转载请注明出处:http://blog.csdn.net/chengcheng1394/article/details/77817194
本程序使用SeetaFaceEngine和cv2.CascadeClassifier做人脸识别,然后利用VGG模型做人脸特征的比较。
代码下载地址:
https://github.com/chengstone/FindFaceInVideo
https://github.com/chengstone/SeetaFaceEngine
先上效果图:



视频中找人的效果在GitHub项目文件夹out中:https://github.com/chengstone/FindFaceInVideo/tree/master/VGGFace/out。
思路是这样的,目的是要在给定图片或者视频中找人,核心要解决的就是两件事,一个是人脸的识别,一个是人脸特征的比较。相似度越高,那么就意味着人找到了。
0、环境搭建
1、人脸识别
人脸识别实现的选择,我本想使用卷积神经网络训练出人脸识别的模型,输出人脸的位置,但是发现训练的效果不理想,只好换方案了。
最终我使用了SeetaFaceEngine的实现方案,原项目地址:https://github.com/seetaface/SeetaFaceEngine。
只使用其中的FaceDetection和FaceAlignment,其中FaceAlignment/src/test/face_alignment_test.cpp做了修改,下面会大致说下改动。修改后的项目地址:https://github.com/chengstone/SeetaFaceEngine
核心代码逻辑:FaceDetection负责人脸位置的识别,FaceAlignment进行人脸对齐(仿射变换),将对齐后的人脸图片保存,作为后续人脸特征比较时使用。
核心代码:
seeta::FaceDetection detector("seeta_fd_frontal_v1.0.bin");
bool procFaceImage(string fullpath, string path, string filename, string ext, string dst_path, string in_size)
{
// 人脸识别模型初始化
detector.SetMinFaceSize(40);
detector.SetScoreThresh(2.f);
detector.SetImagePyramidScaleFactor(0.8f);
detector.SetWindowStep(4, 4);
// 人脸对齐模型初始化
seeta::FaceAlignment point_detector((MODEL_DIR + "seeta_fa_v1.1.bin").c_str());
//加载参数传入的图像,灰度图,用于人脸识别
IplImage *img_grayscale = NULL;
img_grayscale = cvLoadImage(/*(DATA_DIR + "image_0001.jpg")*/fullpath.c_str(), 0);
if (img_grayscale == NULL)
{
printf("%s\n", fullpath.c_str());
printf("[0]img_grayscale == NULL\n");
return false;
}
//缩小尺寸过大的图像,如果图像像素太大的话,会影响识别效果。
IplImage *outImg = NULL;
while(img_grayscale->width > 1024 + 1024 || img_grayscale->height > 768 + 512 ){
outImg = cvCreateImage(cvSize(img_grayscale->width / 2, img_grayscale->height / 2),
img_grayscale->depth,
img_grayscale->nChannels);
cvPyrDown(img_grayscale, outImg);
img_grayscale = outImg;
}
//调用FaceDetection做人脸识别,支持一张图多个人脸
printf("detectFace now!\n");
seeta::ImageData image_data;
std::vector<seeta::FaceInfo> faces = detectFace(img_grayscale, &image_data);
if (faces.size() == (0)) {
printf("[1]detectFace error!\n");
return false;
}
printf("face number = %d\n",faces.size());
printf("PointDetectLandmarks now!\n");
//准备好要保存的位置和文件名
string result_path = (/*path*/dst_path + "/" + filename + "_result." + ext);
// Detect 5 facial landmarks
seeta::FacialLandmark points[5];
//又一次加载参数传入的图像,彩色图,大图缩减
{
IplImage *img_color = cvLoadImage(/*(DATA_DIR + "image_0001.jpg")*/fullpath.c_str(), 1);
while(img_color->width > 1024 + 1024 || img_color->height > 768 + 512 ){
outImg = cvCreateImage(cvSize(img_color->width / 2, img_color->height / 2),
img_color->depth,
img_color->nChannels);
cvPyrDown(img_color, outImg);
img_color = outImg;
}
//将找到的人脸位置在彩色图上画出矩形框,保存图片,图片名称类似于:IMG_3001_result.JPG
for(int idx = 0;idx < faces.size(); idx++){
