STM32-USART串口的应用
内容概要:
串行通信的基本概念
串口寄存器介绍
STM32实现串口数据的收发
HAL串口库函数的使用及printf的实现
串行通信的基本概念:
内容概要:
通信的基本概念
USART介绍
串口的电路连接
串口的通信协议
同步通信和异步通信:
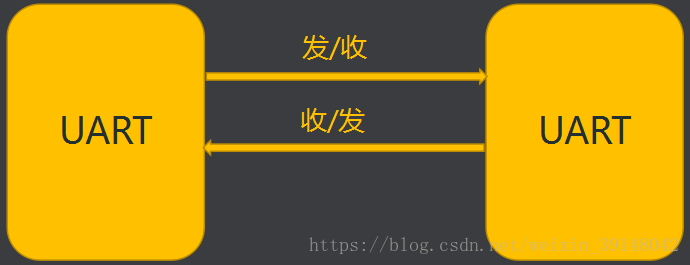
通信,最少要有两个对象,一个收,一个发。
同步通信:一般情况下同步通信指的是通信双方根据同步信号进行通信的方式。比如通信双方有一个共同的时钟信号,大家根据时钟信号的变化进行通信。

异步通信:是指数据传输速度匹配依赖于通信双方有自己独立的系统时钟,大家约定好通信的速度。异步通信不需要同步信号,但是并不是说通信的过程不同布。
串行通信和并行通信的区别:
串行通信:指的是同一时刻只能收或发一个bit位信息。因此只用1根信号线即可。
并行通信:指的是同一时刻可以收或发多个bit位的信息,因此需要多根信号线才行。

-串行传输:数据按位顺序传输。 -并行传输:数据各个位同时传输。
-优点:占用引脚资源少 -优点:速度快
-缺点:速度相对较慢 -缺点:占用引脚资源多
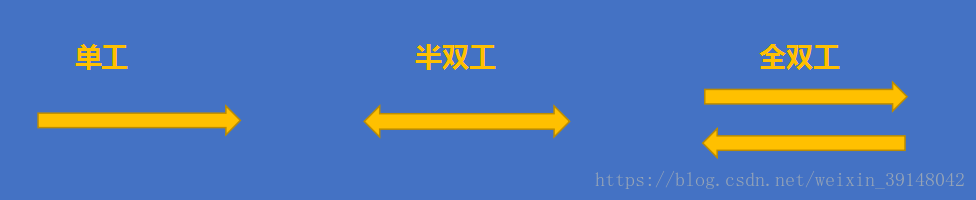
单工、半双工、全双工:
单工:要么收,要么发,只能做接收设备或者发送设备。比如收音机
半双工:可以收,可以发,但是不能同时收发, 比如对讲机
全双工:可以在同一时刻既接收,又发送。 手机
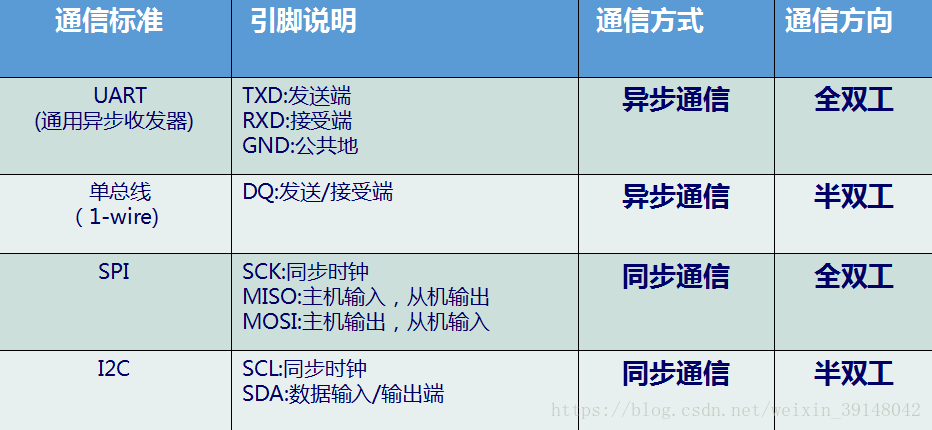
常见通信总结:
USART基本概念:
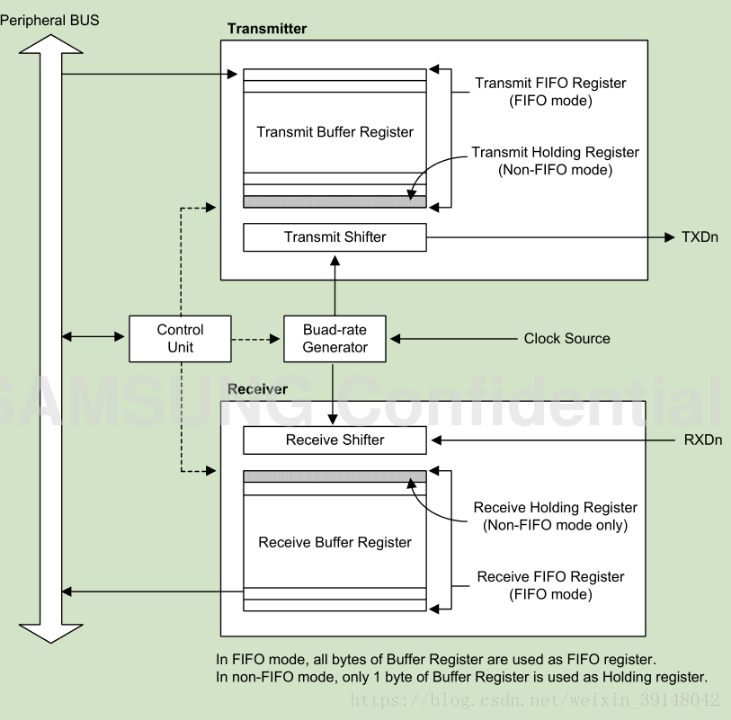
