原链接: https://community.bwbot.org/topic/508
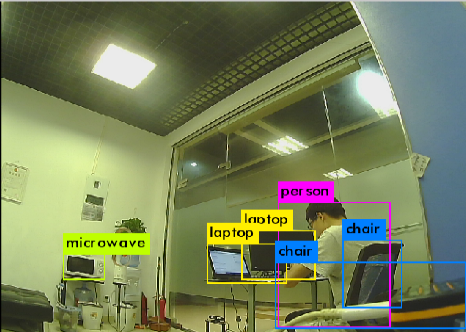
物体识别是指讲图片中的物体识别出来,包括物体的位置和类别。
以下面的图片为例
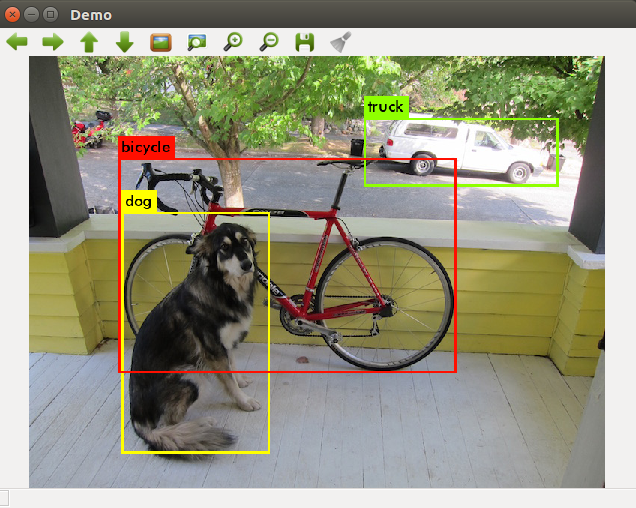
可以看出程序成功找出了图片中的自行车,狗和卡车。
Yolo是一个很高效的物体识别程序,在有Nvida GPU和CUDA的情况下可以做到实时处理。由于小强没有Nvidia GPU,只能采用CPU运行,速度会比较慢。下面是安装和使用方法。
下载和编译程序
cd [到你的工作空间]/src
git clone --recursive https://github.com/BluewhaleRobot/darknet_ros
cd ..
catkin_make -DCMAKE_BUILD_TYPE=Release等待编译完成。注意编译过程中要有网络连接。程序会在编译的时候自动从网络下载yolo的训练模型数据。
参数配置
主要的参数位于ros.yaml
其中 camera_reading topic是图像的接收话题,小强上设置为/camera_node/image_raw就可以了。
默认启动程序后会有一个显示图像的窗口,如果不想打开可以设置 enable_opencv 为 false
默认Yolo的输出会在终端显示,可以通过设置enable_console_output false 禁用。
运行程序
roslaunch darknet_ros yolo_v3.launch 一切正常就可以看到输出的图像了