2.OpenCV由于一些历史遗留问题,代码中C结构(CvMat等)和C++结构(Mat::Mat等)共用,难以理解。
可能正是由于这些问题,导致代码极其复杂,没有几个人愿意花费时间去深挖代码。
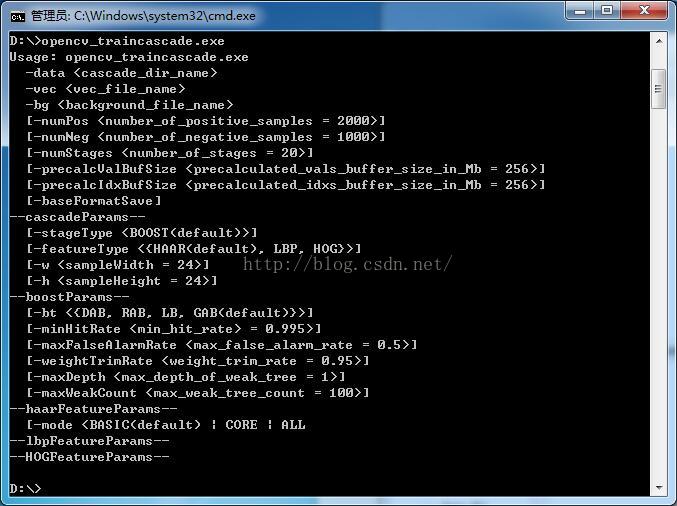
图1 opencv_traincascade.exe训练程序usage界面
图1显示了opencv_traincascade的usage界面,仅仅一个traincascade训练程序就有如此之多的命令。翻遍目前网上介绍Adaboost级联分类器的文章,没有一篇文章能够完整的介绍上面所有命令的原理,甚至有些文章还存在错误,实在让人头疼。
基于知识共享的原则,我把这几个月分析代码的结果写成一个系列分享给出来,希望能够对OpenCV中的Adaboost级联分类器做出“盖棺定论”,同时也让大家也不再像我一样“摸着石头过河”。
本系列文章不追求高深的原理(其实是我水平低),力求简单粗暴、看完就能懂。目前OpenCV中的Adaboost级联分类器支持多种特征,考虑到篇幅问题,我选择用最基础的Haar特征进行分析。下面是本系列文章的基本写作思路:
首先,由Haar为引子,分析XML分类器中各个结点数值的含义,介绍Adaboost级联分类器的树状结构。
然后,以DAB(Discrete Adaboost)为基础,介绍traincascade训练程序的原理。
最后,分析最复杂也是效果最好的的GAB(Gentle Adaboost)。
当然由于作者水平有限,难免出现遗漏和错误,真诚的欢迎各位大侠批评指正!接下来进入正题。
(一)Haar特征的生成
既然是结合Haar特征分析Adaboost级联分类器,那么有必要先对Haar特征进行细致的分析。
Haar特征最先由Paul Viola等提出,后经过Rainer Lienhart等扩展引入45°倾斜特征,成为现在OpenCV所使用的的样子。图2展示了目前OpenCV(2.4.11版本)所使用的共计14种Haar特征,包括5种Basic特征、3种Core特征和6种Titled(即45°旋转)特征。
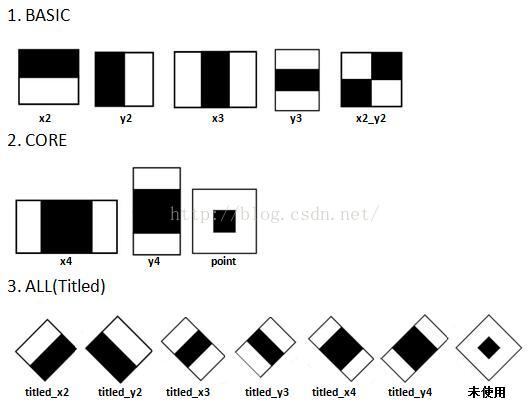
图2 OpenCV中使用的的Haar特征
而图1中haarFeatureParams参数中的mode参数正对应了训练过程中所使用的特征集合:

图3 mode参数
1.如果设置mode为BASIC,则只使用BASIC的5种Haar特征进行训练,训练出的分类器也只包含这5种特征。
2.如果设置mode为CORE,则使用BASIC的5种+CORE的3种Haar特征进行训练。
3.如果设置mode为ALL,则使用BASICA的5种+CORE的3种+ALL的6种Titled共14种特征进行训练。
需要说明,训练程序opencv_trancascade.exe一般默认使用BASIC模式,实际中训练和检测效果已经足够好。不建议使用ALL参数,引入Titled倾斜特征需要多计算一张倾斜积分图,会极大的降低训练和检测速度,而且效果也没有论文中说的那么好。
在实际中,Haar特征可以在检测窗口中由放大+平移产生一系列子特征,但是白:黑区域面积比始终保持不变。
如图4,以x3特征为例,在放大+平移过程中白:黑:白面积比始终是1:1:1。首先在红框所示的检测窗口中生成大小为3个像素的最小x3特征;之后分别沿着x和y平移产生了在检测窗口中不同位置的大量最小3像素x3特征;然后把最小x3特征分别沿着x和y放大,再平移,又产生了一系列大一点x3特征;然后继续放大+平移,重复此过程,直到放大后的x3和检测窗口一样大。这样x3就产生了完整的x3系列特征。
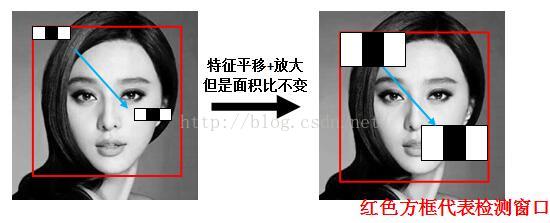
图4 x3特征平移+放大产生一系列子特征示意图
那么这些通过放大+平移的获得的子特征到底有多少个?Rainer Lienhart在其论文中给出了完美的解释:假设检测窗口大小为W*H,矩形特征大小为w*h,X和Y为表示矩形特征在水平和垂直方向的能放大的最大比例系数:
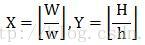
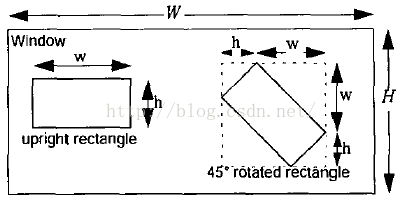

对应于之前的x3特征,当x3特征在24*24大小的检测窗口中时(此时W=H=24,w=3,h=1,X=8,Y=24),一共能产生27600个子特征。除x3外其他一般矩形特征数量计算方法类似,这里不做赘述。另外,我为认为title特征(即图5中的45°rotated reactangle)实用性一般,不再介绍,请查阅论文。
(二)计算Haar特征值
看到这里,您应该明白了大量的Haar特征是如何产生的。当有了大量的Haar特征用于训练和检测时,接下来的问题是如何计算Haar特征值。