通用同步异步收发器(USART)灵活地与外部设备进行全双工数据通信,满足外部设备对工业标准NRZ异步串行数据格式的要求。USART通过小数波特率发生器提供了多种波特率。它支持同步单向通信和半双工单线通信;还支持LIN(局域互联网络),智能卡协议与IrDA(红外数据协会)SIR ENDEC规范,以及调制解调操作(CTS/RTS)。而且,它还支持多处理器通信。
USART支持同步模式,因此USART 需要同步始终信号USART_CK(如STM32 单片机),通常情况同步信号很少使用,因此USART和一般单片机UART使用方式是一样的,都使用异步模式。
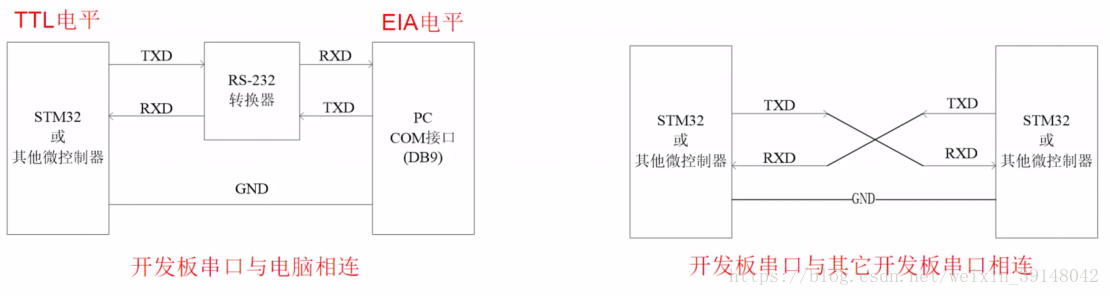
串口电路连接:

STM32f051串口:STM32F051内置多达两个通用同步 / 异步收发器( USART1 和 USART2 ),通信速度可达 6 Mbit / s
