目录
一、永磁同步电机基本结构
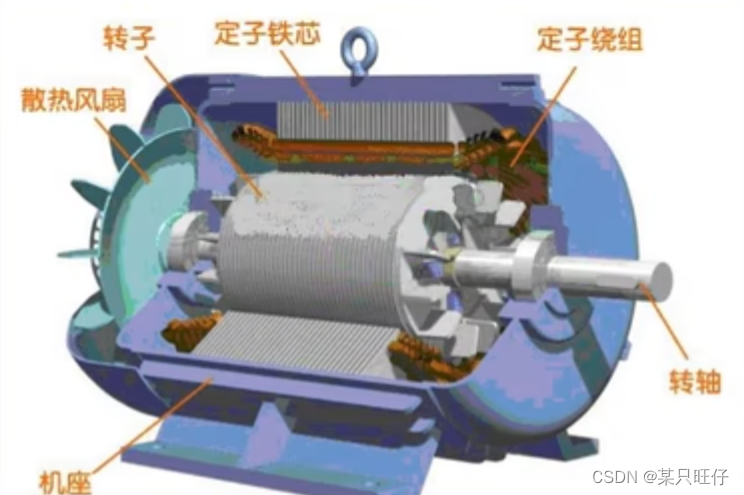


其中第一张图为永磁同步电机的剖视图,第二张为定子结构图,第三张为转子结构图,其中转子由永磁体构成。

在定子中通入三相交流电,每一相均在周围形成磁场,将a,b,c三相构成的磁场进行矢量合成,理论上可以得到圆形旋转磁场,我们可以将其想象成一个具有NS极的磁铁在转动。由于转子由永磁体构成,我们也可以将其看成具有NS极的磁铁。于是由于同性相斥,异性相吸,旋转磁铁转动吸引着转子也进行旋转,从而使得电能转化为机械能,实现了电动机的基本功能。
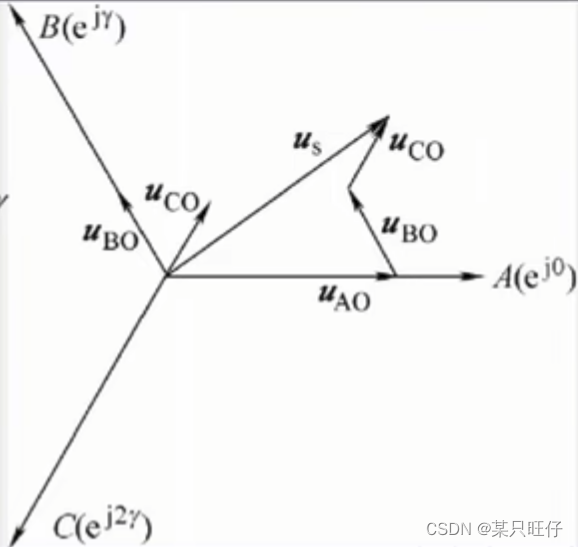
我们将三相的相电压画在图中,形象的来看一下。其中A(),
分别为a,b,c相的基准轴,也就是说每一相对应的相电压矢量原点与基准轴原点重合,方向与其相同(值为正)或相反(值为负)。之后,我们将三个相电压进行矢量合成,可以得到合成电压
。
其中表示的是定子电压(可以使用合成电压进行等效),
分别指的是定子电阻值和电流值,
指的是定子磁通,求导后能得到感应电动势。由于旋转磁通产生的感应电动势远远大于定子电阻上的电压值,于是我们将定子电阻电压忽略。我们将旋转磁通写成幅值加相角的形式
,并关于时间求导,得到最终结果
,可以看出定子电压是超前于磁通90°,幅值不变的向量,如下面的左图所示。
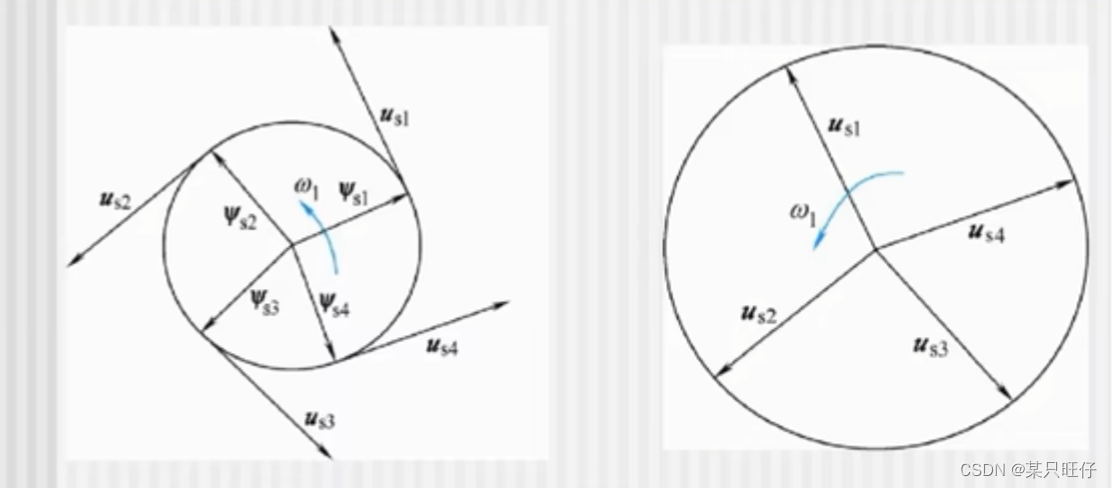
我们将左图中的电压矢量的原点放在一起,于是构成幅值相等,角度不同的多个电压矢量图,随着转动,他们共同构成了圆形旋转电压矢量。
二、坐标变换(为后续SVPWM的内容做准备)
转载:FOC坐标变换
引入不同的坐标系,对交流电动机的数学模型进行化简,将某些物理量在不同的坐标系之间进行变换,即坐标变换。变换遵守的原则是:不同坐标系上的绕组产生的总磁动势不变。
在电机矢量控制中,主要有三相定子坐标系abc,等效的两相正交定子坐标系αβ,都是静止坐标系;还有就是两相正交转子坐标系dq,是旋转坐标系。
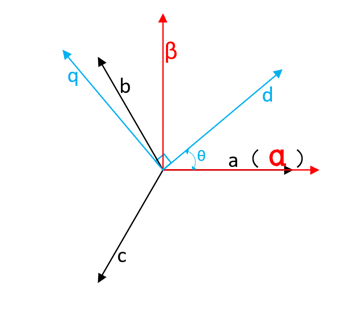
1. abc三相静止坐标系(3s坐标系):
如图所示,由电机的三相绕组组成三个坐标轴,坐标轴两两相差120°,这里取a轴水平向右。