按照OpenCV代码,Haar特征值=白色区域内图像像素和 x 权重 - 黑色区域内图像像素和 x 权重:

对于x3和y3特征,weightwhite = 1且weightblack = 2;对于point特征,weightwhite
= 1且weightblack = 8;其余11种特征均为weightwhite = weightblack = 1。这也就是其他文章中提到的所谓“白色区域像素和减去黑色区域像素和”,只不过是加权相减而已(在XML文件中,每一个Haar特征都被保存在2~3个形如<x
y width height weight>的标签中,其中x和y代表Haar矩形左上角点以检测窗口的左上角为原点的坐标,width和height代表矩形框的宽和高,而weight则对应了上面说的权重值,例如图6中的左边Haar特征应该表示为<4 2 12 8 1.0>和<4 2 12 4 -2.0>)。
为什么要设置这种加权相减,而不是直接相减?请仔细观察图2中的特征,不难发现x3、y3、point特征黑白面积不相等,而其他特征黑白面积相等。设置权值就是为了抵消面积不等带来的影响,保证所有Haar特征的特征值在“灰度分布绝对均匀的图像”中为0(这种图像不存在,只是理论中的)。
了解了特征值如何计算之后,再来看看不同的特征值的含义是什么。我选取了MIT人脸库中2706个大小为20*20的人脸正样本图像,计算如图6位置的Haar特征值,结果如图7。
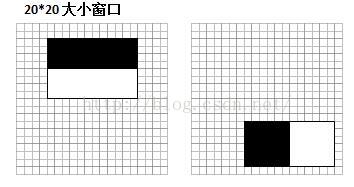
图6 Haar特征位置示意图(左边对应人眼区域,右边无具体意义)
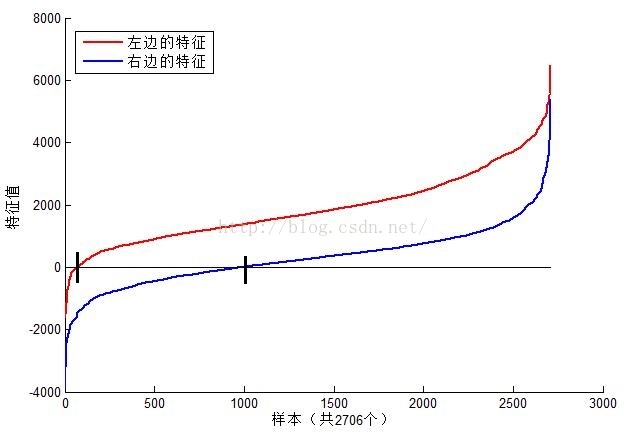
图7 图6的2个Haar特征在MIT人脸样本中特征值分布图(左边特征结果为红色,右边蓝色)
可以看到,图6中2个不同Haar特征在同一组样本中具有不同的特征值分布,左边特征计算出的特征值基本都大于0(对样本的区分度大),而右边特征的特征值基本均匀分布于0两侧(对样本的区分度)。所以,正是由于样本中Haar特征值分布不均匀,导致了不同Haar特征分类效果不同。显而易见,对正负样本区分度越大的特征分类效果越好,即红色曲线对应图6中的的左边Haar特征分类效果好于右边Haar特征。
那么看到这里,应该理解了下面2个问题:
1. 在检测窗口通过平移+放大可以产生一系列Haar特征,这些特征由于位置和大小不同,分类效果也不同;
2. 通过计算Haar特征的特征值,可以有将图像矩阵映射为1维特征值,有效实现了降维。
(三)Haar特征值归一化
本节属于实现细节,只关心原理的朋友可以跳过。
细心的朋友可能已经从图7中发现,仅仅一个12*18大小的Haar特征计算出的特征值变化范围从-2000~+6000,跨度非常大。这种跨度大的特性不利于量化评定特征值,所以需要进行“归一化”,压缩特征值范围。假设当前检测窗口中的图像为i(x,y),当前检测窗口为w*h大小(例如图6中为20*20大小),OpenCV采用如下方式“归一化”:
1. 计算检测窗口中图像的灰度值和灰度值平方和:

2. 计算平均值:

3. 计算归一化因子:

4. 归一化特征值:

之后使用归一化后的特征值normValue与阈值对比(见下节)。
(四)积分图
积分图是被各种文章写了无数次,考虑到文章完整性,我硬着头皮再写一遍。
之前我们分析到,仅仅在24*24大小的窗口,通过平移+缩放就可以产生数十万计大小不一、位置各异的Haar特征。在一个窗口内就有这么多Haar特征,而检测窗口是不断移动的,那么如何快速的计算这些Haar特征的特征值就是一个非常重要的问题了,所以才需要引入积分图。
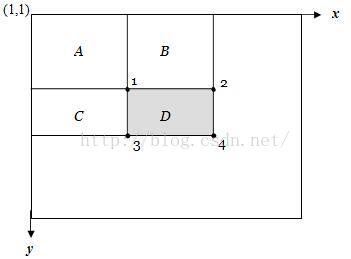
对于图像中任何一点i(x,y),定义其积分图为ii(x,y)为:
其中i(x',y')为点(x',y')处的原始灰度图。这样就定义了一张类似于数学中“积分”的积分图。有了积分图ii(x,y)后,只需要做有限次操作就能获得任意位置的Haar特征值。
-------------------------------------------
参考文献:
[1] Paul Viola and Michael J. Jones. Rapid Object Detection using a Boosted Cascade of Simple Features. IEEE CVPR, 2001.
[2] Rainer Lienhart and Jochen Maydt. An Extended Set ofHaar-like Features for Rapid Object Detection. IEEE ICIP 2002, Vol. 1, pp. 900-903, Sep. 2002.
