目录
致谢:ROS赵虚左老师
Introduction · Autolabor-ROS机器人入门课程《ROS理论与实践》零基础教程
参考赵虚左老师的实战教程

一、节点rosnode
rosnode :
rosnode list # 查看所有节点名称
rosnode ping / <节点> # 能否链接节点
rosnode info / <节点> # 查看某个节点的信息
rosnode machine <机器> # 查看指定机器的节点信息
rosnode kill / <节点> # 结束节点
rosnode cleanup # master不知道节点已经结束,清除将僵尸节点二、话题rostopic
rostopic :
rostopic list # 获取活跃节点发布的话题
rostopic echo <话题> # 获取话题发布的信息
rostopic pub <话题> <消息类型> # 指令扮演发布者 消息类型使用Tab键补齐(用于测试)
rostopic pub -r <一秒速率> <话题> <消息类型> # 指令扮演发布者 Tab键补齐
rostopic info <话题> # 查看话题信息
rostopic hz <话题> # 查看话题发布频率三、服务rosservice
rosservice :
rosservice list # 查看服务端提供的服务
rosservice call <客户> # 假扮客户端
rosservice info <服务话题> # 查看服务话题的信息
rosservice type <服务话题> # 打印服务类型四、消息类型rosmsg
rosmsg :
rosmsg list # 列出所有消息类型
rosmsg list | grep -i <消息类型> # 查找某个消息类型
rosmsg show <消息名称> # 显示某个消息类型具体信息
rosmsg info <消息名称> # 显示某个消息类型具体信息(类似show)
rosmsg md5 <消息名称> # 显示md5加密后的消息
rosmsg package <功能包> # 显示某个功能包下所有的信息
rosmsg packages # 列出包含消息的功能包五、服务类型rossrv
rossrv :
rossrv list # 查看所有的服务类型
rossrv list | grep -i addInts # 查看指定的服务类型
rossrv info <服务类型> # 显示具体的服务类型 补充:查看消息载体,需要进入操作工作空间,并且配置环境变量
六、参数rosparam
rosparam :
rosparam list # 列出所有参数
rosparam set <参数> <值> # 设置参数
rosparam get # 获取参数
rosparam delete <参数> # 删除参数保存参数dump:
rosparam dump <文件名字>.yaml # 将参数保存在yaml文件里面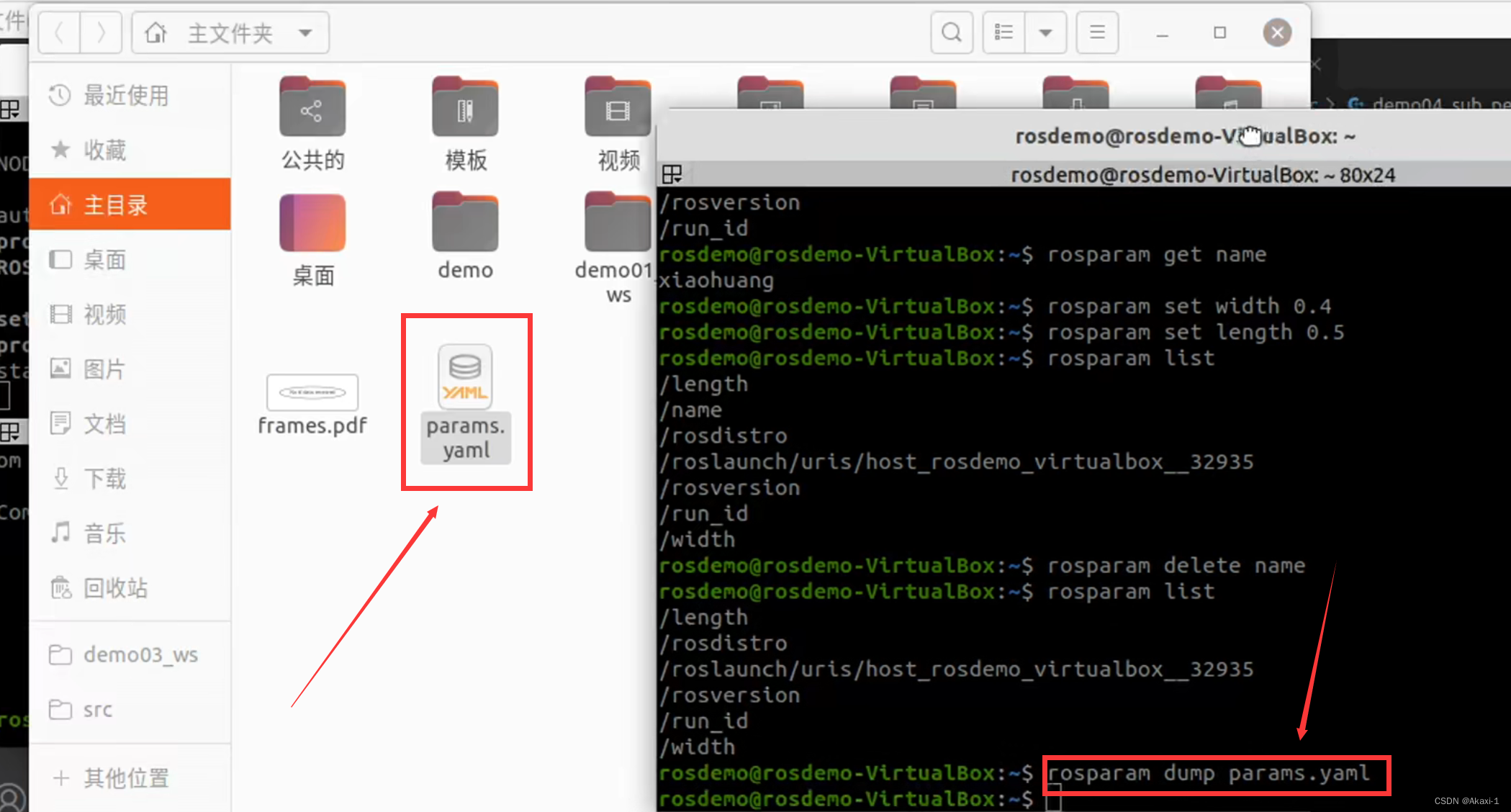
加载参数load:
rosparam load <文件名称>.yaml # 加载yaml参数文件
七、数据rosbag
rosbag record /<话题名> -o <命名bag包> # 采集记录话题的数据并生成bag包
rosbag play <bag包名字> # 重演bag包用rviz可视化
Fixed Frame -- lisdir 将坐标改成lisdir
Topic -- 还需要改变一下话题
2023.11.9
渝北仙桃数据谷