cvRectangle(img_color, cvPoint(faces[idx].bbox.x, faces[idx].bbox.y), cvPoint(faces[idx].bbox.x + faces[idx].bbox.width - 1, faces[idx].bbox.y + faces[idx].bbox.height - 1), CV_RGB(255, 0, 0));
}
cvSaveImage(result_path.c_str(), img_color);
//printf("Show result image\n");
//cvShowImage("result", img_color);
}
//主循环,开始处理每一张脸
for(int idx = 0;idx < faces.size(); idx++){
printf("Proc No.%d\n", idx);
//对每张脸找出landmarks(保存到points)
point_detector.PointDetectLandmarks(image_data, faces[idx], points);
IplImage *img_color = cvLoadImage(/*(DATA_DIR + "image_0001.jpg")*/fullpath.c_str(), 1);
int pts_num = 5;
cv::Mat img = cv::cvarrToMat(img_color);
//仿射变换,根据眼睛坐标进行人脸对齐。利用landmarks算出要旋转的角度,对彩色图做旋转(人脸对齐),然后将旋转后的landmarks坐标保存到points中
//后面要抠图,把人脸保存下来
Mat retImg = getwarpAffineImg(img, points);
Mat dstResizeImg;
IplImage* dstimg_tmp = NULL;
int resize_num = 0;
IplImage qImg = IplImage(retImg);
char ch_idx[3] ={0};
sprintf(ch_idx, "%d", idx);
char ch_size[5] = {0};
sprintf(ch_size, "%d", atoi(in_size.c_str()));
//把旋转后的图片创建灰度图,下面要做一次人脸识别,用来抠图将人脸保存下来
//这里的代码各种图片格式转换,确实很绕:P
IplImage *dst_gray = cvCreateImage(cvGetSize(&qImg), qImg.depth, 1);//
cvCvtColor(&qImg, dst_gray, CV_BGR2GRAY);//
seeta::ImageData image_data_inner;
//对旋转后的图片做人脸识别
std::vector<seeta::FaceInfo> faces_inner = detectFace(dst_gray, &image_data_inner);
if (faces_inner.size() == (0)) {
printf("[2]detectFace error!\n");
return false;
}
char ch_x1[5] = {0};
char ch_y1[5] = {0};
char ch_x2[5] = {0};
char ch_y2[5] = {0};
//idx下标是主循环中的下标,这里默认对旋转后图片人脸识别出的人脸顺序,跟主循环识别出的人脸顺序是一致的
//因为两次人脸识别输入的图像不是同一个,一个是原图像,一个是旋转后的,可能会有不一致的情况,不过目前还没出现过
//所以暂时就默认这样做了,偷个懒~~~~
sprintf(ch_x1, "%d", faces_inner[idx].bbox.x);
sprintf(ch_y1, "%d", faces_inner[idx].bbox.y);
sprintf(ch_x2, "%d", faces_inner[idx].bbox.x + faces_inner[idx].bbox.width);
sprintf(ch_y2, "%d", faces_inner[idx].bbox.y + faces_inner[idx].bbox.height);
string save_path = (/*path*/dst_path + "/" + filename + "_crop_" + ch_size + "_" + ch_idx + "_" + ch_x1 + "_" + ch_y1 + "_" + ch_x2 + "_" + ch_y2 +"." + ext);
try{
//根据这张脸的BBox位置设置ROI,下面要开始抠图了
cvSetImageROI(&qImg, cvRect(faces_inner[idx].bbox.x, faces_inner[idx].bbox.y, faces_inner[idx].bbox.width, faces_inner[idx].bbox.height));
CvSize dst_size;
if(in_size != ""){
resize_num = atoi(in_size.c_str());
}
//支持抠图的自定义大小,抠图并保存,文件名类似:IMG_3588_crop_224_0_145_460_652_967.JPG
if(resize_num != 0){
dst_size.height = resize_num;
dst_size.width = resize_num;
dstimg_tmp = cvCreateImage(dst_size, IPL_DEPTH_8U, 3);
cvResize(&qImg, dstimg_tmp);
cvSaveImage(save_path.c_str(), dstimg_tmp);
} else {
cvSaveImage(save_path.c_str(), &qImg);
}
//复位ROI
cvResetImageROI(&qImg);
}catch(...){
printf("Exception occured!\n");
//异常时的抠图处理
cvSetImageROI(img_grayscale, cvRect(faces[idx].bbox.x, faces[idx].bbox.y, faces[idx].bbox.width, faces[idx].bbox.height));
CvSize dst_size;
if(in_size != ""){
resize_num = atoi(in_size.c_str());
}
if(resize_num != 0){
dst_size.height = resize_num;
