1. 背景
球机本身带有一些跟踪算法,比如:人员跟踪、车辆跟踪,比较有限。如果要实现飞机跟踪,那么就只能自己实现了。今天咱们就一起来说一说,如何使用球机实现飞机跟踪。
2. 实现步骤
2.1 飞机识别
通过yolo实现飞机识别
2.2 计算目标与球机中心的偏离角度
2.2.1 获取球机视场角
以海康球机iDS-2VS435-F837为例:
计算公式为:
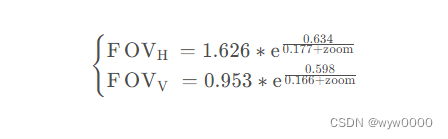
公式来源参见:《球机的PTZ和视场角与ONVIF的PTZ对应关系》
有的球机会提供获取视场角的api,比如华为球机
2.2.2 计算偏离角度
计算公式:
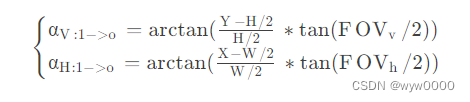
公式来源参见:《球机3D定位解析及ONVIF实现》
2.3 计算角速度
角速度=偏离角度/时间
2.4 将角速度映射到球机转速挡位
无论是海康球机还是华为球机都提供了64个挡位的微调,但是每个挡位对应的转速并没有提供,对于这些大公司想要问到这么细的技术问题还是比较难的,反正我是没问到,只能自己一个档一个档的测试。
问题:目前飞机起飞过程还追不上,正在优化,之后补上。有大神能提供思路,将万分感谢!