串口通信协议介绍:
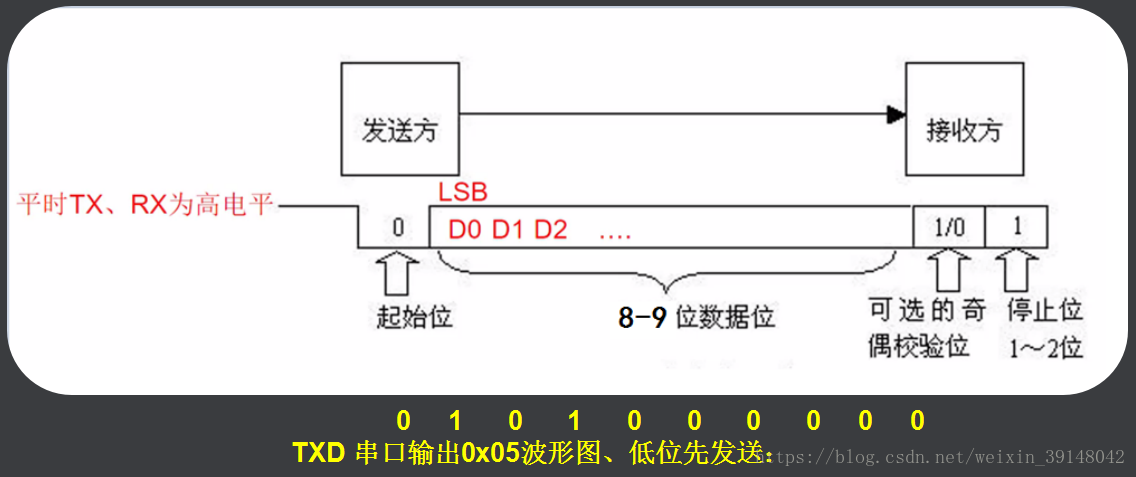
波特率:
在串行通信中,用“波特率”来描述数据的传输速率。所谓波特率,既每秒传送的二进制位数,其单位为bps(bits per second)。它是衡量串行数据速度快慢的重要指标。
国际上规定一个标准的波特率系列: 110、300、600、1200、1800、2400、4800、9600、115200、14.4Kbps、19.2Kbps、……
例如:115200bps、指每秒传送115200位。通信双方必须设置同样的同学速率才能正常通信
注意:实际的数据没这么多,还包括起始位,结束位,校验位
STM32 USART寄存器介绍
内容概要:
控制寄存器——USART_CR
状态寄存器——USART_SR