dst_size.width = resize_num;
dstimg_tmp = cvCreateImage(dst_size, IPL_DEPTH_8U, 3);
cvResize(img_grayscale, dstimg_tmp);
cvSaveImage(save_path.c_str(), dstimg_tmp);
} else {
cvSaveImage(save_path.c_str(), img_grayscale);
}
cvResetImageROI(img_grayscale);
}
//释放资源
// Release memory
cvReleaseImage(&img_color);
delete[] image_data_inner.data;
}
//cvSaveImage(result_path, &qImg);
cvReleaseImage(&img_grayscale);
//delete[]data;
delete[] image_data.data;
return true;
}主函数main虽然行数多,大部分都是重复的,主要是处理命令行,然后调用上面的函数procFaceImage处理人脸图像。
命令行的格式参见GitHub上的ReadMe说明:https://github.com/chengstone/FindFaceInVideo/blob/master/README.md。


2、人脸对齐
算法是采用仿射变换,根据眼睛坐标进行人脸对齐。这里参考了Taily老段的文章和代码,并做了适当修改。
参见:http://blog.csdn.net/taily_duan/article/details/52914399
仿射变换将原坐标(x, y)变换为新坐标(x', y')的计算方法: 
通过上面的公式, 可计算出原图像经过变换后的新图像。
计算仿射变换矩阵函数getRotationMatrix2D:
- Mat getRotationMatrix2D( Point2f center, double angle, double scale );
根据旋转中心, 旋转角度,缩放因子计算仿射变换矩阵。
计算方法: 
代码:
Mat getwarpAffineImg(Mat &src, /*vector<Point2d>*/seeta::FacialLandmark* landmarks)
{
Mat oral; src.copyTo(oral);
//计算两眼中心点,按照此中心点进行旋转, 第0个为左眼坐标,1为右眼坐标
Point2d eyesCenter = Point2d((landmarks[0].x + landmarks[1].x) * 0.5f, (landmarks[0].y + landmarks[1].y) * 0.5f);
//计算两个眼睛间的角度
double dy = (landmarks[1].y - landmarks[0].y);
double dx = (landmarks[1].x - landmarks[0].x);
double angle = atan2(dy, dx) * 180.0 / CV_PI; // Convert from radians to degrees.
//由eyesCenter, angle, scale按照公式计算仿射变换矩阵,此时1.0表示不进行缩放
Mat rot_mat = getRotationMatrix2D(eyesCenter, angle, 1.0);
Mat rot;
//进行仿射变换,变换后大小为src的大小
warpAffine(src, rot, rot_mat, src.size());
vector<Point2d> marks;
//使用仿射变换矩阵,计算变换后各关键点在新图中所对应的位置坐标。
for (int n = 0; n<5/*landmarks.size()*/; n++)
{
Point2d p = Point2d(0, 0);
p.x = rot_mat.ptr<double>(0)[0] * landmarks[n].x + rot_mat.ptr<double>(0)[1] * landmarks[n].y + rot_mat.ptr<double>(0)[2];
p.y = rot_mat.ptr<double>(1)[0] * landmarks[n].x + rot_mat.ptr<double>(1)[1] * landmarks[n].y + rot_mat.ptr<double>(1)[2];
marks.push_back(p);
landmarks[n].x = p.x;
landmarks[n].y = p.y;
}
return rot;
}3、人脸特征比较
这部分代码在FindFaceInVideo中的face_recognition.py。逻辑很简单,使用VGG模型做特征提取。
face_recognition.py来源于https://github.com/HolmesShuan/DeepID-I-Reimplement,我做了修改,并加入了face_recog_test测试函数。
get_feature_new函数打开图片,使用VGG网络提取特征。
compare_pic函数对传入的两个特征计算相似度。
关键点在于阈值的选取。face_recog_test函数会读取测试图片,计算各组图片最佳的参数:Accuracys,Thresholds,Precisions,Recalls,F1Score等。
global net;
net = caffe.Classifier('/home/chengstone/Downloads/caffe/VGGFace/VGG_FACE_deploy.prototxt', '/home/chengstone/Downloads/caffe/VGGFace/VGG_FACE.caffemodel');
def compare_pic(feature1, feature2):
predicts = pw.cosine_similarity(feature1, feature2);
return predicts;
def get_feature_new(path):
global net;
X = read_image_new(path);
# test_num = np.shape(X)[0];
# print test_num;
out = net.forward_all(data = X);
#print out
feature = np.float64(out['fc7']);
feature = np.reshape(feature, (1, 4096));
return feature;
def read_image_new(filepath):
averageImg = [129.1863, 104.7624, 93.5940];
X = np.empty((1,3,224,224));
filename = filepath.split('\n');
filename = filename[0];
im = skimage.io.imread(filename, as_grey=False);
image = skimage.transform.resize(im, (224, 224))*255;
#mean_blob.shape = (-1, 1);
#mean = np.sum(mean_blob) / len(mean_blob);
X[0,0,:,:] = image[:,:,0] - averageImg[0];
X[0,1,:,:] = image[:,:,1] - averageImg[1];
X[0,2,:,:] = image[:,:,2] - averageImg[2];
return X;
#
# __Author__ chengstone
# __WeChat__ 15041746064
# __e-Mail__ [email protected]
#
#'max accuracy: 0.894666666667',
#'max threshold: 0.769',
#'Max Precision: 0.919472913616 599',
#'Max Recall: 1.0 0',
#'Final F1Score: 0.224185221039',
#'Final Precision: 0.868980612883',
#'Final Recalls: 0.926333333333',
#'Best Accuracy: 0.893333333333',
#'Best Thershold: 0.753'
def face_recog_test():
thershold = 0.85;
DATA_BASE = "/home/chengshd/ML/caffe-master/examples/VGGFace/";
POSITIVE_TEST_FILE = "positive_pairs_path.txt";
thresholds = np.zeros(len(np.arange(0.4,1,0.05)))
Accuracys = np.zeros(len(np.arange(0.4,1,0.05)))
Precisions = np.zeros(len(np.arange(0.4,1,0.05)))
Recalls = np.zeros(len(np.arange(0.4,1,0.05)))
F1Score = np.zeros(len(np.arange(0.4,1,0.05)))
tick = 0
for thershold in np.arange(0.4, 1, 0.05):
True_Positive = 0;
True_Negative = 0;
False_Positive = 0;
False_Negative = 0;
print "==============================================="
# Positive Test
f_positive = open(DATA_BASE + POSITIVE_TEST_FILE, "r");
PositiveDataList = f_positive.readlines();
f_positive.close( );
labels = np.zeros(len(PositiveDataList))
results = np.zeros(len(PositiveDataList))
thresholds[tick] = thershold
for index in range(len(PositiveDataList)):
filepath_1 = PositiveDataList[index].split(' ')[0];
filepath_2 = PositiveDataList[index].split(' ')[1];
labels[index] = PositiveDataList[index].split(' ')[2][:-2];
feature_1 = get_feature_new(DATA_BASE + filepath_1);
feature_2 = get_feature_new(DATA_BASE + filepath_2);
result = compare_pic(feature_1, feature_2);
#print "Two pictures similarity is:%f\n\n"%(result)
print "%s and %s Two pictures similarity is : %f\n\n"%(filepath_1,filepath_2,result)
#print "thershold: " + str(thershold);
if result>=thershold:
print 'Same person!!!!\n\n'
else:
print 'Different person!!!!\n\n'
if result >= thershold:
# print 'Same Guy\n\n'
#True_Positive += 1;
results[index] = 1
else:
# wrong
#False_Positive += 1;
results[index] = 0
if labels[index] == 1:
if results[index] == 1:
True_Positive += 1;
else:
False_Negative += 1;
else:
if results[index] == 1:
False_Positive += 1;
else:
True_Negative += 1;
if True_Positive + False_Positive == 0:
Precisions[tick] = 0
else:
Precisions[tick] = float(True_Positive) / (True_Positive + False_Positive)
