作用有局限性,必须在指定的环境下,才能匹配成功,是受到很多因素的影响,所以有一定的适应性
模板匹配是一种最原始、最基本的模式识别方法,研究某一特定对象物的图案位于图像的什么地方,进而识别对象物,这就是一个匹配问题。
它是图像处理中最基本、最常用的匹配方法。
模板匹配具有自身的局限性,主要表现在它只能进行平行移动,若原图像中的匹配目标发生旋转或大小变化,该算法无效。
模板匹配就是在整个图像区域发现与给定子图像匹配的小块区域
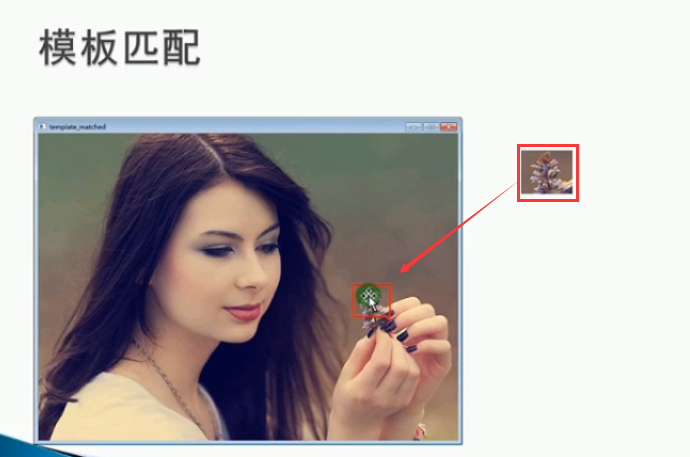
工作原理:在待检测图像上,从左到右,从上向下计算模板图像与重叠子图像的匹配度,匹配程度越大,两者相同的可能性越大。
代码实现:
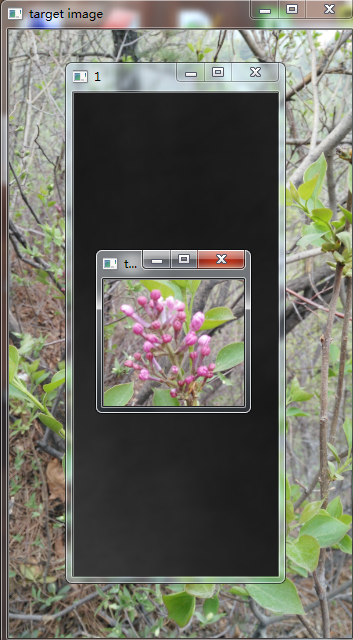
import cv2 as cv import numpy as np def template_demo(): tpl = cv.imread("./temp.png") target = cv.imread("./1.png") cv.imshow("template image",tpl) cv.imshow("target image",target) methods = [cv.TM_SQDIFF_NORMED,cv.TM_CCORR_NORMED,cv.TM_CCOEFF_NORMED] #各种匹配算法 th,tw = tpl.shape[:2] #获取模板图像的高宽 for md in methods: result = cv.matchTemplate(target,tpl,md) # result是我们各种算法下匹配后的图像 # cv.imshow("%s"%md,result) #获取的是每种公式中计算出来的值,每个像素点都对应一个值 min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result) if md == cv.TM_SQDIFF_NORMED: tl = min_loc #tl是左上角点 else: tl = max_loc br = (tl[0]+tw,tl[1]+th) #右下点 cv.rectangle(target,tl,br,(0,0,255),2) #画矩形 cv.imshow("match-%s"%md,target) src = cv.imread("./1.png") #读取图片 cv.namedWindow("input image",cv.WINDOW_AUTOSIZE) #创建GUI窗口,形式为自适应 cv.imshow("input image",src) #通过名字将图像和窗口联系 template_demo() cv.waitKey(0) #等待用户操作,里面等待参数是毫秒,我们填写0,代表是永远,等待用户操作 cv.destroyAllWindows() #销毁所有窗口
补充:
1.几种常见的模板匹配算法
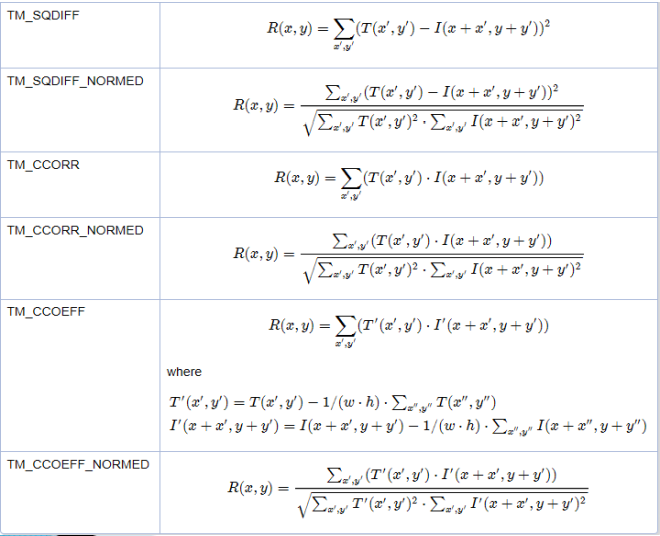
①TM_SQDIFF是平方差匹配;TM_SQDIFF_NORMED是标准平方差匹配。利用平方差来进行匹配,最好匹配为0.匹配越差,匹配值越大。 ②TM_CCORR是相关性匹配;TM_CCORR_NORMED是标准相关性匹配。采用模板和图像间的乘法操作,数越大表示匹配程度较高, 0表示最坏的匹配效果。 ③TM_CCOEFF是相关性系数匹配;TM_CCOEFF_NORMED是标准相关性系数匹配。将模版对其均值的相对值与图像对其均值的相关值进行匹配,1表示完美匹配,-1表示糟糕的匹配,0表示没有任何相关性(随机序列)。 总结:随着从简单的测量(平方差)到更复杂的测量(相关系数),我们可获得越来越准确的匹配(同时也意味着越来越大的计算代价)。
相关性是越接近1越大越好
平方差是越小越好
所以TM_SQDIFF在使用时和其他的是有所区别的