数据寄存器——USART_DR
波特率寄存器——USART_BRR
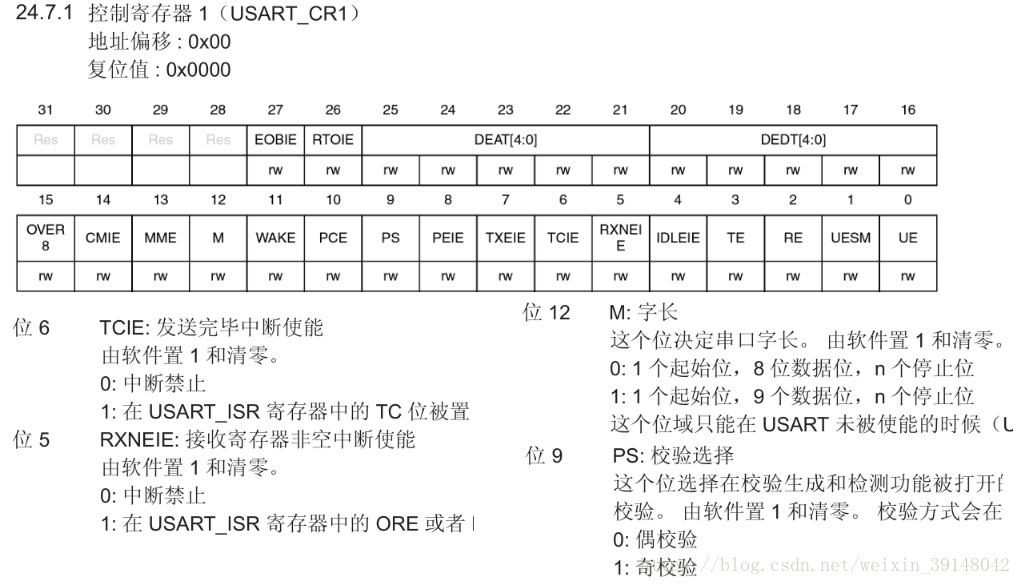
串口寄存器-USART_CR1:
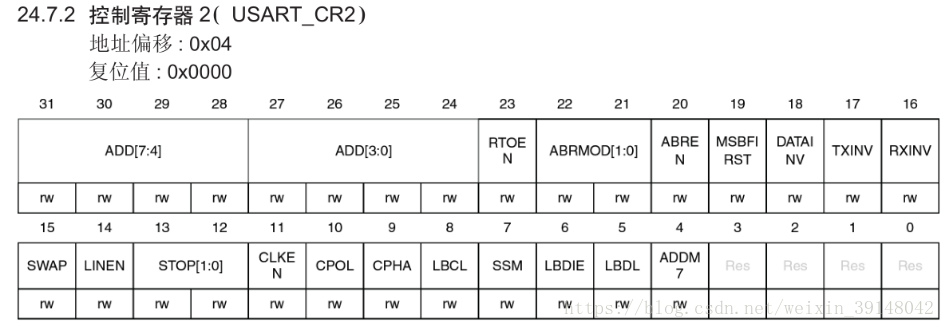
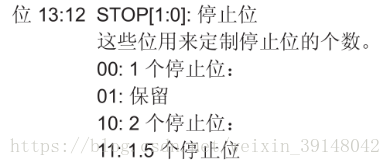
串口寄存器-USART_CR2:
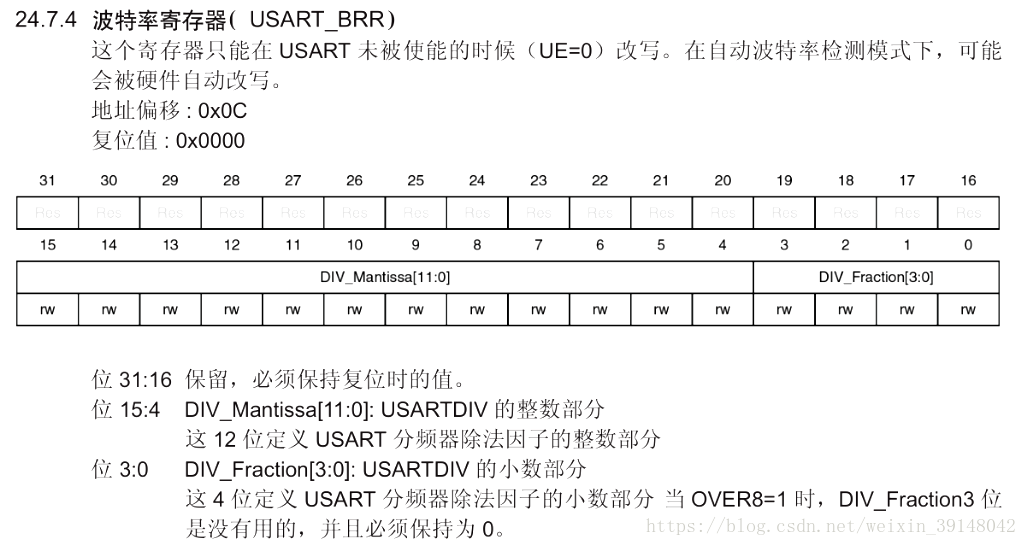
串口寄存器-USART_BRR:
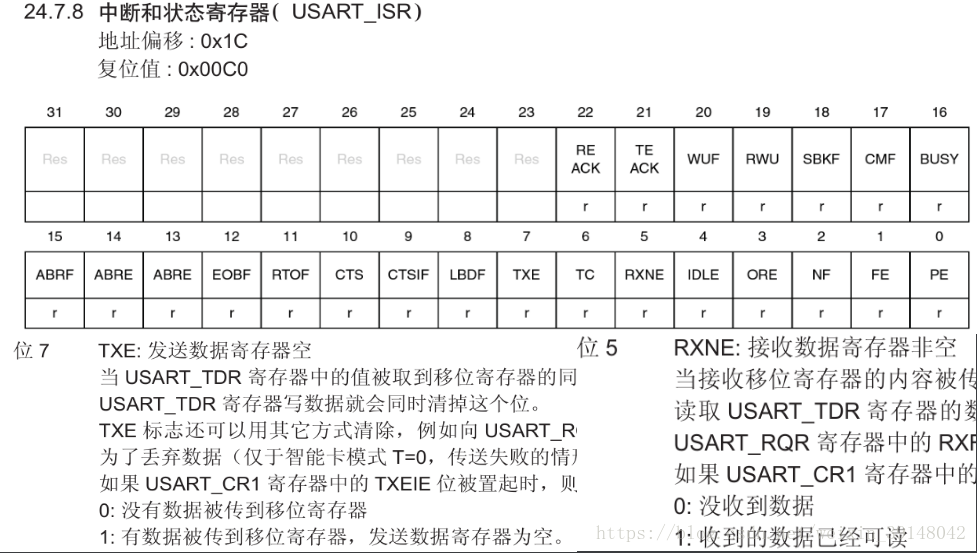
串口寄存器-USART_ISR:
串口数据的发送和接收:
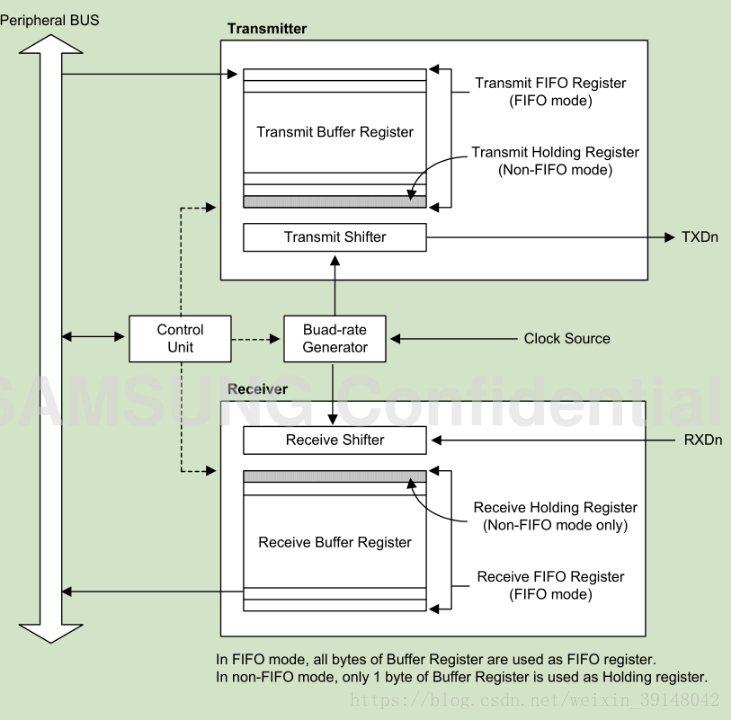