if True_Positive + False_Negative == 0:
Recalls[tick] = 0
else:
Recalls[tick] = float(True_Positive) / (True_Positive + False_Negative)
if Precisions[tick] + Recalls[tick] == 0:
F1Score[tick] = 0
else:
F1Score[tick] = (Precisions[tick] * Recalls[tick]) / (2 * (Precisions[tick] + Recalls[tick]))
acc = float(np.sum((labels == results))) / len(PositiveDataList)
print 'labels = ',labels
print 'results = ',results
Accuracys[tick] = acc
tick = tick + 1
print "Accuracy: " + str(float(acc));
print "thershold: " + str(thershold);
print 'Accuracys: ', Accuracys
print 'Thresholds: ', thresholds
print 'Precisions: ', Precisions
print 'Recalls: ', Recalls
print 'F1Score: ', F1Score
print 'Max Precision: ', np.max(Precisions), np.where(Precisions == np.max(Precisions))[0][0]
print 'Max Recall: ', np.max(Recalls), np.where(Recalls == np.max(Recalls))[0][0]
print "Final Accuracy: ", np.max(Accuracys)
re = np.where(Accuracys == np.max(Accuracys))
print 'Final Thershold: ', thresholds[re[0][0]]
print 'Final F1Score: ', np.max(F1Score)
re = np.where(F1Score == np.max(F1Score))
print 'Final Precision: ',Precisions[re[0][0]]
print 'Final Recalls: ',Recalls[re[0][0]]
print 'Best Accuracy: ',Accuracys[re[0][0]]
print 'Best Thershold: ',thresholds[re[0][0]]4、开始找人
重头戏来了,代码见facedetect.py。先介绍图片中找人。
解释一个概念:待查找人。比如我是私人侦探,你来找我让我在某个地方找人,那你得给我提供你要找的人的照片吧?不然我哪知道要找谁。
这个照片就是待查找人的照片。
思路很清晰,三件事: ①获取目标(待查找人)的人脸(特征)。使用SeetaFaceEngine/FaceAlignment进行人脸识别。 ②获取输入图片中的人脸(特征)。使用opencv的cv2.CascadeClassifier做人脸识别。 ③预测。使用face_recognition.py做人脸特征的比较,计算相似度。
#图片找人主函数,主要就是调用三个函数:getTargetFace,getDstFace,prediction
def findPersionByImage():
global targetsArr
global dstArr
getTargetFace()
#print targetsArr[0].shape
getDstFace()
# print dstArr[0].shape
prediction()
print 'done'
TargetPath = MAIN_PATH + 'targets.txt'
#获取目标(待查找人)的人脸(特征)。
def getTargetFace():
# print 'getTargetFace IN:'
global targetsArr
if os.path.exists(TargetPath) == False:
print TargetPath + ' File not found'
exit(0)
#targets.txt中保存待查找人的图片位置
fileObj = open(TargetPath)
fileObjDataList = fileObj.readlines();
fileObj.close()
#for line in fileObj:
# print line
#支持多目标查找,比如你给我甲,乙,丙三个人的照片
for index in range(len(fileObjDataList)):
line = fileObjDataList[index]
print index, line[:-1]
if os.path.exists(line[:-1]) == False:
print TargetPath + ' File not found'
else:
targetsArr.append(returnFaceImg(line[:-1], MAIN_PATH + line[:-1].split('/')[-1].split('.')[0] + '/', 224))
#SeetaFaceEngine/FaceAlignment的可执行程序路径
FaceCropPath = '/home/chengstone/Downloads/SeetaFaceEngine/FaceAlignment/build/'
FA_TEST = './fa_test'
IMAGE_TXT = 'image.txt'
#程序会给每个待查找人建立一个文件夹,文件夹名就是待查找人图片的名字命名(dstpath)
def returnFaceImg(imagePath, dstpath, corp_size):
# print 'returnFaceImg IN:'
#写入人脸识别的命令行,即将调用SeetaFaceEngine/FaceAlignment
imagetxt_file = open(FaceCropPath + IMAGE_TXT, 'w')
imagetxt_file.writelines(imagePath + ' ' + dstpath + ' ' + str(corp_size) + '\n')
