一般电机都是连续旋转的,而步进电机却是一步一步地转动,故称之为步进电机,每次能转动的最小角度称为步距角。
每当步进电机的驱动器接收到一个驱动脉冲信号后,步进电机将会按照设定的方向转动一个固定的角度(有的步进电机可以直接输出线位移,称为直线电动机)。
对于角位移步进电机,可以通过控制脉冲的个数来控制角位移量,从而达到准确定位的目的。
可以通过控制脉冲频率来控制步进电机的转动的速度和加速度,从而达到调速的目的。
步进电机按相数分可分为:单相,双相和多相三种。

设A相首先通电(B、C两相不通电),产生A-A′轴线方向的磁通,并通过转子形成闭合回路。这时A、A′极就成为电磁铁的N、S极。在磁场的作用下,转子总是力图转到磁阻最小的位置,也就是图一;接着B相通电(A、C两相不通电),也就是图二,这种通电方式称为1相励磁方式。
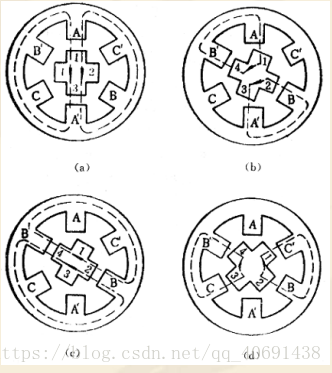
设A相先通电,结果如图(a);后B相通电(A不断电),结果如图(b);A相断电,变为图(c),图(c)与图(a)一样;最后重复步骤。这种通电方式成为1—2相励磁方式。
#include <reg52.h>
#define uchar unsigned char
#define uint unsigned int
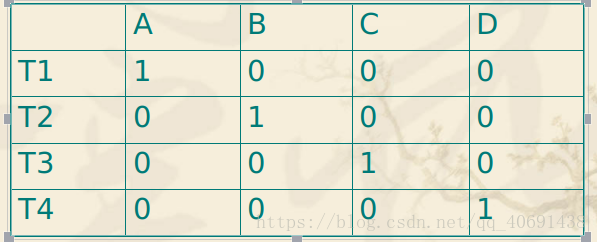
uchar Step_table[]={0x40,0x20,0x10,0x08};//01000000
void delay(uint a)
{
while(a--);
}
void main(void)
{
uchar i;
uint j;
j=512;
while(j--)
{
for(i=0;i<4;i++)
{
P0=Step_table[i];
delay(800);
}
}
while(1);
}