一、LBP特征的背景介绍
LBP指局部二值模式,英文全称:Local Binary Pattern,是一种用来描述图像局部特征的算子,LBP特征具有灰度不变性和旋转不变性等显著优点。它是由T. Ojala, M.Pietikäinen, 和 D. Harwood [1][2]在1994年提出,由于LBP特征计算简单、效果较好,因此LBP特征在计算机视觉的许多领域都得到了广泛的应用,LBP特征比较出名的应用是用在人脸识别和目标检测中,在计算机视觉开源库OpenCV中有使用LBP特征进行人脸识别的接口,也有用LBP特征训练目标检测分类器的方法,Opencv实现了LBP特征的计算,但没有提供一个单独的计算LBP特征的接口。
二、LBP特征的原理
1、原始LBP特征描述及计算方法
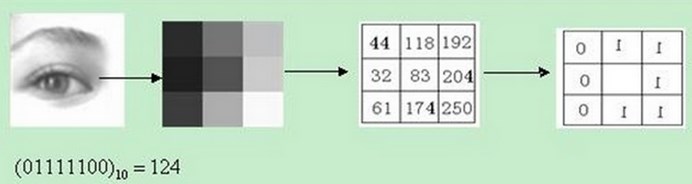
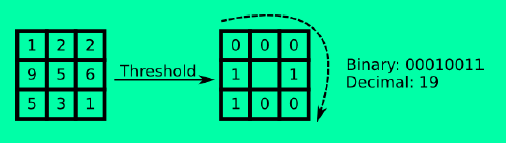
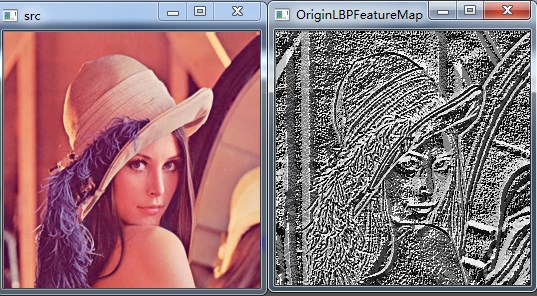
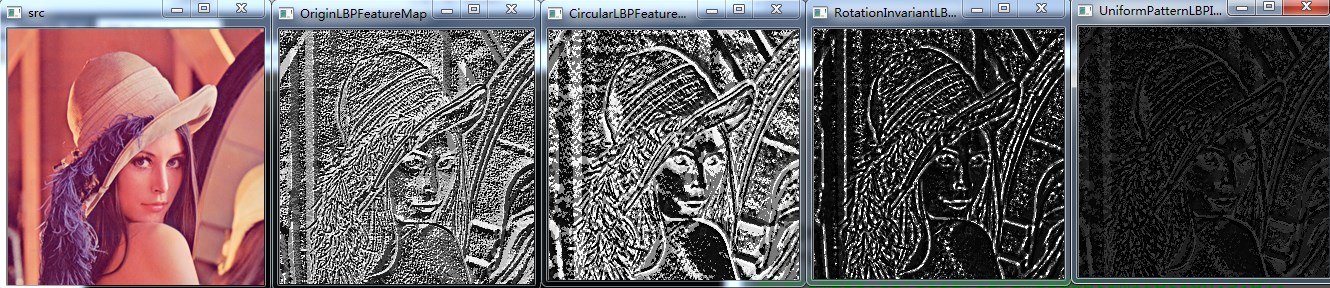
原始的LBP算子定义在像素3*3的邻域内,以邻域中心像素为阈值,相邻的8个像素的灰度值与邻域中心的像素值进行比较,若周围像素大于中心像素值,则该像素点的位置被标记为1,否则为0。这样,3*3邻域内的8个点经过比较可产生8位二进制数,将这8位二进制数依次排列形成一个二进制数字,这个二进制数字就是中心像素的LBP值,LBP值共有2828种可能,因此LBP值有256种。中心像素的LBP值反映了该像素周围区域的纹理信息。
备注:计算LBP特征的图像必须是灰度图,如果是彩色图,需要先转换成灰度图。
上述过程用图像表示为:
将上述过程用公式表示为:
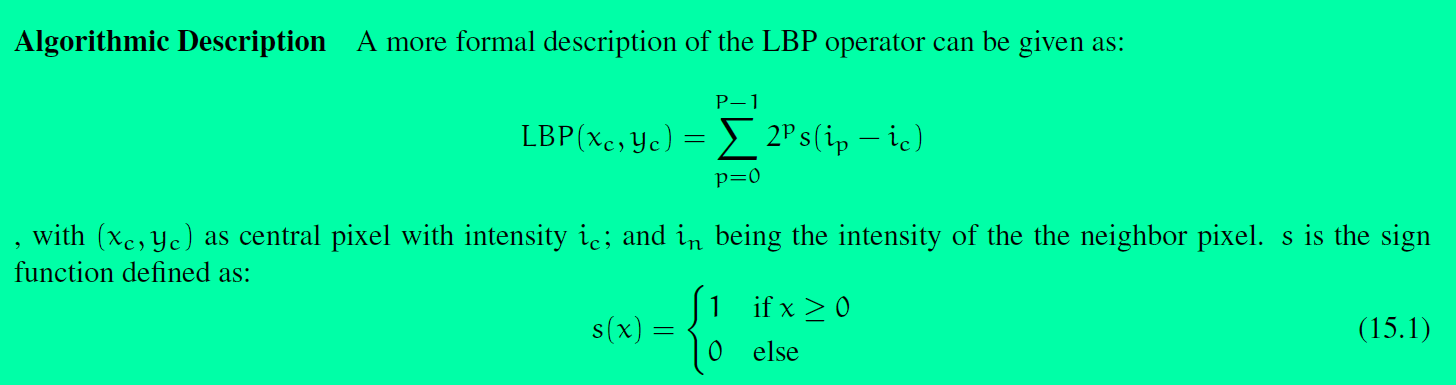
(xc,yc)(xc,yc)为中心像素的坐标,pp为邻域的第pp个像素,ipip为邻域像素的灰度值,icic为中心像素的灰度值,s(x)s(x)为符号函数
原始LBP特征计算代码(Opencv下):
//原始LBP特征计算
template <typename _tp>
void getOriginLBPFeature(InputArray _src,OutputArray _dst)
{
Mat src = _src.getMat();
_dst.create(src.rows-2,src.cols-2,CV_8UC1);
Mat dst = _dst.getMat();
dst.setTo(0);
for(int i=1;i<src.rows-1;i++)
{
for(int j=1;j<src.cols-1;j++)
{
_tp center = src.at<_tp>(i,j);
unsigned char lbpCode = 0;
lbpCode |= (src.at<_tp>(i-1,j-1) > center) << 7;
lbpCode |= (src.at<_tp>(i-1,j ) > center) << 6;
lbpCode |= (src.at<_tp>(i-1,j+1) > center) << 5;
lbpCode |= (src.at<_tp>(i ,j+1) > center) << 4;
lbpCode |= (src.at<_tp>(i+1,j+1) > center) << 3;
lbpCode |= (src.at<_tp>(i+1,j ) > center) << 2;
lbpCode |= (src.at<_tp>(i+1,j-1) > center) << 1;
lbpCode |= (src.at<_tp>(i ,j-1) > center) << 0;
dst.at<uchar>(i-1,j-1) = lbpCode;
}
}
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
测试结果:
2、LBP特征的改进版本
在原始的LBP特征提出以后,研究人员对LBP特征进行了很多的改进,因此产生了许多LBP的改进版本。
2.1 圆形LBP特征(Circular LBP or Extended LBP)
由于原始LBP特征使用的是固定邻域内的灰度值,因此当图像的尺度发生变化时,LBP特征的编码将会发生错误,LBP特征将不能正确的反映像素点周围的纹理信息,因此研究人员对其进行了改进[3]。基本的 LBP 算子的最大缺陷在于它只覆盖了一个固定半径范围内的小区域,这显然不能满足不同尺寸和频率纹理的需要。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala 等对 LBP 算子进行了改进,将 3×3 邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域,改进后的 LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。从而得到了诸如半径为R的圆形区域内含有P个采样点的LBP算子:
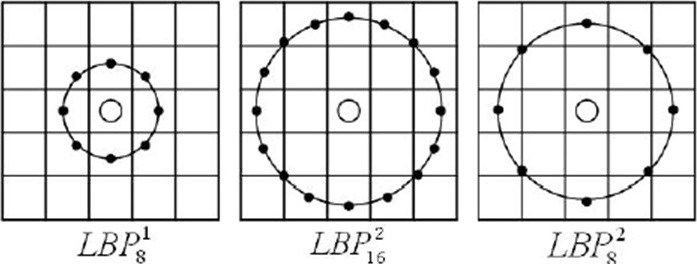
这种LBP特征叫做Extended LBP,也叫Circular LBP。使用可变半径的圆对近邻像素进行编码,可以得到如下的近邻:
对于给定中心点(xc,yc)(xc,yc),其邻域像素位置为(xp,yp)(xp,yp),p∈Pp∈P,其采样点(xp,yp)(xp,yp)用如下公式计算:

RR是采样半径,pp是第pp个采样点,PP是采样数目。由于计算的值可能不是整数,即计算出来的点不在图像上,我们使用计算出来的点的插值点。目的的插值方法有很多,Opencv使用的是双线性插值,双线性插值的公式如下: 
通过LBP特征的定义可以看出,LBP特征对光照变化是鲁棒的,其效果如下图所示:

//圆形LBP特征计算,这种方法适于理解,但在效率上存在问题,声明时默认neighbors=8
template <typename _tp>
void getCircularLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors)
{
Mat src = _src.getMat();
//LBP特征图像的行数和列数的计算要准确
_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);
Mat dst = _dst.getMat();
dst.setTo(0);
//循环处理每个像素
for(int i=radius;i<src.rows-radius;i++)
{
for(int j=radius;j<src.cols-radius;j++)
{
//获得中心像素点的灰度值
_tp center = src.at<_tp>(i,j);
unsigned char lbpCode = 0;
for(int k=0;k<neighbors;k++)
{
//根据公式计算第k个采样点的坐标,这个地方可以优化,不必每次都进行计算radius*cos,radius*sin
float x = i + static_cast<float>(radius * \
cos(2.0 * CV_PI * k / neighbors));
float y = j - static_cast<float>(radius * \
sin(2.0 * CV_PI * k / neighbors));
//根据取整结果进行双线性插值,得到第k个采样点的灰度值
//1.分别对x,y进行上下取整
int x1 = static_cast<int>(floor(x));
int x2 = static_cast<int>(ceil(x));
int y1 = static_cast<int>(floor(y));
