目录
(5) 运行APP闪退:dlopen failed: library "libomp.so" not found
1. 前言
目前在AI智慧教育领域,有一个比较火热的教育产品,即指尖点读或者笔尖点读功能,其核心算法就是通过深度学习的方法获得笔尖或者指尖的位置,在通过OCR识别文本,最后通过TTS(TextToSpeech)将文本转为语音;其中OCR和TTS算法都已经研究非常成熟了,而指尖或者笔尖检测的方法也有一些开源的项目可以参考实现。本项目将实现笔尖笔帽关键点检测算法,其中使用YOLOv5模型实现手部检测(手握着笔目标检测),使用HRNet,LiteHRNet和Mobilenet-v2模型实现笔尖笔帽关键点检测。项目分为数据标注,模型训练和Android部署等多个章节,本篇是项目《笔尖笔帽检测》系列文章之Android实现笔尖笔帽检测算法;为了方便后续模型工程化和Android平台部署,项目支持高精度HRNet检测模型,轻量化模型LiteHRNet和Mobilenet模型训练和测试,并提供Python/C++/Android多个版本;
轻量化Mobilenet-v2模型在普通Android手机上可以达到实时的检测效果,CPU(4线程)约50ms左右,GPU约30ms左右 ,基本满足业务的性能需求。下表格给出HRNet,以及轻量化模型LiteHRNet和Mobilenet的计算量和参数量,以及其检测精度。
| 模型 | input-size | params(M) | GFLOPs | AP |
| HRNet-w32 | 192×192 | 28.48M | 5734.05M | 0.8418 |
| LiteHRNet18 | 192×192 | 1.10M | 182.15M | 0.7469 |
| Mobilenet-v2 | 192×192 | 2.63M | 529.25M | 0.7531 |
【尊重原创,转载请注明出处】https://blog.csdn.net/guyuealian/article/details/134070497
Android笔尖笔帽关键点检测APP Demo体验(下载):
https://download.csdn.net/download/guyuealian/88535143
更多项目《笔尖笔帽检测》系列文章请参考:
- 笔尖笔帽检测1:笔尖笔帽检测数据集(含下载链接)https://blog.csdn.net/guyuealian/article/details/134070255
- 笔尖笔帽检测2:Pytorch实现笔尖笔帽检测算法(含训练代码和数据集)https://blog.csdn.net/guyuealian/article/details/134070483
- 笔尖笔帽检测3:Android实现笔尖笔帽检测算法(含源码 可是实时检测)https://blog.csdn.net/guyuealian/article/details/134070497
- 笔尖笔帽检测4:C++实现笔尖笔帽检测算法(含源码 可是实时检测)https://blog.csdn.net/guyuealian/article/details/134070516
2.笔尖笔帽检测方法
笔尖笔帽目标较小,如果直接使用目标检测,很难达到像素级别的检测精度;一般建议使用类似于人体关键点检测的方案。目前主流的关键点方法主要两种:一种是Top-Down(自上而下)方法,另外一种是Bottom-Up(自下而上)方法;
(1)Top-Down(自上而下)方法
将手部检测(手握笔的情况)和笔尖笔帽关键点检测分离,在图像上首先进行手部目标检测,定位手部位置;然后crop每一个手部图像,再估计笔尖笔帽关键点;这类方法往往比较慢,但姿态估计准确度较高。目前主流模型主要有CPN,Hourglass,CPM,Alpha Pose,HRNet等。
(2)Bottom-Up(自下而上)方法:
先估计图像中所有笔尖笔帽关键点,然后在通过Grouping的方法组合成一个一个实例;因此这类方法在测试推断的时候往往更快速,准确度稍低。典型就是COCO2016年人体关键点检测冠军Open Pose。