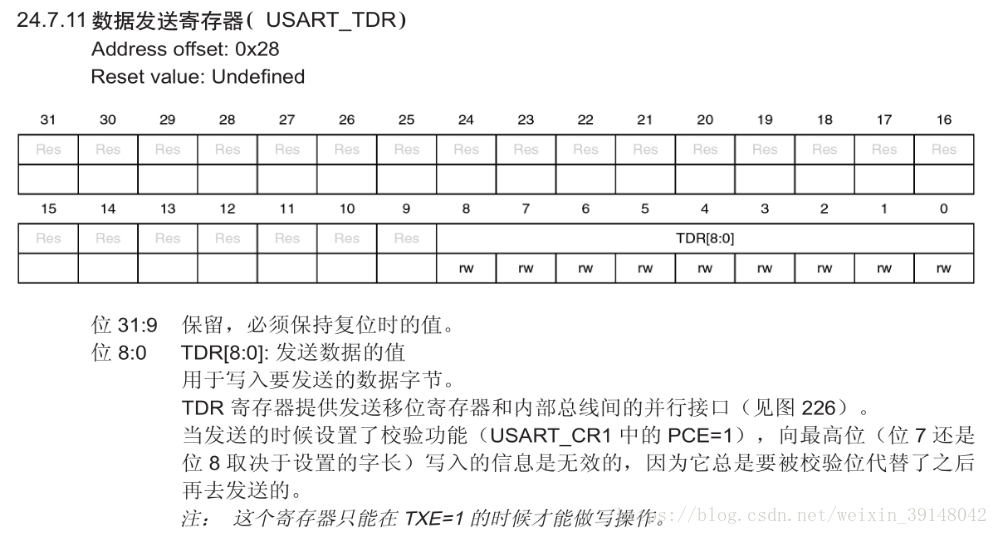
串口寄存器-USART_TDR:
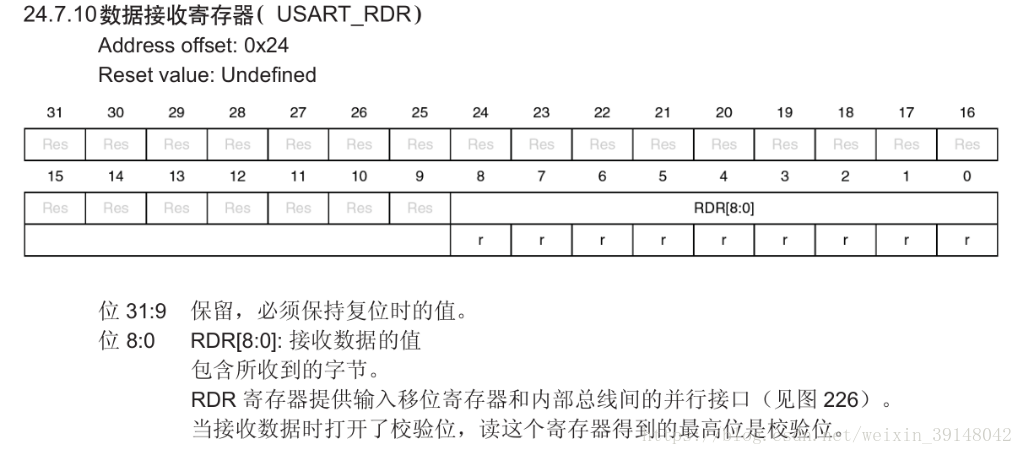
串口寄存器-USART_RDR:
STM32实现串口数据的收发
内容概要:
串口硬件原理图
CubeMX中串口的配置
串口发送一个字符
串口接收一个字符
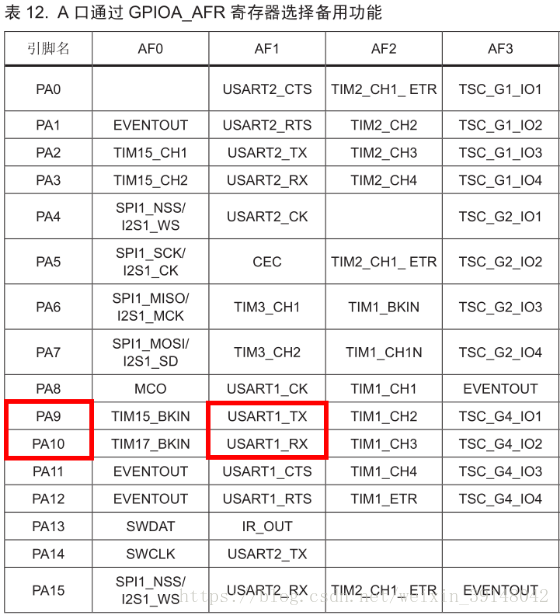
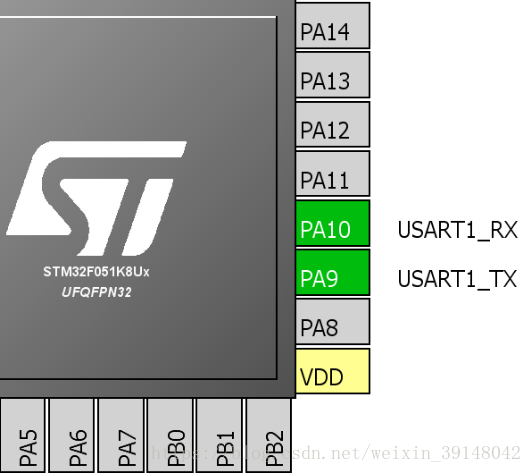
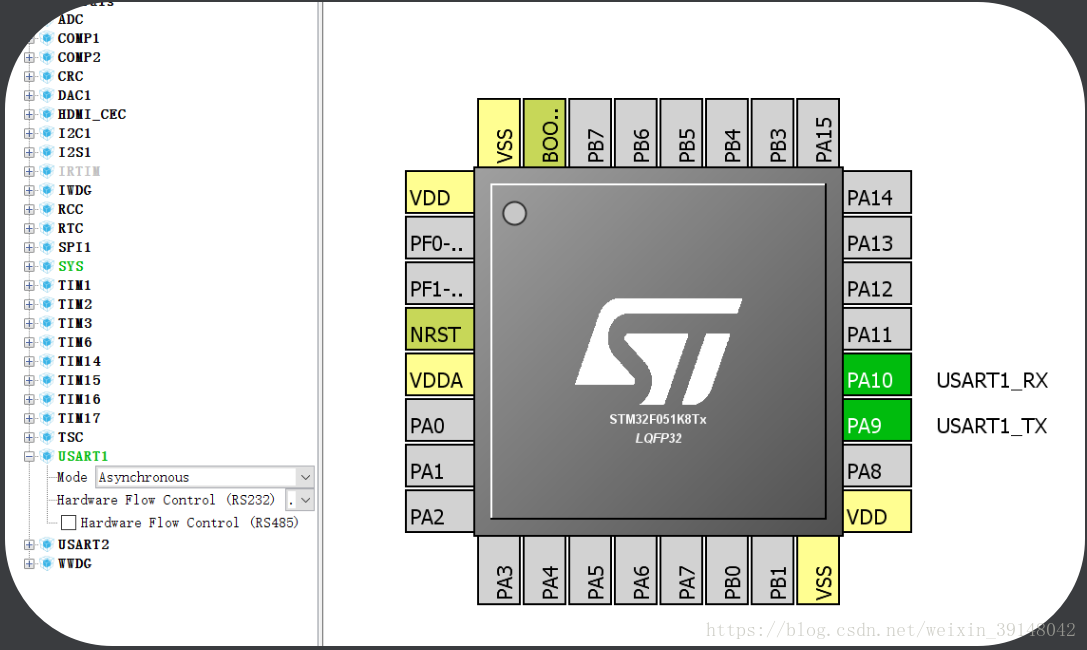
串口硬件原理图:
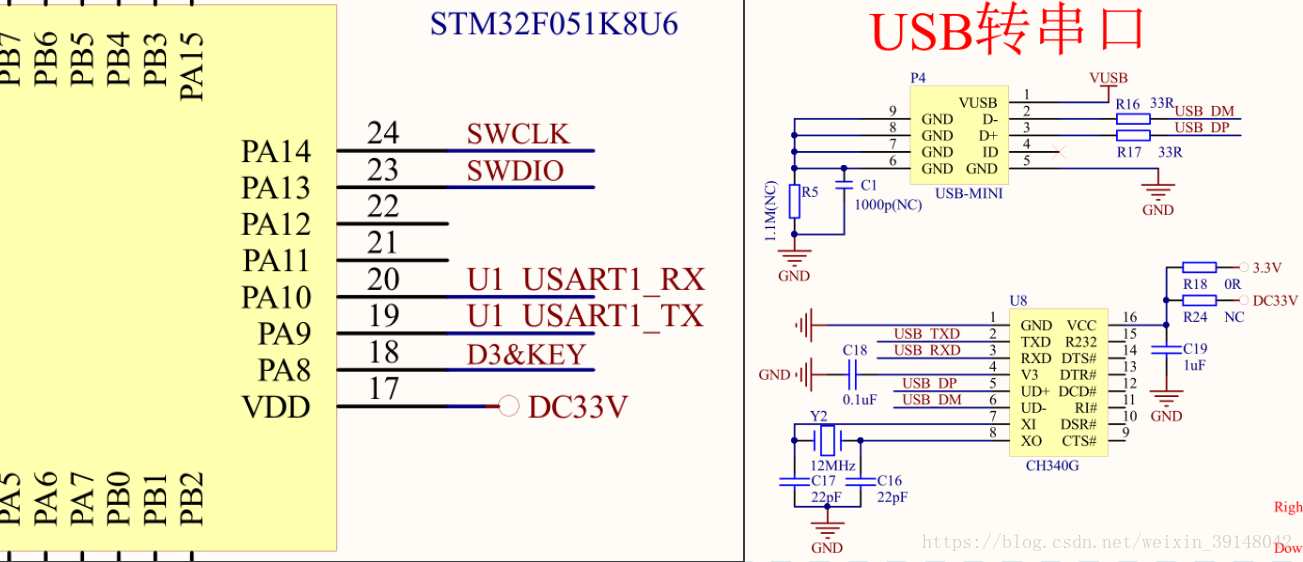
注意:如果无法识别串口,清装好ch340串口驱动
