源码下载地址点击打开链接
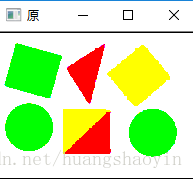
原始图片:
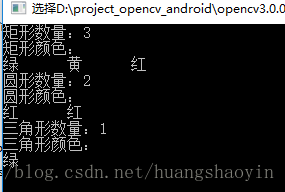
检测结果:
检测后图片:

下面为完整代码:
#include <iostream>#include "opencv2/opencv.hpp"
#include <opencv2/core/core.hpp>
#include <opencv2/highgui/highgui.hpp>
#include <opencv/cv.h>
#include <opencv/highgui.h>
using namespace cv;
using namespace std;
double angle(Point pt1, Point pt2, Point pt0)
{
double dx1 = pt1.x - pt0.x;
double dy1 = pt1.y - pt0.y;
double dx2 = pt2.x - pt0.x;
double dy2 = pt2.y - pt0.y;
double cosine = (dx1*dx2 + dy1*dy2) / (sqrt(dx1*dx1 + dy1*dy1) * sqrt(dx2*dx2 + dy2*dy2) + 1e-10);
}
enum string{ 红, 橙, 黄, 绿, 青, 蓝, 紫, 黑, 白, 其他 }colors;
if (contour.size() == 0)
return ;
int totalx = 0;
int totaly = 0;
int n = 0;
for (size_t i = 0; i < contour.size(); i++){
n++;
totalx = totalx + contour[i].x;
totaly = totaly + contour[i].y;
}
(*p).x = totalx / n;
(*p).y = totaly / n;
}
int detect_color(Point p, Mat & src, Mat & rgb)
{
int res=-1;
int h=src.at<Vec3b>(p.y, p.x)[0];
int s = src.at<Vec3b>(p.y, p.x)[1];
int v = src.at<Vec3b>(p.y, p.x)[2];
if (h >=0 && h <= 10 && s > 43 && v > 46 ){
res = 0;
}
else if (h >= 156 && h <= 180 && s > 43 && v > 46){
res = 0;
}
else if (h >= 11 && h <= 25 && s > 43 && v > 46){
res = 1;
}
else if (h >= 26 && h <= 34 && s > 43 && v > 46){
res = 2;
}
else if (h >= 35 && h <= 77 && s > 43 && v > 46){
res = 3;
}
else if (h >= 78 && h <= 99 && s > 43 && v > 46){
res = 4;
}
else if (h >= 100 && h <= 124 && s > 43 && v > 46){
res = 5;
}
else if (h >= 125 && h <= 155 && s > 43 && v > 46){
res = 6;
}
else
{
int g = rgb.at<Vec3b>(p.y, p.x)[0];
int b = rgb.at<Vec3b>(p.y, p.x)[1];
int r = rgb.at<Vec3b>(p.y, p.x)[2];
if (g <=10 && b <= 10 && r <=10){
res = 7;
}
else if (g >=200 && b>=200 && r>=200){
res = 8;
}
else{
res = 9;
}
}
return res;
}
void shape_rgb(Mat & src, Mat & rgb,CvSeq *first_contour, int *num_squares, vector<int>& squares_color, vector<vector<Point>>& squares, vector<vector<Point>>& circles, int *num_circles, vector<int>& circles_color, vector<vector<Point>>& triangles, int *num_triangles, vector<int>& triangles_color){
vector<Point > contour;
vector<Point > approx;
Point poi = 0;
int nu = -1;
int cnt = 0;
for (; first_contour != 0; first_contour = first_contour->h_next)
{
vector <Point>().swap(contour);
vector <Point>().swap(approx);
cnt++;
for (int i = 0; i<first_contour->total; ++i)
{
Point *p = (Point *)cvGetSeqElem(first_contour, i);
Point pp = *p;
contour.push_back(pp);
}
approxPolyDP(contour, approx, arcLength(contour, true)*0.02, true);
squares.push_back(approx);
if (approx.size() == 4 &&
fabs(contourArea(approx)) >= 1000 &&
isContourConvex(approx))
{
double maxCosine = 0;
for (int j = 2; j < 5; j++)
{
double cosine = fabs(angle(approx[j % 4], approx[j - 2], approx[j - 1]));
maxCosine = MAX(maxCosine, cosine);
}
if (maxCosine <= 0.3) //直角的矩形应该为0
{
squares.push_back(approx);
*num_squares = *num_squares + 1;
nu = -1;
get_point(approx, &poi);
int nu = detect_color(poi, src, rgb);
squares_color.push_back(nu);
}
//re = re + 1;
}