通常来说,Top-Down具有更高的精度,而Bottom-Up具有更快的速度;就目前调研而言, Top-Down的方法研究较多,精度也比Bottom-Up(自下而上)方法高。
本项目采用Top-Down(自上而下)方法,使用YOLOv5模型实现手部检测(手握笔检测),使用HRNet进行笔尖笔帽关键点检测;也可以简单理解为,先使用YOLOv5定位手握笔的区域位置,再使用HRNet进行笔尖笔帽精细化位置定位。
本项目基于开源的HRNet进行改进,关于HRNet项目请参考GitHub
HRNet: https://github.com/leoxiaobin/deep-high-resolution-net.pytorch
3.笔尖笔帽关键点检测模型训练
本项目采用Top-Down(自上而下)方法,使用YOLOv5模型实现手部检测(手笔检测),并基于开源的HRNet进行改进实现笔尖笔帽关键点检测;为了方便后续模型工程化和Android平台部署,项目支持轻量化模型LiteHRNet和Mobilenet模型训练和测试,并提供Python/C++/Android多个版本;轻量化Mobilenet-v2模型在普通Android手机上可以达到实时的检测效果,CPU(4线程)约50ms左右,GPU约30ms左右 ,基本满足业务的性能需求
本篇博文主要分享C++版本的模型部署,不包含Python版本的训练代码和相关数据集,关于笔尖笔帽关键点检测的训练方法和数据集说明,可参考 :
下表格给出HRNet,以及轻量化模型LiteHRNet和Mobilenet的计算量和参数量,以及其检测精度AP; 高精度检测模型HRNet-w32,AP可以达到0.8418,但其参数量和计算量比较大,不合适在移动端部署;LiteHRNet18和Mobilenet-v2参数量和计算量比较少,合适在移动端部署;虽然LiteHRNet18的理论计算量和参数量比Mobilenet-v2低,但在实际测试中,发现Mobilenet-v2运行速度更快。轻量化Mobilenet-v2模型在普通Android手机上可以达到实时的检测效果,CPU(4线程)约50ms左右,GPU约30ms左右 ,基本满足业务的性能需求
| 模型 | input-size | params(M) | GFLOPs | AP |
| HRNet-w32 | 192×192 | 28.48M | 5734.05M | 0.8418 |
| LiteHRNet18 | 192×192 | 1.10M | 182.15M | 0.7469 |
| Mobilenet-v2 | 192×192 | 2.63M | 529.25M | 0.7531 |
HRNet-w32参数量和计算量太大,不适合在Android手机部署,本项目Android版本只支持部署LiteHRNet和Mobilenet-v2模型;C++版本可支持部署HRNet-w32,LiteHRNet和Mobilenet-v2模型
4.笔尖笔帽关键点检测模型Android部署
目前CNN模型有多种部署方式,可以采用TNN,MNN,NCNN,以及TensorRT等部署工具,鄙人采用TNN进行Android端上部署。部署流程可分为四步:训练模型->将模型转换ONNX模型->将ONNX模型转换为TNN模型->Android端上部署TNN模型。
(1) 将Pytorch模型转换ONNX模型
训练好Pytorch模型后,我们需要先将模型转换为ONNX模型,以便后续模型部署。
- 原始Python项目提供转换脚本,你只需要修改model_file和config_file为你模型路径即可
- convert_torch_to_onnx.py实现将Pytorch模型转换ONNX模型的脚本
python libs/convert_tools/convert_torch_to_onnx.py"""
This code is used to convert the pytorch model into an onnx format model.
"""
import os
import torch.onnx
from pose.inference import PoseEstimation
from basetrainer.utils.converter import pytorch2onnx
def load_model(config_file, model_file, device="cuda:0"):
pose = PoseEstimation(config_file, model_file, device=device)
model = pose.model
config = pose.config
return model, config
def convert2onnx(config_file, model_file, device="cuda:0", onnx_type="kp"):
"""
:param model_file:
:param input_size:
:param device:
:param onnx_type:
:return:
"""
model, config = load_model(config_file, model_file, device=device)
model = model.to(device)
model.eval()
model_name = os.path.basename(model_file)[:-len(".pth")]
onnx_file = os.path.join(os.path.dirname(model_file), model_name + ".onnx")
# dummy_input = torch.randn(1, 3, 240, 320).to("cuda")
input_size = tuple(config.MODEL.IMAGE_SIZE) # w,h
input_shape = (1, 3, input_size[1], input_size[0])
pytorch2onnx.convert2onnx(model,
input_shape=input_shape,
input_names=['input'],
output_names=['output'],
onnx_file=onnx_file,
opset_version=11)
if __name__ == "__main__":
config_file = "../../work_space/pen/mobilenet_v2_2_192_192_custom_coco_20231114_000651_3262/mobilenetv2_192_192.yaml"
model_file = "../../work_space/pen/mobilenet_v2_2_192_192_custom_coco_20231114_000651_3262/model/model_199_0.7518.pth"
convert2onnx(config_file, model_file)
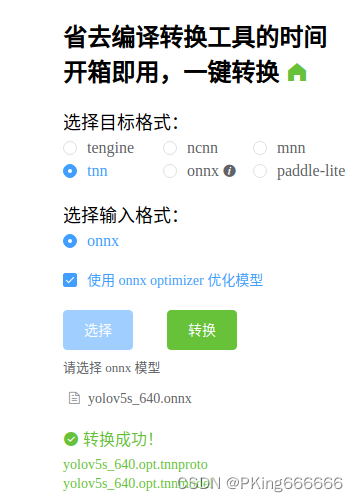
(2) 将ONNX模型转换为TNN模型
目前CNN模型有多种部署方式,可以采用TNN,MNN,NCNN,以及TensorRT等部署工具,鄙人采用TNN进行Android端上部署
TNN转换工具:
- (1)将ONNX模型转换为TNN模型,请参考TNN官方说明:TNN/onnx2tnn.md at master · Tencent/TNN · GitHub
- (2)一键转换,懒人必备:一键转换 Caffe, ONNX, TensorFlow 到 NCNN, MNN, Tengine (可能存在版本问题,这个工具转换的TNN模型可能不兼容,建议还是自己build源码进行转换,2022年9约25日测试可用)
(3) Android端上部署模型
项目实现了Android版本的手部检测(手握着笔)和笔尖笔帽关键点检测Demo,部署框架采用TNN,支持多线程CPU和GPU加速推理,在普通手机上可以实时处理。项目Android源码,核心算法均采用C++实现,上层通过JNI接口调用。
如果你想在这个Android Demo部署你自己训练的分类模型,你可将训练好的Pytorch模型转换ONNX ,再转换成TNN模型,然后把TNN模型代替你模型即可。
HRNet-w32参数量和计算量太大,不适合在Android手机部署,本项目Android版本只支持部署LiteHRNet和Mobilenet-v2模型;C++版本可支持部署HRNet-w32,LiteHRNet和Mobilenet-v2模型
- 这是项目Android源码JNI接口 ,Java部分
package com.cv.tnn.model;
import android.graphics.Bitmap;
public class Detector {
static {
System.loadLibrary("tnn_wrapper");
}
/***
* 初始化检测模型
* @param dets_model: 检测模型(不含后缀名)
* @param pose_model: 识别模型(不含后缀名)
* @param root:模型文件的根目录,放在assets文件夹下
* @param model_type:模型类型
* @param num_thread:开启线程数
* @param useGPU:是否开启GPU进行加速
*/
public static native void init(String dets_model, String pose_model, String root, int model_type, int num_thread, boolean useGPU);
/***
* 返回检测和识别结果
* @param bitmap 图像(bitmap),ARGB_8888格式
* @param score_thresh:置信度阈值
* @param iou_thresh: IOU阈值
* @param pose_thresh: 关键点阈值
* @return
*/
public static native FrameInfo[] detect(Bitmap bitmap, float score_thresh, float iou_thresh, float pose_thresh);
}
- 这是Android项目源码JNI接口 ,C++部分
#include <jni.h>
#include <string>
#include <fstream>
#include "src/yolov5.h"
#include "src/pose_detector.h"
#include "src/Types.h"
#include "debug.h"
#include "android_utils.h"
#include "opencv2/opencv.hpp"
#include "file_utils.h"
using namespace dl;
using namespace vision;
static YOLOv5 *detector = nullptr;
static PoseDetector *pose = nullptr;
JNIEXPORT jint JNI_OnLoad(JavaVM *vm, void *reserved) {
return JNI_VERSION_1_6;
}
JNIEXPORT void JNI_OnUnload(JavaVM *vm, void *reserved) {
}
extern "C"
JNIEXPORT void JNICALL
Java_com_cv_tnn_model_Detector_init(JNIEnv *env,
jclass clazz,
jstring dets_model,
jstring pose_model,
jstring root,
jint model_type,
jint num_thread,
jboolean use_gpu) {
if (detector != nullptr) {
delete detector;
detector = nullptr;
}
std::string parent = env->GetStringUTFChars(root, 0);
std::string dets_model_ = env->GetStringUTFChars(dets_model, 0);
std::string pose_model_ = env->GetStringUTFChars(pose_model, 0);
string dets_model_file = path_joint(parent, dets_model_ + ".tnnmodel");
string dets_proto_file = path_joint(parent, dets_model_ + ".tnnproto");
string pose_model_file = path_joint(parent, pose_model_ + ".tnnmodel");
string pose_proto_file = path_joint(parent, pose_model_ + ".tnnproto");
DeviceType device = use_gpu ? GPU : CPU;
LOGW("parent : %s", parent.c_str());
LOGW("useGPU : %d", use_gpu);
LOGW("device_type: %d", device);
LOGW("model_type : %d", model_type);
LOGW("num_thread : %d", num_thread);
YOLOv5Param model_param = YOLOv5s05_320;//模型参数
detector = new YOLOv5(dets_model_file,
dets_proto_file,
model_param,
num_thread,
device);
PoseParam pose_param = POSE_MODEL_TYPE[model_type];//模型类型
pose = new PoseDetector(pose_model_file,
pose_proto_file,
pose_param,
num_thread,
device);
}
extern "C"
JNIEXPORT jobjectArray JNICALL
Java_com_cv_tnn_model_Detector_detect(JNIEnv *env, jclass clazz, jobject bitmap,
jfloat score_thresh, jfloat iou_thresh, jfloat pose_thresh) {
cv::Mat bgr;
BitmapToMatrix(env, bitmap, bgr);
int src_h = bgr.rows;
int src_w = bgr.cols;
// 检测区域为整张图片的大小
FrameInfo resultInfo;
// 开始检测
if (detector != nullptr) {
detector->detect(bgr, &resultInfo, score_thresh, iou_thresh);
} else {
ObjectInfo objectInfo;
objectInfo.x1 = 0;
objectInfo.y1 = 0;
objectInfo.x2 = (float) src_w;
objectInfo.y2 = (float) src_h;
objectInfo.label = 0;
resultInfo.info.push_back(objectInfo);
}
int nums = resultInfo.info.size();
LOGW("object nums: %d\n", nums);
if (nums > 0) {
// 开始检测
pose->detect(bgr, &resultInfo, pose_thresh);
// 可视化代码
//classifier->visualizeResult(bgr, &resultInfo);
}
//cv::cvtColor(bgr, bgr, cv::COLOR_BGR2RGB);
//MatrixToBitmap(env, bgr, dst_bitmap);
auto BoxInfo = env->FindClass("com/cv/tnn/model/FrameInfo");
auto init_id = env->GetMethodID(BoxInfo, "<init>", "()V");
auto box_id = env->GetMethodID(BoxInfo, "addBox", "(FFFFIF)V");
auto ky_id = env->GetMethodID(BoxInfo, "addKeyPoint", "(FFF)V");
jobjectArray ret = env->NewObjectArray(resultInfo.info.size(), BoxInfo, nullptr);
for (int i = 0; i < nums; ++i) {
auto info = resultInfo.info[i];
env->PushLocalFrame(1);
//jobject obj = env->AllocObject(BoxInfo);
jobject obj = env->NewObject(BoxInfo, init_id);
// set bbox
//LOGW("rect:[%f,%f,%f,%f] label:%d,score:%f \n", info.rect.x,info.rect.y, info.rect.w, info.rect.h, 0, 1.0f);
env->CallVoidMethod(obj, box_id, info.x1, info.y1, info.x2 - info.x1, info.y2 - info.y1,
info.label, info.score);
// set keypoint
for (const auto &kps : info.keypoints) {
//LOGW("point:[%f,%f] score:%f \n", lm.point.x, lm.point.y, lm.score);
env->CallVoidMethod(obj, ky_id, (float) kps.point.x, (float) kps.point.y,
(float) kps.score);
}
obj = env->PopLocalFrame(obj);
env->SetObjectArrayElement(ret, i, obj);
}
return ret;
}
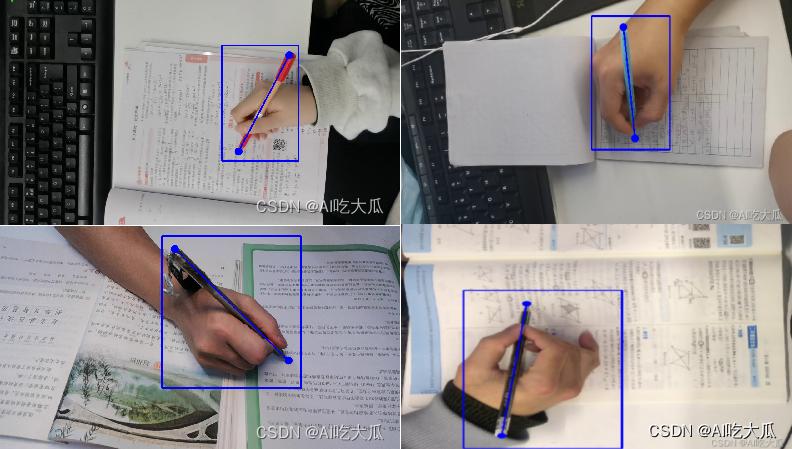
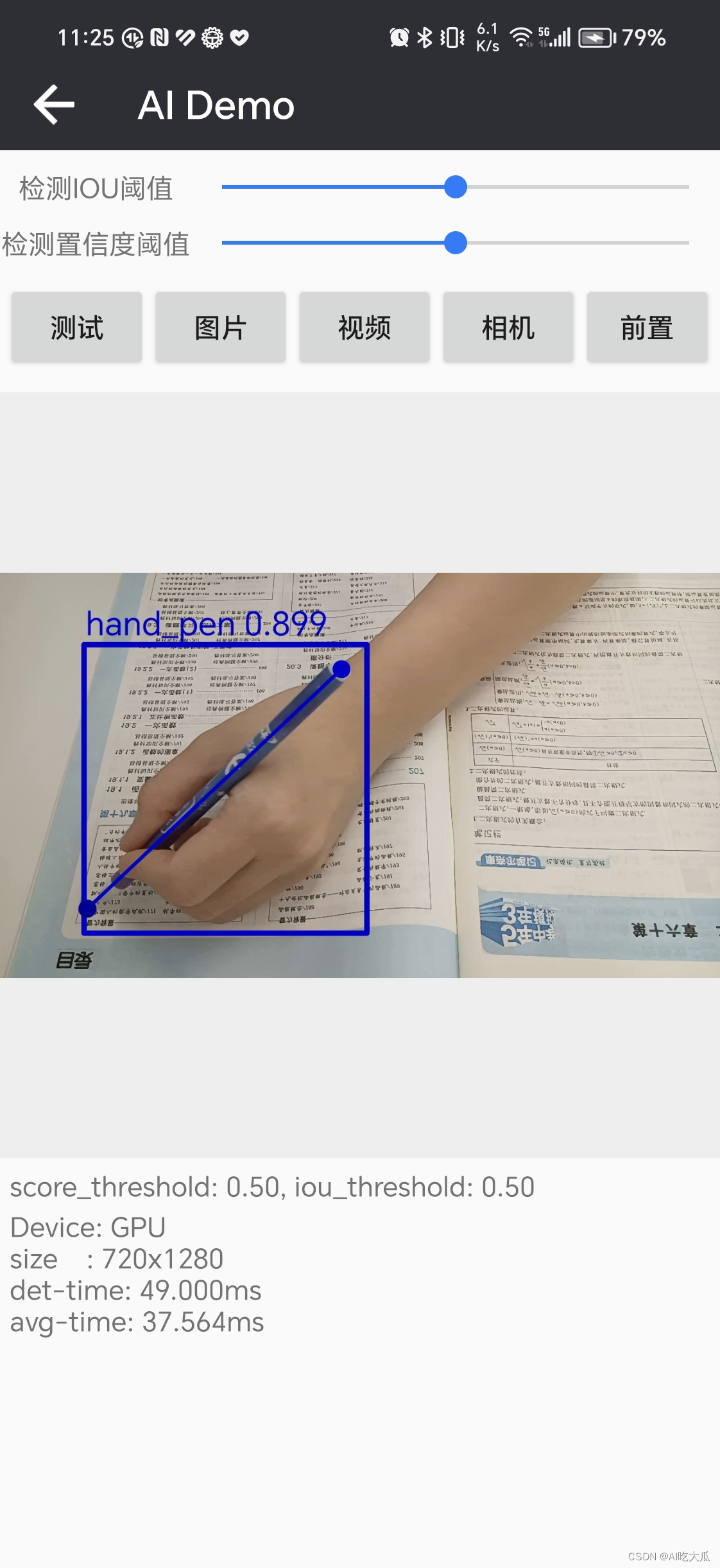
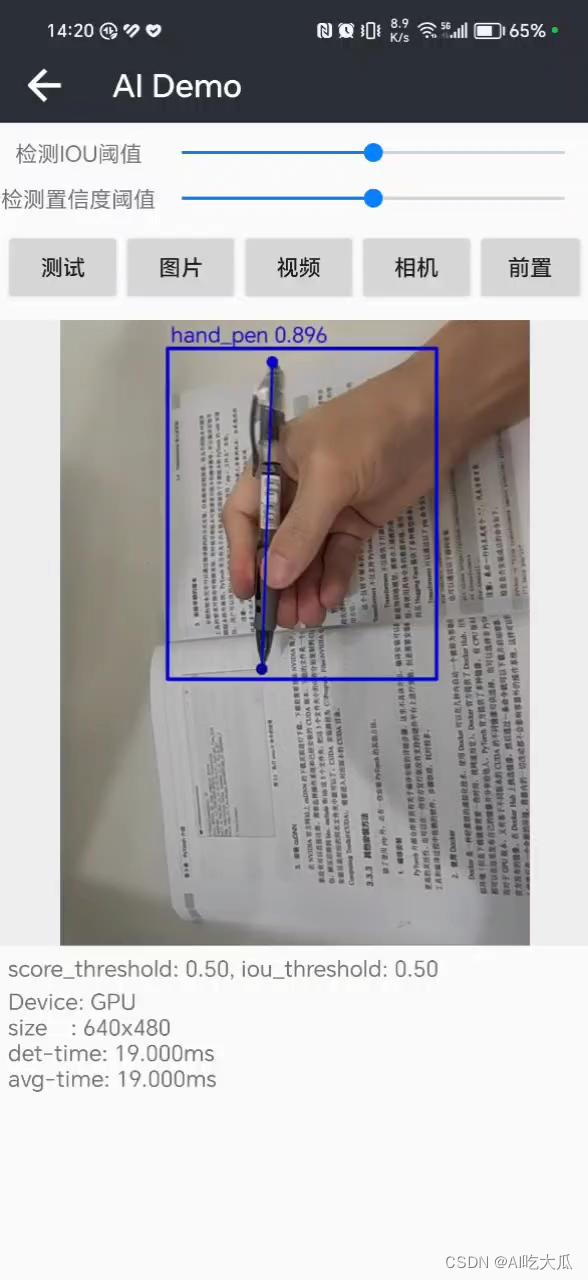
(4) Android测试效果
Android Demo在普通手机CPU/GPU上可以达到实时检测效果;CPU(4线程)约50ms左右,GPU约30ms左右 ,基本满足业务的性能需求。
Android笔尖笔帽关键点检测APP Demo体验(下载):
https://download.csdn.net/download/guyuealian/88535143
(5) 运行APP闪退:dlopen failed: library "libomp.so" not found
参考解决方法:
解决dlopen failed: library “libomp.so“ not found_PKing666666的博客-CSDN博客_dlopen failed
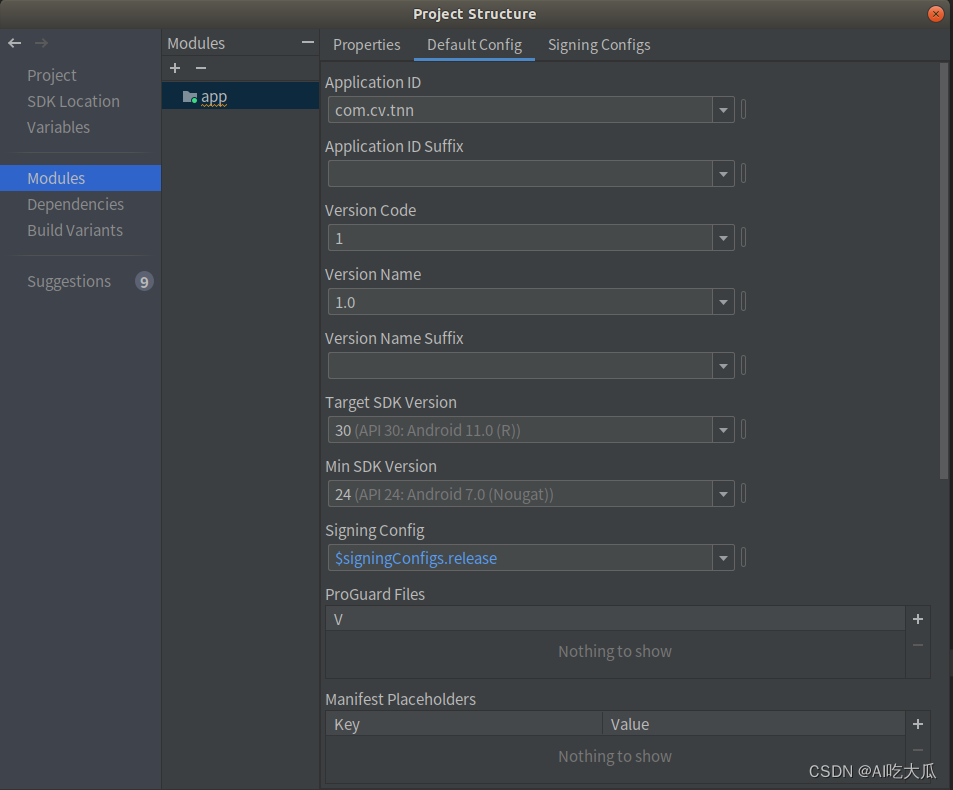
Android SDK和NDK相关版本信息,请参考:

5.Android项目源码下载
Android项目源码下载地址:Android实现笔尖笔帽检测算法(含源码 可是实时检测)
整套Android项目源码内容包含:
- Android Demo源码支持YOLOv5手部检测(手握笔检测)
- Android Demo源码支持轻量化模型LiteHRNet和Mobilenet-v2笔尖笔帽关键点检测
- Android Demo在普通手机CPU/GPU上可以实时检测,CPU约50ms,GPU约30ms左右
- Android Demo支持图片,视频,摄像头测试
- 所有依赖库都已经配置好,可直接build运行,若运行出现闪退,请参考dlopen failed: library “libomp.so“ not found 解决。
6.C++实现笔尖笔帽关键点检测
- 笔尖笔帽检测4:C++实现笔尖笔帽检测算法(含源码 可是实时检测)https://blog.csdn.net/guyuealian/article/details/134070516
7.特别版: 笔尖指尖检测
碍于篇幅,本文章只实现了笔尖笔帽关键点检测;实质上,要实现指尖点读或者笔尖点读功能,我们可能并不需要笔帽检测,而是需要实现笔尖+指尖检测功能;其实现方法与笔尖笔帽关键点检测类似。
下面是成功产品落地应用的笔尖+指尖检测算法Demo,其检测精度和速度性能都比笔尖笔帽检测的效果要好。
如果你需要笔尖+指尖检测算法,可在公众号咨询联系
指尖笔尖Android Demo体检:https://download.csdn.net/download/guyuealian/88558414
指尖笔尖检测Demo01
指尖笔尖检测Demo02