写在前沿:
这部分,我自己还没完全弄懂,有些地方还未理解。写下来是因为,放在这上面,我会抽时间回来看看,然后进行补充,放在这里,主要是给自己提个醒,并且之后弄懂了,也会将其一些函数用法,已经其原理进行一一阐述。
尺寸测量
1.导入相关库
from scipy.spatial import distance as dist
#导入imutils库,以及该库的perspective模块和contours模块,用于图像处理。
import imutils
from imutils import perspective
from imutils import contours
#导入numpy用于创建数组,cv2用于图像处理。
import numpy as np
import cv2
import matplotlib.pyplot as plt
2.读取参照物和待测物
参照物img_reference
image
# 读取参照物, 比例不能缩放
img_reference = cv2.imread('yaoshi2.jpg')
# 读取需要呗测量的物体
image = cv2.imread('yaoshi3.jpg')
if not image.data: # 检查是否读入图片
print("read image wrong!")
if not img_reference.data:
print("read img_reference wrong")
# 图像混合
# 创建空三维数组用来储存参照物
rows,cols,channels = img_reference.shape
# 将参照物放进刚才创建的二维数组
rio = image[0:rows,0:cols]
# 将图片的左上角换成参照物
res = cv2.addWeighted(img_reference, 1, rio, 0, 0)
dst1 = image.copy()#对原图像进行拷贝
dst1[0:rows,0:cols] = res
#展示
cv2.imshow('dst1',dst1)
cv2.waitKey()
cv2.destroyAllWindows()
这里的图像混合我在前面的的文件和总结都用过
cv2.addWeighted(img_reference, 1, rio, 0, 0)
1代表img_reference的权重比,1代表全是img_reference
第一个0代表rio的权重比,0表示完全被覆盖
第二个0代表其rio的亮度

3图像处理
高斯滤波:
- cv2.GaussianBlur(src, ksize, sigmaX),返回与原图相同尺寸变得更清晰的图
- src:输入图像
- ksize:高斯核大小
- sigmaX:X方向上的高斯核标准偏差
边缘检测:
- cv2.Canny(image, threshold1, threshold2),返回一副二值图,其中包含检测出的边缘
- image:需要处理的原图像,该图像必须为单通道的灰度图
- threshold1:阈值1
- threshold2:阈值2
较大的阈值2用于检测图像中明显的边缘,但一般情况下检测的效果不会那么完美,边缘检测出来是断断续续的。所以这时候用较小的第一个阈值用于将这些间断的边缘连接起来
膨胀去噪
dilate = cv2.dilate(imgray, None, iterations=1)
腐蚀去噪
erosion = cv2.erode(dilate, None, iterations=1)
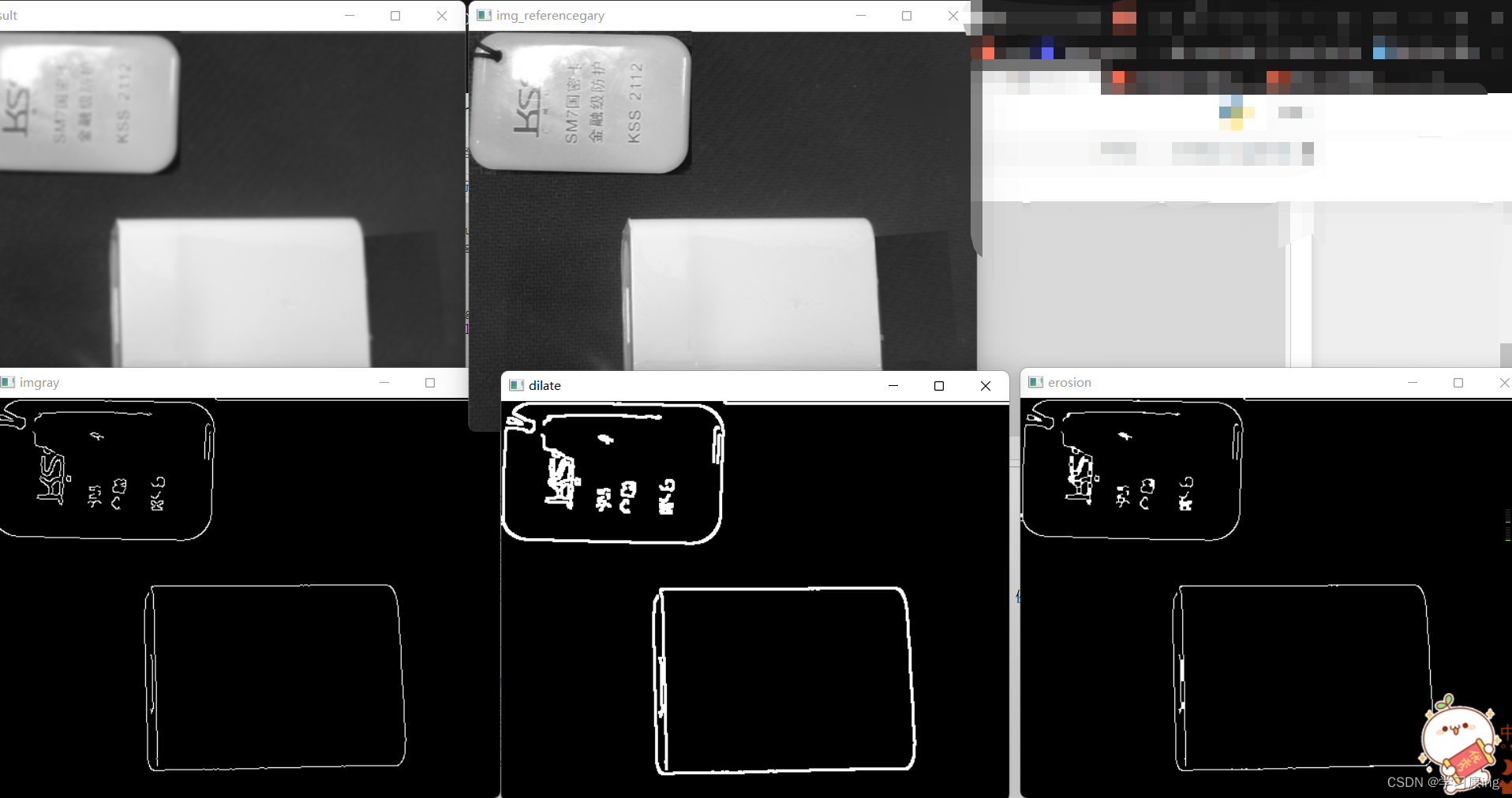
正文
# 加载图像,将其转换为灰度,然后稍微模糊
img_referencegary = cv2.cvtColor(dst1, cv2.COLOR_BGR2GRAY)
cv2.imshow('img_referencegary',img_referencegary)
cv2.waitKey()
# 高斯滤波,图像变得更清晰
result = cv2.GaussianBlur(img_referencegary,(7,7), sigmaX=0, sigmaY=0)