int y2 = static_cast<int>(ceil(y));
//2.计算四个点(x1,y1),(x1,y2),(x2,y1),(x2,y2)的权重
//下面的权重计算方式有个问题,如果四个点都相等,则权重全为0,计算出来的插值为0
//float w1 = (x2-x)*(y2-y); //(x1,y1)
//float w2 = (x2-x)*(y-y1); //(x1,y2)
//float w3 = (x-x1)*(y2-y); //(x2,y1)
//float w4 = (x-x1)*(y-y1); //(x2,y2)
//将坐标映射到0-1之间
float tx = x - x1;
float ty = y - y1;
//根据0-1之间的x,y的权重计算公式计算权重
float w1 = (1-tx) * (1-ty);
float w2 = tx * (1-ty);
float w3 = (1-tx) * ty;
float w4 = tx * ty;
//3.根据双线性插值公式计算第k个采样点的灰度值
float neighbor = src.at<_tp>(x1,y1) * w1 + src.at<_tp>(x1,y2) *w2 \
+ src.at<_tp>(x2,y1) * w3 +src.at<_tp>(x2,y2) *w4;
//通过比较获得LBP值,并按顺序排列起来
lbpCode |= (neighbor>center) <<(neighbors-k-1);
}
dst.at<uchar>(i-radius,j-radius) = lbpCode;
}
}
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
//圆形LBP特征计算,效率优化版本,声明时默认neighbors=8
template <typename _tp>
void getCircularLBPFeatureOptimization(InputArray _src,OutputArray _dst,int radius,int neighbors)
{
Mat src = _src.getMat();
//LBP特征图像的行数和列数的计算要准确
_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);
Mat dst = _dst.getMat();
dst.setTo(0);
for(int k=0;k<neighbors;k++)
{
//计算采样点对于中心点坐标的偏移量rx,ry
float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));
float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));
//为双线性插值做准备
//对采样点偏移量分别进行上下取整
int x1 = static_cast<int>(floor(rx));
int x2 = static_cast<int>(ceil(rx));
int y1 = static_cast<int>(floor(ry));
int y2 = static_cast<int>(ceil(ry));
//将坐标偏移量映射到0-1之间
float tx = rx - x1;
float ty = ry - y1;
//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
float w1 = (1-tx) * (1-ty);
float w2 = tx * (1-ty);
float w3 = (1-tx) * ty;
float w4 = tx * ty;
//循环处理每个像素
for(int i=radius;i<src.rows-radius;i++)
{
for(int j=radius;j<src.cols-radius;j++)
{
//获得中心像素点的灰度值
_tp center = src.at<_tp>(i,j);
//根据双线性插值公式计算第k个采样点的灰度值
float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 \
+ src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4;
//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1);
}
}
}
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
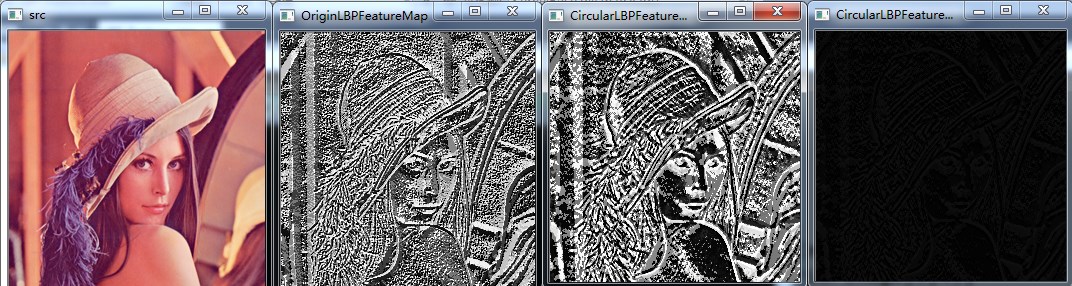
测试结果:
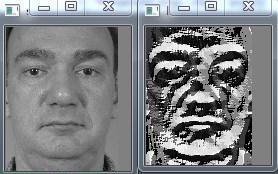
radius = 3,neighbors = 8
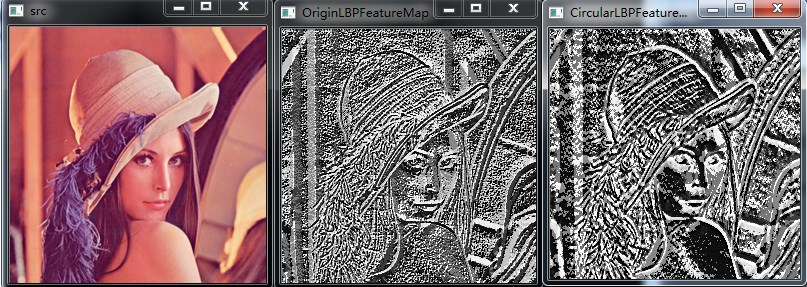
第三幅图像为radius = 3,neighbors = 8,第四幅图像为radius = 1,neighbors = 8,从实验结果可以看出,半径越小,图像纹理越精细
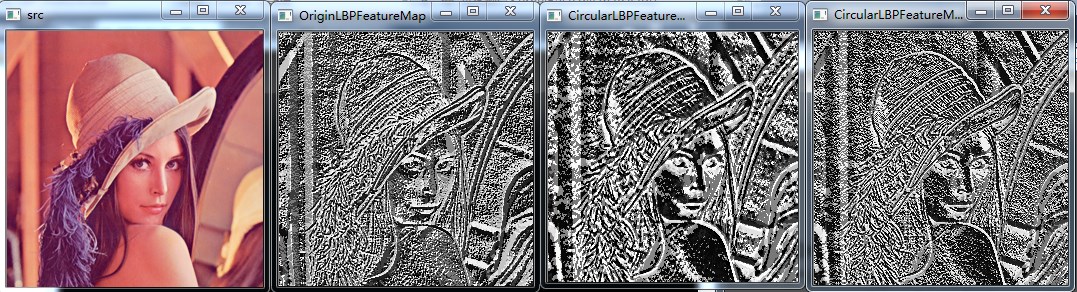
第三幅图像为radius = 3,neighbors = 8,第四幅图像为radius = 3,neighbors = 4,从实验结果可以看出,邻域数目越小,图像亮度越低,合理,因此4位的灰度值很小
由于我代码的问题,不能使neighbors >8,可改进
2.2 旋转不变LBP特征
从上面可以看出,上面的LBP特征具有灰度不变性,但还不具备旋转不变性,因此研究人员又在上面的基础上进行了扩展,提出了具有旋转不变性的LBP特征。
首先不断的旋转圆形邻域内的LBP特征,根据选择得到一系列的LBP特征值,从这些LBP特征值选择LBP特征值最小的作为中心像素点的LBP特征。具体做法如下图所示:
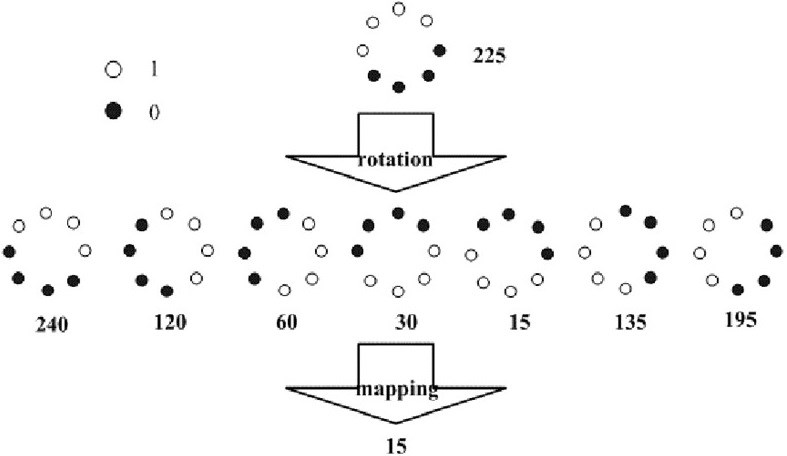
如图,通过对得到的LBP特征进行旋转,得到一系列的LBP特征值,最终将特征值最小的一个特征模式作为中心像素点的LBP特征。
//旋转不变圆形LBP特征计算,声明时默认neighbors=8
template <typename _tp>
void getRotationInvariantLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors)
{
Mat src = _src.getMat();
//LBP特征图像的行数和列数的计算要准确
_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);
Mat dst = _dst.getMat();
dst.setTo(0);
for(int k=0;k<neighbors;k++)
{
//计算采样点对于中心点坐标的偏移量rx,ry
float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));
float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));
//为双线性插值做准备
//对采样点偏移量分别进行上下取整
int x1 = static_cast<int>(floor(rx));
int x2 = static_cast<int>(ceil(rx));
int y1 = static_cast<int>(floor(ry));
int y2 = static_cast<int>(ceil(ry));
//将坐标偏移量映射到0-1之间
