart[1] + (rayEnd[1] - rayStart[1]) * hitTime;
pos[2] = rayStart[2] + (rayEnd[2] - rayStart[2]) * hitTime;至此大功告成。
遇到的一些坑
本人因项目需要,使用的是recast的Java版本(项目地址)。它的大部分api和实现与原版(C++)一致,不过也存在少数细节差异,导致使用过程中遇到了一些坑。如Java版的SimpleInputGeomProvider.meshes()方法是调用时才根据地形数据实时生成所有的trimesh node,这一点非常耗时;而原版是加载地形数据时就生成了,后面直接用缓存。因此在项目中参照原版对这点做了优化。
小结
这里讨论的只是recast的一个非常小的功能:射线与mesh求交点;它本质上等价为一个数学问题:线段与三角形求交点,通过阅读源码和分析,我们看到不少空间几何数学知识的运用。同时为了性能考虑,recast通过很多独具匠心的小细节加速了求解过程。希望本文能给recast的使用者一些参考。