imagetxt_file.close()
#判断指定文件/目录是否存在,如果不存在则创建
checkFile(dstpath)
#调用SeetaFaceEngine/FaceAlignment的开关,应该设成1
if createFaceFlag == 1:
os.chdir(FaceCropPath)
os.system(FA_TEST) #人脸识别
#cv2.waitKey(500)
#print 'here'
t_targetsArr = []
#待查找人图片命名的文件夹(dstpath)目录结构:
#只有一个人的情况下,通常有两个文件,一个名字类似IMG_3588_crop_224_0_145_460_652_967.JPG,这个是人脸图片
#另一个名字类似IMG_3588_result.JPG,这个是脸部用矩形框圈出的原始图片
#有可能会有多张待查找人人脸,所以做循环,将每一张人脸特征保存到数组中
for parent, dirnames, filenames in os.walk(dstpath):
for f_file in filenames:
#if "result" in filenames:
if f_file.find("result") == -1:
print parent, dirnames, f_file
#调用face_recognition.py获取人脸特征
t_targetsArr.append(get_feature_new(parent + f_file))
else:
#显示脸部用矩形框圈出的图片
img = cv2.imread(parent + f_file)
plt.subplot(1, 2, 1)
b, g, r = cv2.split(img)
img2 = cv2.merge([r, g, b])
if VIDEO_FLAG != 1:
plt.imshow(img2)
# plt.show()
#cv2.namedWindow(f_file)
#cv2.imshow(f_file, img)
#cv2.waitKey(5)
print np.array(t_targetsArr).shape
return np.array(t_targetsArr)
#获取输入图片(camPicture)中的人脸(特征)。
def getDstFace():
# print 'getDstFace IN:'
global dstArr
dstArr.append(returnFaceImg_Dst(camPicture))
# print dstArr
def returnFaceImg_Dst(imagePath):
# print 'returnFaceImg_Dst IN:'
global FoundFace
global dst_rects
global g_vis
img = cv2.imread(imagePath)
print 'img.dtype = ', img.dtype
#aa = cv.CloneMat(np.fromarrays(img))
#print aa.dtype
# cv.CreateMat(img)
#如果图片尺寸过大,要缩小尺寸,否则影响人脸识别效果
#print imagePath
sp = img.shape
while(sp[0] > 768 + 512 or sp[1] > 1024 + 1024): #sp[0]: height sp[1]: width sp[3]: tongdao
img = cv2.pyrDown(img)
sp = img.shape
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
gray = cv2.equalizeHist(gray)
#使用cv2.CascadeClassifier做人脸识别
rects = detect(gray, cascade)
vis = img.copy()
g_vis = vis
print 'dst rects =',rects,vis.dtype,vis.shape
if len(rects) != 0:
print imagePath + ' Face found'
FoundFace = 1
#处理人脸Bbox重叠的情况
new_rects = procOverlap(rects)
print new_rects.shape
#循环获取每张脸的特征,并保存到数组
t_dstsArr = []
for rect in new_rects:
print rect[0], rect[1], rect[2]-rect[0], rect[3]-rect[1]
print imagePath.split('/')[-2]
vis2 = vis[rect[1]:rect[3], rect[0]:rect[2], :]
# vis2 = vis[rect[2]:rect[0], rect[3]:rect[1], :]
cv2.imwrite("./tmp.jpg", vis2)
# aaa = cv2.imread("./tmp.jpg")
# plt.imshow(aaa)
# plt.show()
t_dstsArr.append(get_feature_new("./tmp.jpg"))
#在输入图片上用矩形框圈出识别出的人脸
if DEBUG_FLAG == 1:
draw_rects(vis, new_rects, (255, 0, 0))
# plt.imshow(vis)
# plt.show()
dst_rects = new_rects
print np.array(t_dstsArr).shape
return np.array(t_dstsArr)
else:
FoundFace = 0
print imagePath + ' Face not found'
return []
#人脸识别,scaleFactor=1.06559这个数是经过很多次测试得出的
def detect(img, cascade):
# print 'detect IN:'
rects = cascade.detectMultiScale(img, scaleFactor=1.06559, minNeighbors=4, minSize=(5, 5), flags = cv.CV_HAAR_SCALE_IMAGE)
if len(rects) == 0:
return []