float tx = rx - x1;
float ty = ry - y1;
//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
float w1 = (1-tx) * (1-ty);
float w2 = tx * (1-ty);
float w3 = (1-tx) * ty;
float w4 = tx * ty;
//循环处理每个像素
for(int i=radius;i<src.rows-radius;i++)
{
for(int j=radius;j<src.cols-radius;j++)
{
//获得中心像素点的灰度值
_tp center = src.at<_tp>(i,j);
//根据双线性插值公式计算第k个采样点的灰度值
float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 \
+ src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4;
//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1);
}
}
}
//进行旋转不变处理
for(int i=0;i<dst.rows;i++)
{
for(int j=0;j<dst.cols;j++)
{
unsigned char currentValue = dst.at<uchar>(i,j);
unsigned char minValue = currentValue;
for(int k=1;k<neighbors;k++)
{
//循环左移
unsigned char temp = (currentValue>>(neighbors-k)) | (currentValue<<k);
if(temp < minValue)
{
minValue = temp;
}
}
dst.at<uchar>(i,j) = minValue;
}
}
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
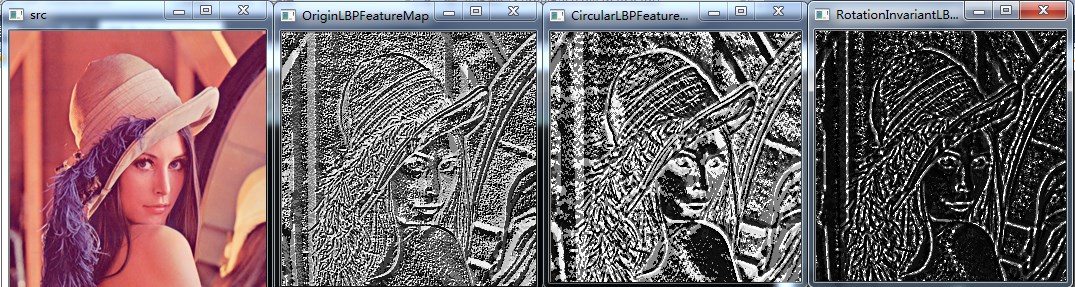
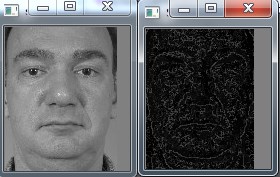
测试结果:
radius = 3,neighbors = 8,最后一幅是旋转不变LBP特征
2.3 Uniform Pattern LBP特征
Uniform Pattern,也被称为等价模式或均匀模式,由于一个LBP特征有多种不同的二进制形式,对于半径为R的圆形区域内含有P个采样点的LBP算子将会产生2P种模式。很显然,随着邻域集内采样点数的增加,二进制模式的种类是以指数形式增加的。例如:5×5邻域内20个采样点,有220=1,048,576种二进制模式。这么多的二进制模式不利于纹理的提取、分类、识别及存取。例如,将LBP算子用于纹理分类或人脸识别时,常采用LBP模式的统计直方图来表达图像的信息,而较多的模式种类将使得数据量过大,且直方图过于稀疏。因此,需要对原始的LBP模式进行降维,使得数据量减少的情况下能最好的表示图像的信息。
为了解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”(Uniform Pattern)来对LBP算子的模式种类进行降维。Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共四次跳变)。通过这样的改进,二进制模式的种类大大减少,而不会丢失任何信息。模式数量由原来的2P种减少为 P ( P-1)+2种,其中P表示邻域集内的采样点数。对于3×3邻域内8个采样点来说,二进制模式由原始的256种减少为58种,即:它把值分为59类,58个uniform pattern为一类,其它的所有值为第59类。这样直方图从原来的256维变成59维。这使得特征向量的维数更少,并且可以减少高频噪声带来的影响。
具体实现:采样点数目为8个,即LBP特征值有28种,共256个值,正好对应灰度图像的0-255,因此原始的LBP特征图像是一幅正常的灰度图像,而等价模式LBP特征,根据0-1跳变次数,将这256个LBP特征值分为了59类,从跳变次数上划分:跳变0次—2个,跳变1次—0个,跳变2次—56个,跳变3次—0个,跳变4次—140个,跳变5次—0个,跳变6次—56个,跳变7次—0个,跳变8次—2个。共9种跳变情况,将这256个值进行分配,跳变小于2次的为等价模式类,共58个,他们对应的值按照从小到大分别编码为1—58,即它们在LBP特征图像中的灰度值为1—58,而除了等价模式类之外的混合模式类被编码为0,即它们在LBP特征中的灰度值为0,因此等价模式LBP特征图像整体偏暗。
//等价模式LBP特征计算
template <typename _tp>
void getUniformPatternLBPFeature(InputArray _src,OutputArray _dst,int radius,int neighbors)
{
Mat src = _src.getMat();
//LBP特征图像的行数和列数的计算要准确
_dst.create(src.rows-2*radius,src.cols-2*radius,CV_8UC1);
Mat dst = _dst.getMat();
dst.setTo(0);
//LBP特征值对应图像灰度编码表,直接默认采样点为8位
uchar temp = 1;
uchar table[256] = {0};
for(int i=0;i<256;i++)
{
if(getHopTimes(i)<3)
{
table[i] = temp;
temp++;
}
}
//是否进行UniformPattern编码的标志
bool flag = false;
//计算LBP特征图
for(int k=0;k<neighbors;k++)
{
if(k==neighbors-1)
{
flag = true;
}
//计算采样点对于中心点坐标的偏移量rx,ry
float rx = static_cast<float>(radius * cos(2.0 * CV_PI * k / neighbors));
float ry = -static_cast<float>(radius * sin(2.0 * CV_PI * k / neighbors));
//为双线性插值做准备
//对采样点偏移量分别进行上下取整
int x1 = static_cast<int>(floor(rx));
int x2 = static_cast<int>(ceil(rx));
int y1 = static_cast<int>(floor(ry));
int y2 = static_cast<int>(ceil(ry));
//将坐标偏移量映射到0-1之间
float tx = rx - x1;
float ty = ry - y1;
//根据0-1之间的x,y的权重计算公式计算权重,权重与坐标具体位置无关,与坐标间的差值有关
float w1 = (1-tx) * (1-ty);
float w2 = tx * (1-ty);
float w3 = (1-tx) * ty;
float w4 = tx * ty;
//循环处理每个像素
for(int i=radius;i<src.rows-radius;i++)
{
for(int j=radius;j<src.cols-radius;j++)
{
//获得中心像素点的灰度值
_tp center = src.at<_tp>(i,j);
//根据双线性插值公式计算第k个采样点的灰度值
float neighbor = src.at<_tp>(i+x1,j+y1) * w1 + src.at<_tp>(i+x1,j+y2) *w2 \