cv2.imshow('result',result)
cv2.waitKey()
# 执行边缘检测,然后执行膨胀+腐蚀以闭合对象边缘之间的间隙
# 边缘检测
imgray = cv2.Canny(result, 50,100)
cv2.imshow('imgray',imgray)
cv2.waitKey()
# 膨胀去噪
dilate = cv2.dilate(imgray, None, iterations=1)
cv2.imshow('dilate',dilate)
cv2.waitKey()
# 腐蚀去噪
erosion = cv2.erode(dilate, None, iterations=1)
cv2.imshow('erosion',erosion)
cv2.waitKey()
cv2.destroyAllWindows()
4 轮廓检测并初始化变量
轮廓检测:
- cv2.findContours(image, mode, method)参数说明如下。
- image:接受的参数为二值图,即黑白的(不是灰度图)
- mode:cv2.RETR_EXTERNAL表示只检测外轮廓
- method:cv2.CHAIN_APPROX_SIMPLE压缩水平方向,垂直方向,对角线方向的元素,只保留该方向的终点坐标,例如一个矩形轮廓只需4个点来保存轮廓信息
轮廓获取可调用imutils.grab_contours(cnts)函数实现,其中cnts为轮廓检测的返回值。
实现轮廓检测并设定尺寸测量的初始化变量。
# 图形的轮廓检测
edged = erosion.copy()
cnts = cv2.findContours(edged,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
cnts = imutils.grab_contours(cnts) # 获取 cnts中的 countors(轮廓)
# print(cnts)
# 从左到右对轮廓进行排序,并初始化“pixels_per_metric”校准变量
# 返回已排序轮廓和边界框的列表
(cnts,boundingBoxes) = contours.sort_contours(cnts)
# 初始化比例系数
pixelsPerMetric = None
# 本代码使用的参照物自己拍照的门禁钥匙
width = 3
# 参照物的宽度(注意:是width,不是 height),单位:cm
5 绘制轮廓并检测真实长度***
计算闭合轮廓的面积可使用cv2.contourArea(cnts)函数,其中cnts为检测到的轮廓。
获取包含点集的最小矩形框和矩形框的四个顶点,主要使用cv2.minAreaRect©和cv2.boxPoints(box)两个函数,其中cv2.minAreaRect(cnts)的参数为检测到的轮廓,cv2.boxPoints(box)的参数为cv2.minAreaRect()的返回值,而这两个函数一般结合使用。
通过for循环遍历轮廓点集,并在循环里绘制所检测的轮廓和实现真实长度的测量。
def midpoint(A, B):
return ((A[0] + B[0]) * 0.5, (A[1] + B[1]) * 0.5)
# loop over the contours individually--分别在轮廓上循环
for c in cnts:
# if the contour is not sufficiently large, ignore it--如果轮廓不够大,请忽略它
if cv2.contourArea(c) < 100:
continue
# compute the rotated bounding box of the contour--计算轮廓的旋转边界框
orig = image.copy()
box = cv2.minAreaRect(c)
# 求能包含点集的最小矩形框
box = cv2.boxPoints(box)
# 求矩形框的四个顶点
box = np.array(box, dtype="int")