2. αβ两相静止坐标系(2s坐标系):
如图所示,α轴和abc坐标系中的a轴重合,β轴超前α轴90°,α轴和β轴正交。

3. dq两相旋转坐标系(2r坐标系):
如图所示,dq坐标系为转子坐标系,随着转子的转动,坐标系绕转轴转动,在转动过程中,d轴和q轴始终垂直,q轴超前d轴90°,记逆时针旋转为正方向,旋转的d轴与静止的α轴之间的夹角称为机械角度θ。
4. Clarke变换:
由三相静止坐标系abc到两相静止坐标系αβ的变换成为Clarke变换,一般指电流变换,即ia,ib,ic变换为iα,iβ。设三相abc坐标系中每相绕组匝数为N3,等效两相αβ坐标系中每相绕组匝数为N2。

在2s坐标系中,描述由3s坐标系绕组产生的总磁动势为:
![]()
在2s坐标系中,描述由2s坐标系绕组产生的总磁动势为:
![]()
由于在不同坐标系绕组产生的总磁动势相等,即
![]()
可以得到:

![]()
通常取匝数比 N3/N2=2/3,这样可以推出三相电流ia,ib,ic和两相电流iα,iβ的幅值是相等的(也可以取其他的匝数比,得到其他的变换系数,这里只是方便计算)。即三相坐标系绕组产生的磁动势在α和β轴的分量与α和β轴本身产生的磁动势相等。即:
即有Clarke变换矩阵:

在永磁同步电机模型中,有三相电流的矢量和为零,即
![]()
故在程序中计算时,为减小计算复杂度,有:

在实际的算法应用中,由测量得到实际的三相电流ia,ib,ic。通过Clarke变换得到等效的电流iα,iβ。
5. Clarke逆变换(IClarke):
由两相静止坐标系αβ到三相静止坐标系abc的变换成为Clarke逆变换,一般是指电压变换。由Clarke变换的推到关系式易得:
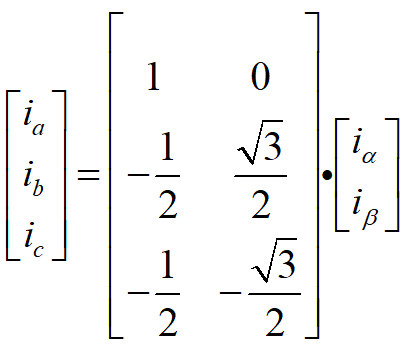
在实际应用中一般为电压变换,所以常用变换矩阵为:

由等效的期望输出电压Uα和Uβ,通过Clarke逆变换,计算得到实际的三相输出电压Ua,Ub,Uc,最后通过SVPWM计算三相电压的作用时间计算H桥开关管的通断顺序和占空比。
6. Park变换:
由两相静止坐标系αβ到两相旋转坐标系dq的变换成为park变换,一般指电流变换,即iα,iβ变换为id,iq。变换遵守的原则同样是,不同坐标系上的绕组产生的总磁动势不变。
等效两相αβ坐标系中每相绕组匝数为N2,dq两相坐标系中每相绕组匝数也为N2(dq坐标系相当于是由αβ坐标系旋转一个θ角度来的)。

在2r坐标系中建立关系式,即把αβ轴的磁动势分解到dq轴。
在2r坐标系中,描述由2s坐标系绕组产生的总磁动势为:
![]()
在2r坐标系中,描述由2r坐标系绕组产生的总磁动势为:
![]()
由于在不同坐标系绕组产生的总磁动势相等,即
![]()
可得
![]()
即αβ坐标系绕组产生的磁动势在d和q轴的分量与d和q轴本身产生的磁动势相等。即有:

即有park变换矩阵:

由上一步计算得到的电流iα,iβ,和测量得到的机械角θ(机械角θ也可以由观测器估算得到),通过park变换得到等效的旋转坐标系中的电流iq,id。
速度环根据当前速度和期望速度,输出一个期望电流iq*;q轴电流环根据当前电流iq和期望电流iq*,计算输出一个期望电压Uq;d轴电流环根据当前电流id和期望电流id*(id*一般给定为0)输出一个期望电压Ud,然后进行逆变换计算输出电压。
7. Park逆变换(IPark):
由两相旋转坐标系dq到两相静止坐标系αβ的变换成为park逆变换,一般指电压变换

在2s坐标系中建立关系式,即把dq轴的磁动势分解到αβ轴。
在2s坐标系中,描述由2s坐标系绕组产生的总磁动势为:
![]()
在2s坐标系中,描述由2r坐标系绕组产生的总磁动势为:
![]()
由于在不同坐标系绕组产生的总磁动势相等,即
![]()
可得:
![]()
即dq坐标系绕组产生的磁动势在α和β轴的分量与α和β轴本身产生的磁动势相等。即有:
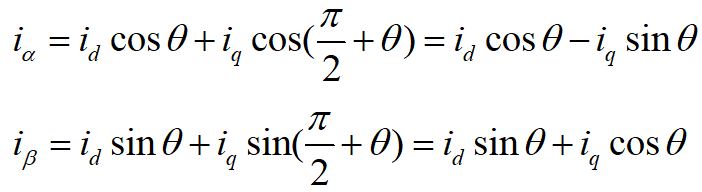
即有park逆变换矩阵

在FOC应用中一般是电压变换,故常用

由PI闭环控制器(一般为一个速度环和两个电流环)计算输出的Ud,Uq,通过park逆变换,得到等效的期望输出电压Uα和Uβ。
后续还会写关于SVPWM算法的理论知识....