从遥感影像中提取出道路是遥感领域智能分析的一种常见任务。今天刚好看到CVPR 2018的挑战赛任务中(http://deepglobe.org/leaderboard.html)有这样的一个已经完成的竞赛,对道路提取第一名的方案(北邮团队的D-LinkNet: LinkNet with Pretrained Encoder and Dilated Convolution for HighResolution Satellite Imagery Road Extraction)进行了复现。
其中还有另外两个竞赛也挺有意思的。
1、方案所采用架构
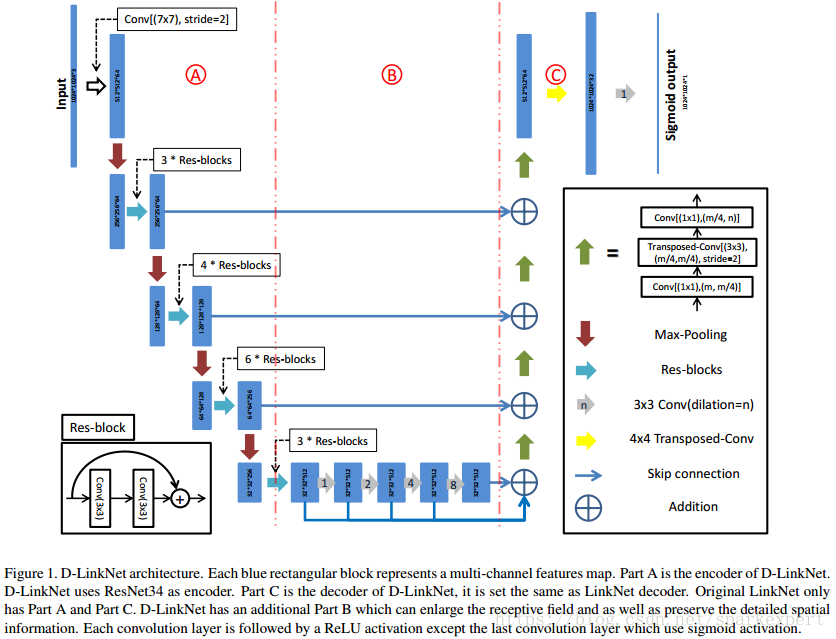
在论文中,作者说明了与Linknet的区别,就是增加了下图中的B部分,即扩张卷积层,通过多个卷积层信息的叠加,可以最大化地增大感受视野范围,同时利用ResNet34来替换掉18。
D-LinkNet uses Linknet [15] with pretrained encoder as its backbone and has additional dilated convolution layers in the center part. Linknet is an efficient semantic segmentation neural network which takes the advantages of skip connections,residual blocks [10] and encoder-decoder architecture.The original Linknet uses ResNet18 as its encoder,which is a pretty light but outperforming network. Linknet has shown high precision on several benchmarks [19, 20],and it runs pretty fast.
从下图可以看出,
2、测试
由于实验需要的图片需要长与宽一致,因此在谷歌地图上找了256*256(论文说是支持1024*1024)的瓦片来进行实验,发现必须找到16级以上的瓦片才可以实现检测,可能训练数据集中需要道路的宽度具有一定的长度才可以。随手找了几张测试,其效果还是相当不错的。