rects[:,2:] += rects[:,:2]
return rects
#人脸特征都准备好了,现在开始预测。
def prediction():
print 'prediction IN:'
global targetsArr
global dstArr
global dst_rects
# t_dstArr = np.array(dstArr)
# print dstArr
# try:
if 1 == 1:
if FoundFace == 1:
# if len(dstArr[0]) != 0:
dstShape = dstArr[0].shape
print 'dst shape: ', dstShape[0]
targetShape = targetsArr[0].shape
print 'target shape: ', targetShape[0]
results = np.zeros([dstShape[0], targetShape[0]])
#双层循环,输入图片和待查找人都可能是多个,将每一次相似度结果保存起来
print '===========predict results: ==========='
for i in range(dstShape[0]):
for j in range(targetShape[0]):
# print results[i][j]
results[i][j] = compare_pic(dstArr[0][i], targetsArr[0][j])
print results[i][j]
#将每一个相似度与阈值比较,超出VGG_THRESHOLD阈值就换个颜色在人脸上画矩形框,并标出相似度,最终图像保存到tmp.jpg
# print dstArr[0][0].shape, dstArr[0][0]
# result = compare_pic(feature_1, feature_2);
for i in range(dstShape[0]):
for j in range(targetShape[0]):
if results[i][j] >= VGG_THRESHOLD:
draw_single_rect(g_vis, dst_rects[i], (0, 255, 0))
if DEBUG_FLAG == 1:
if results[i][j] >= VGG_THRESHOLD:
pen = (0, 255, 0)
else:
pen = (255, 0, 0)
cv2.putText(g_vis, str(round(results[i][j], 2)), (dst_rects[i][0], dst_rects[i][1] - 7), cv2.FONT_HERSHEY_DUPLEX, 0.8, pen)
cv2.imwrite(MAIN_PATH + "tmp.jpg", g_vis)
plt.subplot(1, 2, 2)
b, g, r = cv2.split(g_vis)
img2 = cv2.merge([r, g, b])
# plt.figure(num=1)
plt.imshow(img2)
if VIDEO_FLAG != 1:
plt.show()关于阈值VGG_THRESHOLD:
按理说相似度越高越好,经过我的测试,我将相似度阈值(VGG_THRESHOLD)设置成了0.4。
就是说相似度大于40%,我就认为是同一个人。这个值设的确实有点小了,奈何我用自己的照片去测试,很少出现相似度大于85%以上的时候。。。。
但是一旦两个人不相似,相似度很低,大都小于1%,所以0.4这个值还是堪用的。

5、人脸检测时Bbox重叠的处理
在使用cv2.CascadeClassifier做人脸检测时,有时会出现矩形框重叠的情况,所以需要将这些重叠的矩形框识别出来
一旦重叠的矩形框指向的是同一个人脸,则需要删除一个矩形框
这里参考了i_wooden的文章,参考了部分代码,原文:
判断两个矩形是否重叠http://blog.csdn.net/qianchenglenger/article/details/50484053
算法思想是:
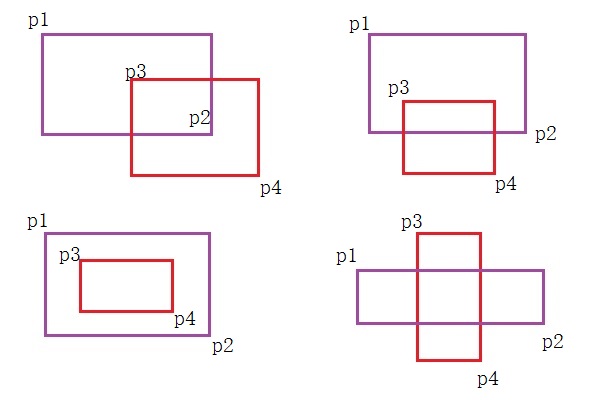
①先判断两个矩形是否相交。相交条件是:P2点坐标大于P3点坐标 并且 P4点坐标大于P1点坐标。
def isOverlap(tmp_rect, rects):
i = 0
for x1, y1, x2, y2 in rects:
if(tmp_rect[0] != x1 and tmp_rect[1] != y1 and tmp_rect[2] != x2 and tmp_rect[3] != y2):
if(tmp_rect[2] > x1 and x2 > tmp_rect[0] and tmp_rect[3] > y1 and y2 > tmp_rect[1]):
return i
i = i + 1
return -1②一旦相交,需要判断两个相交的矩形框是否是同一个人脸,需要根据相交面积与组合面积的比例来判断。
计算两个矩形的重叠面积比例,即相交面积与组合面积的比例。
def computeRectJoinUnion(rect1, rect2):
#x1,y1为相交位置的左上角坐标,x2,y2为相交位置的右下角坐标
x1 = max(rect1[0], rect2[0])
y1 = max(rect1[1], rect2[1])
x2 = min(rect1[2], rect2[2])
y2 = min(rect1[3], rect2[3])
#判断是否相交,如果相交,求出相交面积
AJoin = 0
if(x2 > x1 and y2 > y1):
AJoin = (x2 - x1) * (y2 - y1)
A1 = (rect1[2] - rect1[0]) * (rect1[3] - rect1[1])
A2 = (rect2[2] - rect2[0]) * (rect2[3] - rect2[1])
#两矩形组合的面积
AUnion = A1 + A2 - AJoin
#返回相交面积与组合面积的比例
if(AUnion > 0):
return float(AJoin) / AUnion
return 0def procOverlap(rects):
print 'procOverlap IN:'
#print rects
i = 0
new_rects = []
del_rects = []
for x1, y1, x2, y2 in rects:
tmp_rect = rects[i]