+ src.at<_tp>(i+x2,j+y1) * w3 +src.at<_tp>(i+x2,j+y2) *w4;
//LBP特征图像的每个邻居的LBP值累加,累加通过与操作完成,对应的LBP值通过移位取得
dst.at<uchar>(i-radius,j-radius) |= (neighbor>center) <<(neighbors-k-1);
//进行LBP特征的UniformPattern编码
if(flag)
{
dst.at<uchar>(i-radius,j-radius) = table[dst.at<uchar>(i-radius,j-radius)];
}
}
}
}
}
//计算跳变次数
int getHopTimes(int n)
{
int count = 0;
bitset<8> binaryCode = n;
for(int i=0;i<8;i++)
{
if(binaryCode[i] != binaryCode[(i+1)%8])
{
count++;
}
}
return count;
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
- 54
- 55
- 56
- 57
- 58
- 59
- 60
- 61
- 62
- 63
- 64
- 65
- 66
- 67
- 68
- 69
- 70
- 71
- 72
- 73
- 74
- 75
- 76
- 77
- 78
- 79
- 80
- 81
测试结果:
radius = 3,neighbors = 8,最后一幅是等价模式LBP特征
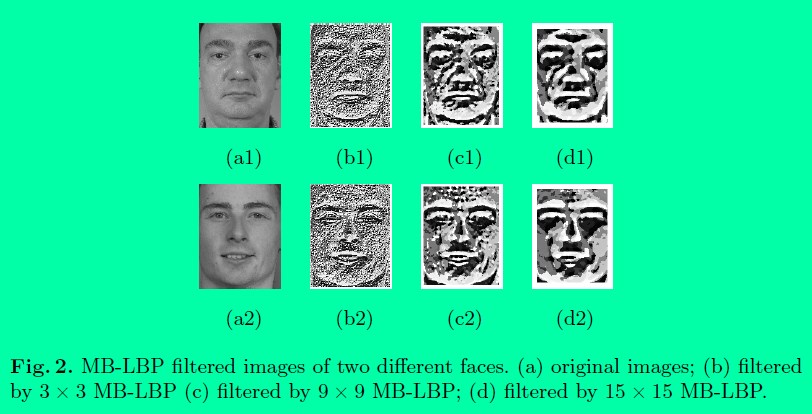
2.4 MB-LBP特征
MB-LBP特征,全称为Multiscale Block LBP,来源于论文[9],中科院的人发明的,在Traincascade级联目标训练检测中的LBP特征使用的就是MB-LBP。
MB-LBP的原理:
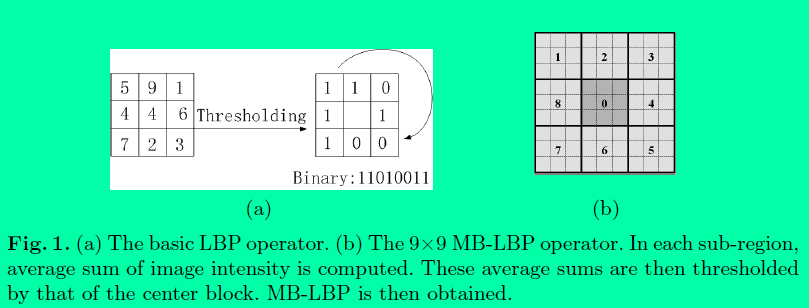
将图像分成一个个小块(Block),每个小块再分为一个个的小区域(类似于HOG中的cell),小区域内的灰度平均值作为当前小区域的灰度值,与周围小区域灰度进行比较形成LBP特征,生成的特征称为MB-LBP,Block大小为3*3,则小区域的大小为1,就是原始的LBP特征,上图的Block大小为9*9,小区域的大小为3*3。
不同Block提取的MB-LBP特征如图所示:
计算MB-LBP代码:
//MB-LBP特征的计算
void getMultiScaleBlockLBPFeature(InputArray _src,OutputArray _dst,int scale)
{
Mat src = _src.getMat();
Mat dst = _dst.getMat();
//定义并计算积分图像
int cellSize = scale / 3;
int offset = cellSize / 2;
Mat cellImage(src.rows-2*offset,src.cols-2*offset,CV_8UC1);
for(int i=offset;i<src.rows-offset;i++)
{
for(int j=offset;j<src.cols-offset;j++)
{
int temp = 0;
for(int m=-offset;m<offset+1;m++)
{
for(int n=-offset;n<offset+1;n++)
{
temp += src.at<uchar>(i+n,j+m);
}
}
temp /= (cellSize*cellSize);
cellImage.at<uchar>(i-cellSize/2,j-cellSize/2) = uchar(temp);
}
}
getOriginLBPFeature<uchar>(cellImage,dst);
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
效果图:
Block=3,即原始的LBP特征 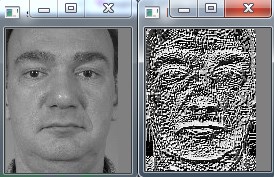
Block=9 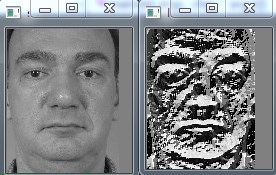
Block=15
到此为止,还没有结束,作者对得到LBP特征又进行了均值模式编码,通过对得到的特征图求直方图,得到了LBP特征值0-255之间(0-255即直方图中的bin)的特征数量,通过对bin中的数值进行排序,通过权衡,将排序在前63位的特征值看作是等价模式类,其他的为混合模式类,总共64类,作者在论文中称之为SEMB-LBP(Statistically Effective MB-LBP )。类似于等价模式LBP,等价模式的LBP的等价模式类为58种,混合模式类1种,共59种。二者除了等价模式类的数量不同之外,主要区别在于:对等价模式类的定义不同,等价模式LBP是根据0-1的跳变次数定义的,而SEMB-LBP是通过对直方图排序得到的。当然下一步要做的就是将SEMB-LBP变为LBPH进行使用。
计算SEMB-LBP的代码
//求SEMB-LBP
void SEMB_LBPFeature(InputArray _src,OutputArray _dst,int scale)
{
Mat dst=_dst.getMat();
Mat MB_LBPImage;
getMultiScaleBlockLBPFeature(_src,MB_LBPImage,scale);
//imshow("dst",dst);
Mat histMat;
int histSize = 256;
float range[] = {float(0),float(255)};
const float* ranges = {range};
//计算LBP特征值0-255的直方图
calcHist(&MB_LBPImage,1,0,Mat(),histMat,1,&histSize,&ranges,true,false);
histMat.reshape(1,1);
vector<float> histVector(histMat.rows*histMat.cols);
uchar table[256];
memset(table,64,256);
if(histMat.isContinuous())
{
//histVector = (int *)(histMat.data);
//将直方图histMat变为vector向量histVector
histVector.assign((float*)histMat.datastart,(float*)histMat.dataend);
vector<float> histVectorCopy(histVector);
//对histVector进行排序,即对LBP特征值的数量进行排序,降序排列
sort(histVector.begin(),histVector.end(),greater<float>());
for(int i=0;i<63;i++)
{
for(int j=0;j<histVectorCopy.size();j++)
{
if(histVectorCopy[j]==histVector[i])
{
//得到类似于Uniform的编码表
table[j]=i;
}
}
}
}
dst = MB_LBPImage;
//根据编码表得到SEMB-LBP
for(int i=0;i<dst.rows;i++)
{
for(int j=0;j<dst.cols;j++)
{
dst.at<uchar>(i,j) = table[dst.at<uchar>(i,j)];
}
}