else if (approx.size() == 3 &&fabs(contourArea(approx)) >= 500 &&isContourConvex(approx)){ //tt = tt + 1; //
triangles.push_back(approx);
*num_triangles = *num_triangles + 1;
nu = -1;
get_point(approx, &poi);
int nu = detect_color(poi, src, rgb);
triangles_color.push_back(nu);
}
else if (approx.size() >=8 && fabs(contourArea(approx)) >= 500 && isContourConvex(approx)){ //tt = tt + 1; //
circles.push_back(approx);
*num_circles = *num_circles + 1;
nu = -1;
get_point(approx, &poi);
int nu = detect_color(poi, src, rgb);
circles_color.push_back(nu);
}
}
}
void drawSquares(Mat img, vector<vector<Point>> squares)
{
polylines(img, squares, true, Scalar(0, 0, 0), 1, LINE_AA);
}
{
IplImage *src = cvLoadImage("dect.jpg", 1);
IplImage* dst = cvCreateImage(cvGetSize(src), 8, 3);
IplImage* dst1 = cvCreateImage(cvGetSize(src), 8, 1);
IplImage* color_dst = cvCreateImage(cvGetSize(src), 8, 3);
CvMemStorage* storage = cvCreateMemStorage(0);
CvMemStorage* Rstorage = cvCreateMemStorage(0);
CvMemStorage* Gstorage = cvCreateMemStorage(0);
CvMemStorage* Bstorage = cvCreateMemStorage(0);
CvSeq* lines = 0;
int i;
IplImage* src1 = cvCreateImage(cvSize(src->width, src->height), IPL_DEPTH_8U, 1);
IplImage* RedImage = cvCreateImage(cvGetSize(src), 8, 1);
IplImage* GreenImage = cvCreateImage(cvGetSize(src), 8, 1);
IplImage* BlueImage = cvCreateImage(cvGetSize(src), 8, 1);
IplImage* Rgray = cvCreateImage(cvGetSize(src), 8, 1);
IplImage* Ggray = cvCreateImage(cvGetSize(src), 8, 1);
IplImage* Bgray = cvCreateImage(cvGetSize(src), 8, 1);
cvSplit(src, BlueImage, GreenImage, RedImage, 0);
cvThreshold(BlueImage, Bgray, 100, 255, CV_THRESH_BINARY);
cvThreshold(GreenImage, Ggray, 100, 255, CV_THRESH_BINARY);
cvThreshold(RedImage, Rgray, 100, 255, CV_THRESH_BINARY);
vector<vector<Point>> contours;
CvZero(dst);
CvSeq *first_contour = NULL;
CvSeq *Rfirst_contour = NULL;
CvSeq *Gfirst_contour = NULL;
CvSeq *Bfirst_contour = NULL;
cvFindContours(Rgray, storage, &first_contour, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
for (; first_contour != 0; first_contour = first_contour->h_next)
{
if (first_contour->h_next = 0)
break;
cvDrawContours(dst, first_contour, CV_RGB(255, 255, 255), CV_RGB(255, 255, 255), 2, CV_FILLED, 8, cvPoint(0, 0));
}
cvCvtColor(dst, dst1, CV_BGR2GRAY);
cvFindContours(Rgray, Gstorage, &Gfirst_contour, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
cvFindContours(Ggray, Rstorage, &Rfirst_contour, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
cvFindContours(Bgray, Bstorage, &Bfirst_contour, sizeof(CvContour), CV_RETR_LIST, CV_CHAIN_APPROX_SIMPLE);
cvZero(Rgray);
cvZero(Bgray);
cvZero(Ggray);
cvDrawContours(Rgray, Rfirst_contour, 255, 255, 1, CV_FILLED, 8, cvPoint(0, 0));
cvDrawContours(Ggray, Gfirst_contour, 255, 255, 1, CV_FILLED, 8, cvPoint(0, 0));
cvDrawContours(Bgray, Bfirst_contour, 255,255, 1, CV_FILLED, 8, cvPoint(0, 0));
cvMerge(Bgray, Ggray, Rgray,0,dst);
cvCvtColor(dst, dst1, CV_BGR2GRAY);
cvThreshold(dst1, dst1, 240, 255, CV_THRESH_BINARY_INV);
cvFindContours(dst1, storage, &first_contour, sizeof(CvContour), CV_RETR_EXTERNAL, CV_CHAIN_APPROX_SIMPLE);