2.result = cv.matchTemplate(target,tpl,md)
opencv的目标匹配函数为matchTemplate,函数原型为:matchTemplate(image, templ, method[, result[, mask]]) -> result image参数表示待搜索源图像,必须是8位整数或32位浮点。 templ参数表示模板图像,必须不大于源图像并具有相同的数据类型。 method参数表示计算匹配程度的方法。 result参数表示匹配结果图像,必须是单通道32位浮点。如果image的尺寸为W x H,templ的尺寸为w x h,则result的尺寸为(W-w+1)x(H-h+1)。
其中result是模板图像去匹配的区域位置图像

3.min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result)
opencv的函数minMaxLoc:在给定的矩阵中寻找最大和最小值,并给出它们的位置。 该功能不适用于多通道阵列。 如果您需要在所有通道中查找最小或最大元素,要先将阵列重新解释为单通道。 函数minMaxLoc原型为:minMaxLoc(src[, mask]) -> minVal, maxVal, minLoc, maxLoc src参数表示输入单通道图像。 mask参数表示用于选择子数组的可选掩码。 minVal参数表示返回的最小值,如果不需要,则使用NULL。 maxVal参数表示返回的最大值,如果不需要,则使用NULL。 minLoc参数表示返回的最小位置的指针(在2D情况下); 如果不需要,则使用NULL。 maxLoc参数表示返回的最大位置的指针(在2D情况下); 如果不需要,则使用NULL。
结合每种匹配算法,我们看看获取的数值
result = cv.matchTemplate(target,tpl,md) #获取的是每种公式中计算出来的值,每个像素点都对应一个值 min_val,max_val,min_loc,max_loc = cv.minMaxLoc(result) print("--------------%s--------------"%md) print("min_val",min_val) print("max_val",max_val) print("min_loc",min_loc) print("max_loc",max_loc) print("--------------%s--------------" % md)
--------------1-------------- #TM_SQDIFF_NORMED标准平方差匹配 min_val 0.0 #标准差是越小为0代表匹配上了 max_val 0.22279763221740723 min_loc (108, 248) max_loc (3, 480) --------------1-------------- --------------3-------------- #TM_CCORR_NORMED标准相关性匹配 min_val 0.9228140115737915 max_val 1.0 #相关性是越接近1代表匹配上了 min_loc (9, 378) max_loc (108, 248) --------------3-------------- --------------5-------------- #TM_CCOEFF_NORMED标准相关性系数匹配 min_val -0.10706906020641327 max_val 1.0 #相关性越接近1越好 min_loc (186, 248) max_loc (108, 248) --------------5--------------
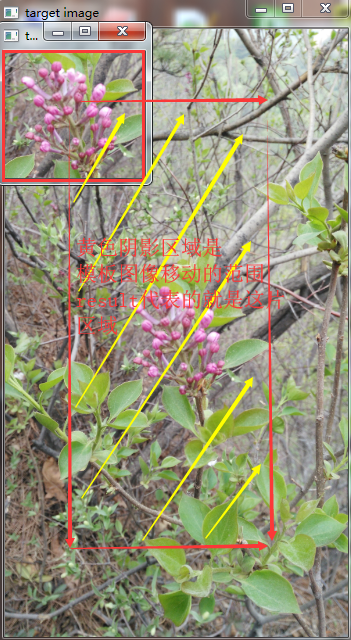
查看min_loc和max_loc关系
cv.line(target,min_loc,max_loc,(0,255,255),2)