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
测试结果:
第二幅为对MB-LBP进行编码得到的SEMB-LBP图像
总结:MB-LBP有点类似于先将图像进行平滑处理,然后再求LBP特征。而SEMB-LBP是在MB-LBP进行编码后的图像。类似于等价模式LBP,先求LBP特征,再用等价模式进行编码。当Scale=3时,MB-LBP和SEMB-LBP就是LBP和等价模式LBP。想具体了解需要去看论文,当然要自己实现才会理解的更透彻。
三、LBPH——图像的LBP特征向量
LBPH,Local Binary Patterns Histograms,即LBP特征的统计直方图,LBPH将LBP特征与图像的空间信息结合在一起。这种表示方法由Ahonen等人在论文[3]中提出,他们将LBP特征图像分成m个局部块,并提取每个局部块的直方图,然后将这些直方图依次连接在一起形成LBP特征的统计直方图,即LBPH。
一幅图像具体的计算LBPH的过程(以Opencv中的人脸识别为例):
- 计算图像的LBP特征图像,在上面已经讲过了。
- 将LBP特征图像进行分块,Opencv中默认将LBP特征图像分成8行8列64块区域
- 计算每块区域特征图像的直方图cell_LBPH,将直方图进行归一化,直方图大小为1∗numPatterns1∗numPatterns
- 将上面计算的每块区域特征图像的直方图按分块的空间顺序依次排列成一行,形成LBP特征向量,大小为1∗(numPatterns∗64)1∗(numPatterns∗64)
- 用机器学习的方法对LBP特征向量进行训练,用来检测和识别目标
举例说明LBPH的维度:
采样点为8个,如果用的是原始的LBP或Extended LBP特征,其LBP特征值的模式为256种,则一幅图像的LBP特征向量维度为:64*256=16384维,
而如果使用的UniformPatternLBP特征,其LBP值的模式为59种,其特征向量维度为:64*59=3776维,可以看出,使用等价模式特征,其特征向量的维度大大减少,
这意味着使用机器学习方法进行学习的时间将大大减少,而性能上没有受到很大影响。
Opencv的人脸识别使用的是Extended LBP
计算LBPH的代码如下:
//计算LBP特征图像的直方图LBPH
Mat getLBPH(InputArray _src,int numPatterns,int grid_x,int grid_y,bool normed)
{
Mat src = _src.getMat();
int width = src.cols / grid_x;
int height = src.rows / grid_y;
//定义LBPH的行和列,grid_x*grid_y表示将图像分割成这么些块,numPatterns表示LBP值的模式种类
Mat result = Mat::zeros(grid_x * grid_y,numPatterns,CV_32FC1);
if(src.empty())
{
return result.reshape(1,1);
}
int resultRowIndex = 0;
//对图像进行分割,分割成grid_x*grid_y块,grid_x,grid_y默认为8
for(int i=0;i<grid_x;i++)
{
for(int j=0;j<grid_y;j++)
{
//图像分块
Mat src_cell = Mat(src,Range(i*height,(i+1)*height),Range(j*width,(j+1)*width));
//计算直方图
Mat hist_cell = getLocalRegionLBPH(src_cell,0,(numPattern-1),true);
//将直方图放到result中
Mat rowResult = result.row(resultRowIndex);
hist_cell.reshape(1,1).convertTo(rowResult,CV_32FC1);
resultRowIndex++;
}
}
return result.reshape(1,1);
}
//计算一个LBP特征图像块的直方图
Mat getLocalRegionLBPH(const Mat& src,int minValue,int maxValue,bool normed)
{
//定义存储直方图的矩阵
Mat result;
//计算得到直方图bin的数目,直方图数组的大小
int histSize = maxValue - minValue + 1;
//定义直方图每一维的bin的变化范围
float range[] = { static_cast<float>(minValue),static_cast<float>(maxValue + 1) };
//定义直方图所有bin的变化范围
const float* ranges = { range };
//计算直方图,src是要计算直方图的图像,1是要计算直方图的图像数目,0是计算直方图所用的图像的通道序号,从0索引
//Mat()是要用的掩模,result为输出的直方图,1为输出的直方图的维度,histSize直方图在每一维的变化范围
//ranges,所有直方图的变化范围(起点和终点)
calcHist(&src,1,0,Mat(),result,1,&histSize,&ranges,true,false);
//归一化
if(normed)
{
result /= (int)src.total();
}
//结果表示成只有1行的矩阵
return result.reshape(1,1);
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
- 43
- 44
- 45
- 46
- 47
- 48
- 49
- 50
- 51
- 52
- 53
总结:上面的LBP特征都是较经典的LBP特征,除此之外,LBP特征还有大量的变种,如TLBP(中心像素与周围所有像素比较,而不是根据采样点的数目),DLBP(编码标准四个方向的灰度变化,每个方向上用2比特编码),MLBP(将中心像素值替换成采样点像素的平均值),MB-LBP(上面有介绍),VLBP(没太看懂),RGB-LBP(RGB图像分别计算LBP,然后连接在一起)等,具体的需要自己去研究,可参考维基百科
四、LBP特征的匹配与使用
1、LBP特征用在目标检测中
人脸检测比较出名的是Haar+Adaboost方法,其实目前的Opencv也支持LBP+Adaboost和HOG+Adaboost方法进行目标检测,从目前我的使用效果来看,LBP+Adaboost方法用在目标检测中的效果比Haar特征、HOG特征都要好(HOG特征用的不多,主要是Haar和LBP),而且LBP特征的训练速度比Haar和HOG都要快很多。在LBP+Adaboost中,LBP特征主要是用作输入的训练数据(特征),使用的LBP特征应该是DLBP(维基百科上说的,待考证,没太看明白Cascade中LBP特征的计算方式),具体用法需要看源码。Opencv的TrainCascade中使用的LBP特征是MB-LBP。
老外的对Opencv级联检测中使用的LBP的解释(非常好,自己读,就不翻译了),在看这个之前最好是运行过TrainCascade来训练目标检测的分类器,并使用过LBP特征训练,调节过参数[8]:
OpenCV ships with a tool called traincascade that trains LBP, Haar and HOG. Specifically for face detection they even ship the 3000-image dataset of 24x24 pixel faces, in the format needed bytraincascade.