int num_squares=0;
vector<int> squares_color;
vector<vector<Point>> squares;
vector<vector<Point>> circles;
int num_circles=0;
vector<int> circles_color;
vector<vector<Point>> triangles;
int num_triangles = 0;
vector<int> triangles_color;
Mat img;
img = cvarrToMat(src);
Mat imgHSV;
cvtColor(img, imgHSV, COLOR_BGR2HSV); //Convert the captured frame from BGR to HSV
shape_rgb(imgHSV, img, first_contour, &num_squares, squares_color, squares, circles, &num_circles, circles_color, triangles, &num_triangles, triangles_color);
vector<int> mycircles_color;
IplImage* gray = cvCreateImage(cvGetSize(src), 8, 1);
CvMemStorage* mystorage = cvCreateMemStorage(0);
cvCvtColor(src, gray, CV_BGR2GRAY);
cvSmooth(gray, gray, CV_GAUSSIAN, 9, 9); // smooth it, otherwise a lot of false circles may be detected
CvSeq* mycircles = cvHoughCircles(gray, mystorage, CV_HOUGH_GRADIENT, 2, gray->height / 4, 200, 100);
Point circl = 0;
for (i = 0; i < mycircles->total; i++)
{
float* p = (float*)cvGetSeqElem(mycircles, i);
cvCircle(src, cvPoint(cvRound(p[0]), cvRound(p[1])), 3, CV_RGB(0, 255, 0), -1, 8, 0);
cvCircle(src, cvPoint(cvRound(p[0]), cvRound(p[1])), cvRound(p[2]), CV_RGB(255, 0, 0), 3, 8, 0);
circl.y = p[1];
circl.x = p[0];
int nu = detect_color(circl, imgHSV, img);
mycircles_color.push_back(nu);
}
drawSquares(img, squares);
printf("矩形数量:");
printf("%d", squares_color.size());
printf("\n");
printf("矩形颜色:");
printf("\n");
for (size_t i = 0; i < squares_color.size(); i++){
switch (squares_color[i])//判断枚举变量day的值
{
case 0:printf("红\t"); break;
case 1:printf("橙\t"); break;
case 2:printf("黄\t"); break;
case 3:printf("绿\t"); break;
case 4:printf("青\t"); break;
case 5:printf("蓝\t"); break;
case 6:printf("紫\t"); break;
case 7:printf("黑\t"); break;
case 8:printf("白\t"); break;
case 9:printf("其他\t"); break;
}
//printf("\n");
}
printf("\n");
printf("圆形数量:");
printf("%d", num_circles);
printf("\n");
printf("圆形颜色:");
printf("\n");
for (size_t i = 0; i < circles_color.size(); i++){
switch (circles_color[i])//判断枚举变量day的值
{
case 0:printf("红\t"); break;
case 1:printf("橙\t"); break;
case 2:printf("黄\t"); break;
case 3:printf("绿\t"); break;
case 4:printf("青\t"); break;
case 5:printf("蓝\t"); break;
case 6:printf("紫\t"); break;
case 7:printf("黑\t"); break;
case 8:printf("白\t"); break;
case 9:printf("其他\t"); break;
}
}
printf("\n");
printf("三角形数量:");
printf("%d", num_triangles);
printf("\n");
printf("三角形颜色:");
printf("\n");
for (size_t i = 0; i < triangles_color.size(); i++){
switch (triangles_color[i])//判断枚举变量day的值
{
case 0:printf("红\t"); break;
case 1:printf("橙\t"); break;
case 2:printf("黄\t"); break;
case 3:printf("绿\t"); break;
case 4:printf("青\t"); break;
case 5:printf("蓝\t"); break;
case 6:printf("紫\t"); break;
case 7:printf("黑\t"); break;
case 8:printf("白\t"); break;
case 9:printf("其他\t"); break;
}
}
printf("\n");
cvNamedWindow("原始图片", 1);
cvShowImage("原始图片", dst);
cvNamedWindow("检测后图片", 1);
cvShowImage("检测后图片", src);
cvWaitKey(0);
cvDestroyWindow("原始图片");
cvDestroyWindow("检测后图片");
}