#第一步,判断是否相交
bOverlap = isOverlap(tmp_rect, rects)
if(bOverlap > -1):
print tmp_rect
print rects[bOverlap], bOverlap
#第二步,计算矩形重叠比例
rectJountUnion = computeRectJoinUnion(tmp_rect, rects[bOverlap])
print 'rectJountUnion = ', rectJountUnion
#第三步,与矩形重叠比例阈值做比较
if(rectJountUnion > del_threshold):
A1 = (tmp_rect[2] - tmp_rect[0]) * (tmp_rect[3] - tmp_rect[1])
A2 = (rects[bOverlap][2] - rects[bOverlap][0]) * (rects[bOverlap][3] - rects[bOverlap][1])
#一旦超出阈值,留下面积小的矩形框,删除面积大的矩形框
if(A1 < A2):
new_rects.append(tmp_rect)
#np.delete(rects, bOverlap, 0)
del_rects.append(rects[bOverlap])
print 'A1 < A2'
#else:
else:
new_rects.append(tmp_rect)
else:
new_rects.append(tmp_rect)
#print 'i = ', i
#print 'new_rects = ', new_rects
#print new_rects[i], i
i = i + 1
#删除重叠矩形框
del_idx = []
for node in del_rects:
j = 0
for new_node in new_rects:
#print new_node[0],new_node[1],new_node[2],new_node[3]
if(node[0] == new_node[0] and node[1] == new_node[1] and node[2] == new_node[2] and node[3] == new_node[3]):
del_idx.append(j)
#if(node == new_node):
# print node,' is equel.'
j = j + 1
print del_idx
for idx in del_idx:
del new_rects[idx]
#返回无重叠矩形框
#print new_rects
print 'procOverlap done.'
return np.array(new_rects)6、视频找人
视频找人跟图片找人原理一样,视频不就是图片的集合嘛,本质上还是图片找人。
然后将找到的人和识别到的人脸画上矩形框,输出成视频文件即可。
def findPersionByVideo():
global targetsArr
global dstArr
global camPicture
#获取目标(待查找人)的人脸(特征)。
getTargetFace()
#打开视频文件
videoCapture = cv2.VideoCapture(videoPath)
fps = videoCapture.get(cv2.cv.CV_CAP_PROP_FPS)
size = (int(videoCapture.get(cv2.cv.CV_CAP_PROP_FRAME_WIDTH)), int(videoCapture.get(cv2.cv.CV_CAP_PROP_FRAME_HEIGHT)))
framesCount = videoCapture.get(cv2.cv.CV_CAP_PROP_FRAME_COUNT)
# videoWriter = cv2.VideoWriter(MAIN_PATH + 'out/' + videoPath.split('/')[-1], cv2.cv.CV_FOURCC('M', 'J', 'P', 'G'), fps, size)
videoWriter = cv2.VideoWriter(MAIN_PATH + 'out/test.avi', cv2.cv.CV_FOURCC('M', 'J', 'P', 'G'),
fps, size)
#处理后输出的视频文件
print 'videoWrite = ' + MAIN_PATH + 'out/test.avi'
success, frame = videoCapture.read()
#开始视频每一帧的循环
print 'frame.shape = ', frame.shape
tick = 0
while success: # and tick < 10
tick = tick + 1
print 'Current frame : ' + str(tick) + ' / ' + str(framesCount)
dstArr = []
#将视频每一帧作为输入图片
cv2.imwrite(MAIN_PATH + "frame_tmp.jpg", frame)
camPicture = MAIN_PATH + "frame_tmp.jpg"
#获取输入图片(camPicture)中的人脸(特征)
getDstFace()
# getDstFace_2()
#开始预测
prediction()
#显示处理的每一帧,并输出到处理后的视频文件中
print 'g_vis.shape = ', g_vis.shape
cv2.imshow("find persion by video", g_vis)
# cv2.imshow("find persion by video", frame)
cv2.waitKey(1000/int(fps))
videoWriter.write(g_vis)
# videoWriter.write(frame)
success, frame = videoCapture.read()
videoCapture.release()
videoWriter.release()
print 'findPersionByVideo done'7、结尾
最后,关于代码工程的目录结构和使用说明请参见: https://github.com/chengstone/FindFaceInVideo/blob/master/README.md 如有问题可以随时联系: mail:[email protected]