前一段时间一直在搞毕业设计,现在答辩结束,可以好好整理一下了。整个毕业设计的思路可以参考我的上一篇文章。
今天说一下毕设的第一个步骤,利用OV5640进行对地面无人车辆的识别追踪。
一开始打算利用STM32F407和OV5640来对地面无人车辆进行二值化识别,但是由于STM32对于运算处理的速度还是比较慢,决定采用特定颜色物体识别追踪的方法来解决这个问题。当然CSDN博客上也有很多相关的程序,大家直接下载就行。这里给大家普及一下简单的图像处理知识,若有问题,可以直接指出。(部分内容引自权威之作 刚雷萨斯的《数字图像处理》)
第一:图像的获取
图像的获取我采用的是正点原子的OV5640摄像头模块,可以在淘宝上直接购买到。OV5640具有500W像素,拍起来还是挺清晰的,但是广角比较小,对后期处理还是比较麻烦的,做物体识别的最好还是选一个广角大的USB摄像头好。
第二:RGB模型转化为HSI模型
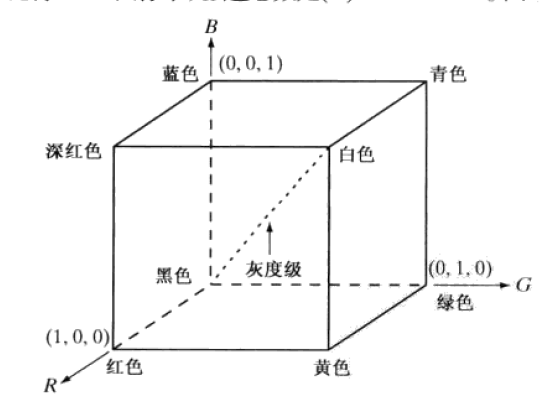
这样的一个笛卡尔坐标系可以比较形象的阐述了RGB颜色的组成原理,有点类似向量的意思。
而HSI模型则能够更好的解释颜色的组成,H代表色调,一种描述纯色的颜色属性;S代表饱和度,一种纯色被白色稀释程度的度量;I代表强度。其中HSI与RGB的转化百度上有很多那种在线公式,可以去体验一下。
第三:腐蚀和膨胀
可以简单的理解腐蚀类似形态学滤波操作,缩小或者细化二值化图像中的物体。

这样的一幅图可以比较形象的解释腐蚀的变化过程。
与腐蚀不同,膨胀会“增长”或者“粗化”二值化图像的物体
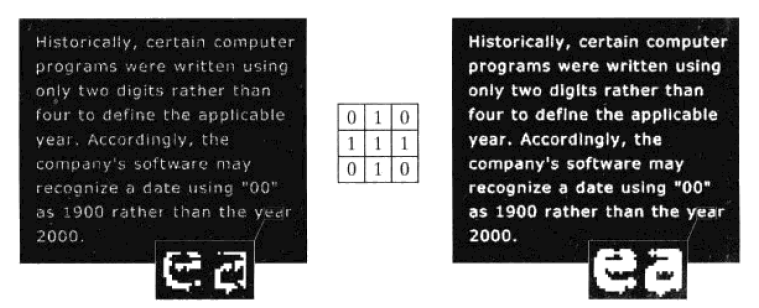
如图所示,膨胀可以桥接一些断裂的图像。
程序思路可以这样进行:
(1)获取RGB图像,显示出来
(2)将RGB转化为HSI
(3)进行腐蚀膨胀操作
(4)获取各个像素的HSI值
(5)最接近设定的HSI值的像素范围即为目标物体
下载程序来进行特定颜色物体的识别追踪,结果如下:
