具体目的及原理
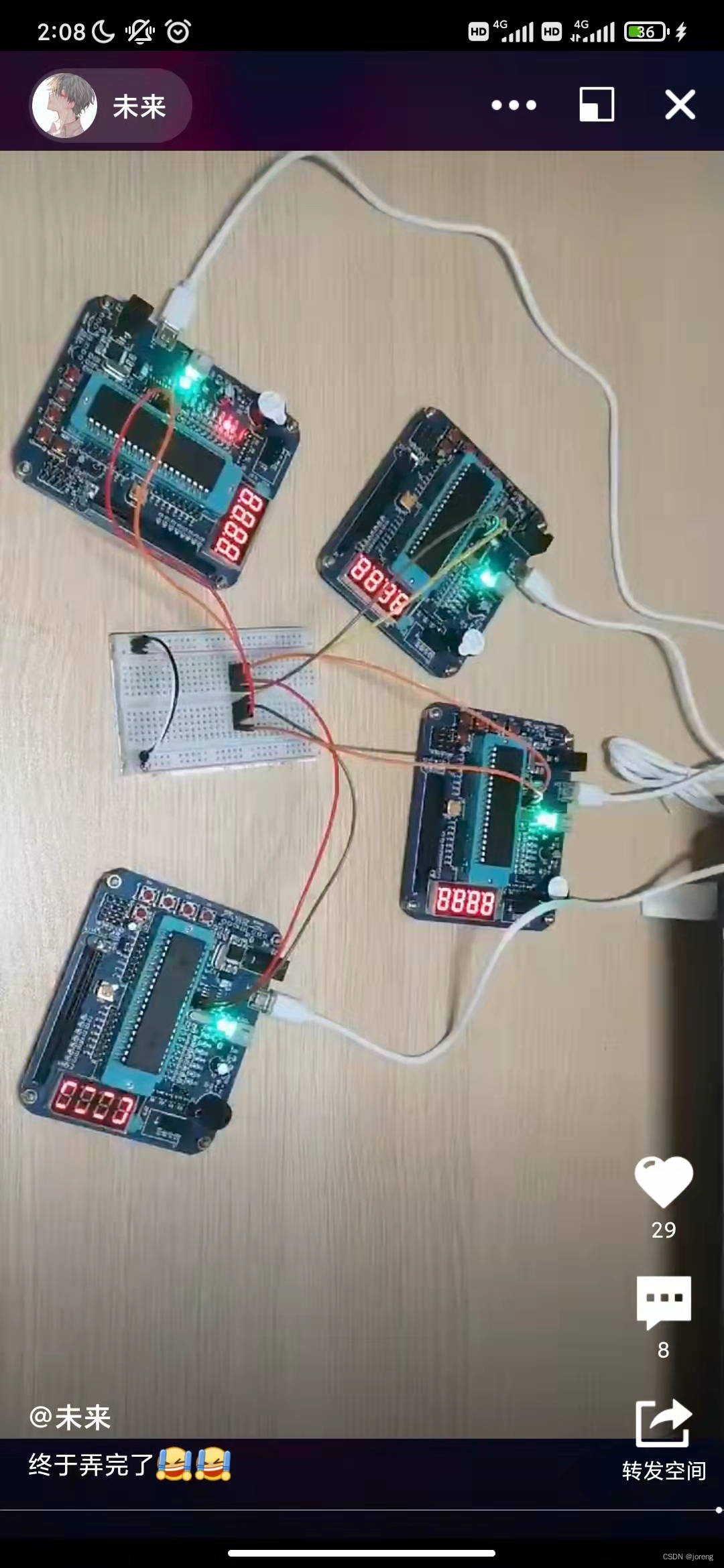
目的:使用一个51单片机作为主机通过面包板链接达到同时控制3个从机的目的。
原理:主机按下任意一个按键通过串口传输协议给所有的从机发送一个数据当做从机是否执行相应指令的开关,每个从机收到对应的指令后执行相对应的操作就行。
注意事项:
面包版的链接须在同一行内进行,因为面包版的同一行是互相连通的,若分开链接则从机不会收到信号的传输
接线时注意是会三合一杜邦线的可以主机的TX接口接到从机的RX接口,不会三合一杜邦线的可以通过面包板来达到同样的效果。
实现代码
主机发送代码:
#include<reg52.h>
sbit k1 = P3^4;
sbit k2 = P3^5;
sbit k3 = P3^6;
void delay(unsigned int xms) //延迟函数
{
unsigned i,j;
for(i=xms;i>0;i--)
for(j=112;j>0;j--);
}
void Send (unsigned char date) //发送函数
{
SBUF = date;
while (!TI);
TI = 0;
}
void main (void)
{
TMOD = 0x20; //设置计数器工作方式2
SCON = 0x40; //设置工作方式1
PCON = 0x00; //SMOD=0.32分频
TH1 = 0xfd; //波特率为6900
TL1 = 0xfd;
TR1 = 1; //打开计数器
ES = 1; //打开接收中断
EA = 1; //打开总中断
while(1)
{
if(k1==0) //判断k1是否按下
{
delay(20); //延时20ms
if(k1==0) //再次判断k1是否按下
{
SBUF=0xA1; //发送0xA1
}
while(!k1); //直到k1松开
}
if(k2==0) //判断k2是否按下
{
delay(20);
if(k2==0)
{
SBUF=0xA2; //发送0xA2
}
while(!k2);
}
if(k3==0) //判断k3是否按下
{
delay(20);
if(k3==0)
{
SBUF=0xA3; //发送0xA3
}
while(!k3);
}
}
}
从机流水灯代码:
#include<reg52.h>
#define uint unsigned int
#define on 0
#define off 1
unsigned char date;
sbit led1=P1^0; //初始化流水灯
sbit led2=P1^1;
sbit led3=P1^2;
sbit led4=P1^3;
sbit led5=P1^4;
sbit led6=P1^5;
sbit led7=P1^6;
sbit led8=P1^7;
void delay(uint xms)
{
uint i,j;
for(i=xms;i>0;i--)
for(j=112;j>0;j--);
}
void ConfigUART(unsigned int baud);
void main()
{
ConfigUART(9600);
while(1)
{
while(!RI);
RI = 0;
date=SBUF;
if(date==0xA1) //若为0xA1信号实现流水灯
{
while(1)
{
led1=on;
delay(200);
led1=off;
led2=on;
delay(200);
led2=off;
led3=on;
delay(200);
led3=off;
led4=on;
delay(200);
led4=off;
led5=on;
delay(200);
led5=off;
led6=on;
delay(200);
led6=off;
led7=on;
delay(200);
led7=off;
led8=on;
delay(200);
led8=off;
}
}
}
}
void ConfigUART(unsigned int baud) //设置接收函数 频率为9600
{
SCON = 0x50;
TMOD &= 0X0F;
TMOD |= 0x20;
TH1 = 256 - (11059200/12/32)/baud;
TL1 = TH1;
ET1 = 0;
TR1 = 1;
}
从机LED流水代码:
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
#define duan P0
unsigned char date;
sbit wei1 =P2^4;
sbit wei2 =P2^5;
sbit wei3 =P2^6;
sbit wei4 =P2^7;
uchar code sz[13]={
0x31,0x09,0x0f,0x01,0x07,0x0b,0x0d,0x0e,0x08,0x38,0x19,0x29,0x39};
void delay (unsigned int xms)
{
unsigned int i,j;
for (i=xms;i>0;i--)
for (j=112;j>0;j--);
}
#include<reg52.h>
void ConfigUART(unsigned int baud);
void main()
{
ConfigUART(9600);
while(1)
{
while(!RI);
RI = 0;
date=SBUF;
if(date==0xA2) //发送的信号为0xA2时执行LED流水代码
{
int m;
while(1)
{
for(m=1;m<100;m++)
{
duan=sz[0];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[3];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[3];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[4];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[5];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[6];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[7];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[8];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[12];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[8];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[9];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[10];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[11];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
for(m=1;m<100;m++)
{
duan=sz[0];
wei1 =1;
wei2 =0;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =1;
wei3 =0;
wei4 =0;
delay(2);
duan=sz[1];
wei1 =0;
wei2 =0;
wei3 =1;
wei4 =0;
delay(2);
duan=sz[2];
wei1 =0;
wei2 =0;
wei3 =0;
wei4 =1;
delay(2);
}
}
}
}
}
void ConfigUART(unsigned int baud)
{
SCON = 0x50;
TMOD &= 0X0F;
TMOD |= 0x20;
TH1 = 256 - (11059200/12/32)/baud;
TL1 = TH1;
ET1 = 0;
TR1 = 1;
}
从机蜂鸣器代码:
#include<reg52.h>
#include<intrins.h>
#define on 0
#define off 1
sbit fm = P2^3;
void delay(unsigned int xms)
{
unsigned int i,j;
for(i=xms;i>0;i--)
for(j=112;j>0;j--);
}
void ConfigUART(unsigned int baud);
void main()
{
ConfigUART(9600);
while(1)
{
if(date==0xA3){
//信号为0XA3执行蜂鸣器代码
while(1){
P1 = 0xfe;//1111 1110
delay(100);
P1 = _crol_ (P1,1);
fm = on;
delay(100);
fm = off;
}
}
}
}
void ConfigUART(unsigned int baud)
{
SCON = 0x50;
TMOD &= 0X0F;
TMOD |= 0x20;
TH1 = 256 - (11059200/12/32)/baud;
TL1 = TH1;
ET1 = 0;
TR1 = 1;
}
图片展示