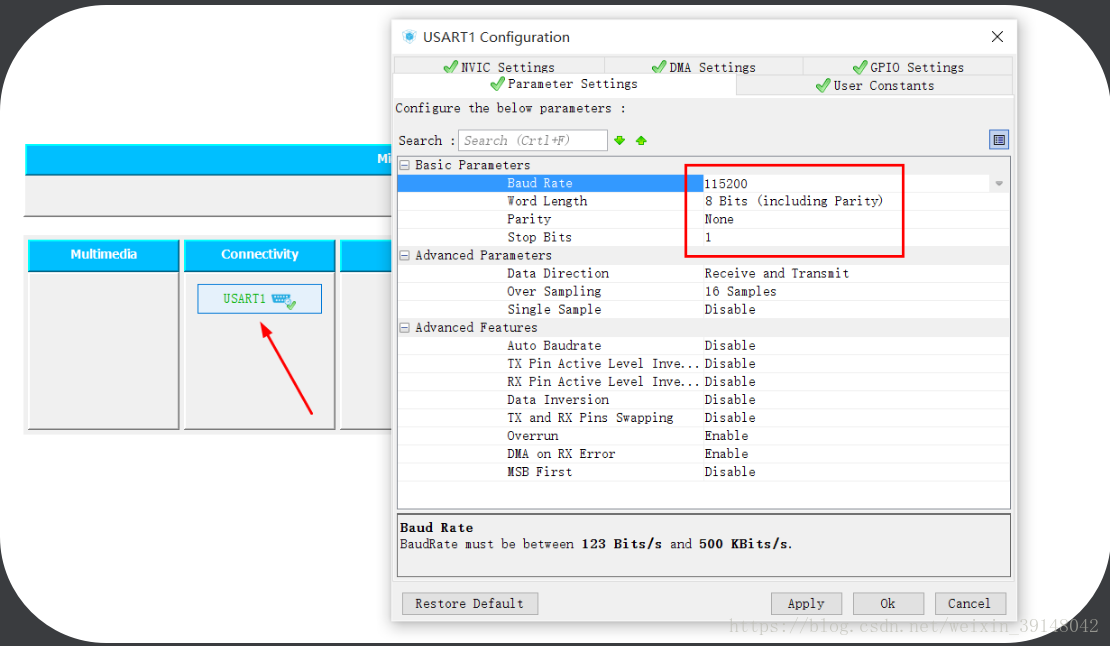
CubeMX中串口的配置:
串口数据的发送和接收:
串口发送一个字符:
void Uart_Putchar(uint8_t ch)
{
while(!(USART1->ISR &(1<<7))); //等待发送寄存器空
USART1->TDR = ch; //发送字符
}
void Uart_Putstring(uint8_t *str)
{
while(*str != '\0')
{
Uart_Putchar(*str);
str++;
}
}串口接收一个字符:
uint8_t Uart_Getchar(void)
{
while(!(USART1->ISR & (1<<5))); //等待收到一个字符的数据
return USART1->RDR; //返回收到的字符
}HAL串口库函数的使用及printf的实现
HAL库中串口的收发函数:
Stm32f0xx_hal_uart.c 文件中
串口的发送函数
HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)
串口的接收函数
HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout)printf()实现串口重定向:
printf函数调用的是c库中的fputc函数。因此我们如果重新写了fputc函数,就可以改变printf函数的功能,可以向串口打印输出。
int fputc(int ch,FILE *f){
while((USART1->ISR&(1<<7)) == 0);
USART1->TDR=(uint8_t)ch;
return ch;
}