In my experience, of the three types traincascade supports, LBP takes the least time to train, taking on the order of hours rather than days for Haar.
A quick overview of its training process is that for the given number of stages (a decent choice is 20), it attempts to find features that reject as many non-faces as possible while not rejecting the faces. The balance between rejecting non-faces and keeping faces is controlled by the mininum hit rate (OpenCV chose 99.5%) and false alarm rate (OpenCV chose 50%). The specific meta-algorithm used for crafting OpenCV’s own LBP cascade is Gentle AdaBoost (GAB).
The variant of LBP implemented in OpenCV is described here:
Shengcai Liao, Xiangxin Zhu, Zhen Lei, Lun Zhang and Stan Z. Li. Learning Multi-scale Block Local Binary Patterns for Face Recognition. International Conference on Biometrics (ICB), 2007, pp. 828-837.
What it amounts to in practice in OpenCV with default parameters is:
OpenCV LBP Cascade Runtime Overview
The detector examines 24x24 windows within the image looking for a face. Stepping from Stage 1 to 20 of the cascade classifier, if it can show that the current 24x24 window is likely not a face, it rejects it and moves over the window by one or two pixels over to the next position; Otherwise it proceeds to the next stage.
During each stage, 3-10 or so LBP features are examined. Every LBP feature has an offset within the window and a size, and the area it covers is fully contained within the current window. Evaluating an LBP feature at a given position can result in either a pass or fail. Depending on whether an LBP feature succeeds or fails, a positive or negative weight particular to that feature is added to an accumulator.
Once all of a stage’s LBP features are evaluated, the accumulator’s value is compared to the stage threshold. A stage fails if the accumulator is below the threshold, and passes if it is above. Again, if a stage fails, the cascade is exited and the window moves to the next position.
LBP feature evaluation is relatively simple. At that feature’s offset within the window, nine rectangles are laid out in a 3x3 configuration. These nine rectangles are all the same size for a particular LBP feature, ranging from 1x1 to 8x8.
The sum of all the pixels in the nine rectangles are computed, in other words their integral. Then, the central rectangle’s integral is compared to that of its eight neighbours. The result of these eight comparisons is eight bits (1 or 0), which are assembled in an 8-bit LBP.
This 8-bit bitvector is used as an index into a 2^8 == 256-bit LUT, computed by the training process and particular to each LBP feature, that determines whether the LBP feature passed or failed.
2、LBP用在人脸识别中
LBP在人脸识别中比较出名,从源码上来看,人脸识别中LBPH的使用主要是用来进行直方图的比较,通过直方图的比较来判断目标的类别。在Opencv的基于LBP的人脸识别的实现中使用的LBP特征是Extendes LBP,即圆形LBP特征。参考的论文为文献[10]。
LBPH训练主要是提取输入的图像的LBPH保存,当进行识别时,遍历保存的LBPH,找到输入图像与训练图像方差最小的LBPH,将其对应的类别作为识别的类别输出。
用LBPH进行训练和识别的代码。
#include<iostream>
#include<opencv2\core\core.hpp>
#include<opencv2\highgui\highgui.hpp>
#include<opencv2\imgproc\imgproc.hpp>
#include<opencv2\contrib\contrib.hpp>
using namespace std;
using namespace cv;
int main(int argc,char* argv[])
{
vector<Mat> images;
vector<int> labels;
char buff[10];
for(int i=1;i<8;i++)
{
sprintf(buff,"0%d.tif",i);
Mat image = imread(buff);
Mat grayImage;
cvtColor(image,grayImage,COLOR_BGR2GRAY);
images.push_back(grayImage);
labels.push_back(1);
}
for(int i=8;i<12;i++)
{
sprintf(buff,"0%d.tif",i);
Mat image = imread(buff);
Mat grayImage;
cvtColor(image,grayImage,COLOR_BGR2GRAY);
images.push_back(grayImage);
labels.push_back(2);
}
Ptr<FaceRecognizer> p = createLBPHFaceRecognizer();
p->train(images,labels);
Mat test= imread("12.tif");
Mat grayImage;
cvtColor(test,grayImage,COLOR_BGR2GRAY);
int result = p->predict(grayImage);
cout<<result<<endl;
system("pause");
return 0;
}- 1
- 2
- 3
- 4
- 5
- 6
- 7
- 8
- 9
- 10
- 11
- 12
- 13
- 14
- 15
- 16
- 17
- 18
- 19
- 20
- 21
- 22
- 23
- 24
- 25
- 26
- 27
- 28
- 29
- 30
- 31
- 32
- 33
- 34
- 35
- 36
- 37
- 38
- 39
- 40
- 41
- 42
测试结果:

参考资料
[1] T. Ojala, M. Pietikäinen, and D. Harwood (1994), “Performance evaluation of texture measures with classification based on Kullback discrimination of distributions”, Proceedings of the 12th IAPR International Conference on Pattern Recognition (ICPR 1994), vol. 1, pp. 582 - 585.
[2] T. Ojala, M. Pietikäinen, and D. Harwood (1996), “A Comparative Study of Texture Measures with Classification Based on Feature Distributions”, Pattern Recognition, vol. 29, pp. 51-59.
[3] Ahonen, T., Hadid, A., and Pietikainen, M. Face Recognition with Local Binary Patterns. Computer Vision- ECCV 2004 (2004), 469–481.
[4] http://blog.csdn.net/xidianzhimeng/article/details/19634573
[5] opencv参考手册,Opencv源码
[6] http://blog.csdn.net/zouxy09/article/details/7929531
[7] http://blog.csdn.net/songzitea/article/details/17686135
[8] http://stackoverflow.com/questions/20085833/face-detection-algorithms-with-minimal-training-time/20086402#20086402
[9] Shengcai Liao, Xiangxin Zhu, Zhen Lei, Lun Zhang and Stan Z. Li. Learning Multi-scale Block Local Binary Patterns for Face Recognition. International Conference on Biometrics (ICB), 2007, pp. 828-837.
[10] Ahonen T, Hadid A. and Pietikäinen M. “Face description with local binary patterns: Application to face recognition.” IEEE Transactions on Pattern Analysis and Machine Intelligence, 28(12):2037-2041.