# 对轮廓中,根据点的x坐标对点进行排序,使其以左上、右上、右下和左下的顺序出现,然后绘制旋转边界的轮廓
# box return the coordinates in top-left, top-right,bottom-right, and bottom-left order
box = perspective.order_points(box)
cv2.drawContours(orig, [box.astype("int")], -1, (0, 255, 0), 2)
#cv2.drawContours(image, contours, contourIdx, color, thickness=None, lineType=None, hierarchy=None, maxLevel=None, offset=None)
#第一个参数是指明在哪幅图像上绘制轮廓;image为三通道才能显示轮廓
#第二个参数是轮廓本身,在Python中是一个list;
#thickness参数指定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓。
#其中thickness表明轮廓线的宽度如果是-1(cv2.FILLED),则为填充模式。
# 在原始点上循环并绘制它们
for (x, y) in box:
cv2.circle(orig, (int(x), int(y)), 5, (0, 0, 255), -1)#-1四个原点的填充
# unpack the ordered bounding box,
# then compute the midpoint between the top-left and top-right coordinates,
# followed by the midpoint between bottom-left and bottom-right coordinates
# 打开有序边界框,然后计算左上角和右上角坐标之间的中点,然后计算左下角和右下角坐标之间的中点
(tl, tr, br, bl) = box
(tltrX, tltrY) = midpoint(tl, tr)
(blbrX, blbrY) = midpoint(bl, br)
# compute the midpoint between the top-left and top-right points,
# followed by the midpoint between the top-righ and bottom-right
# 计算左上角点和右上角点之间的中点,然后计算右上角点和右下角点之间的中点
(tlblX, tlblY) = midpoint(tl, bl)
(trbrX, trbrY) = midpoint(tr, br)
# draw the midpoints on the image--画出线段的中点
cv2.circle(orig, (int(tltrX), int(tltrY)), 5, (255, 0, 0), -1)
cv2.circle(orig, (int(blbrX), int(blbrY)), 5, (255, 0, 0), -1)
cv2.circle(orig, (int(tlblX), int(tlblY)), 5, (255, 0, 0), -1)
cv2.circle(orig, (int(trbrX), int(trbrY)), 5, (255, 0, 0), -1)
# draw lines between the midpoints--在中点之间画线
cv2.line(orig, (int(tltrX), int(tltrY)), (int(blbrX), int(blbrY)), (255, 0, 255), 2)
cv2.line(orig, (int(tlblX), int(tlblY)), (int(trbrX), int(trbrY)), (255, 0, 255), 2)
# compute the Euclidean distance between the midpoints
# 计算中点之间的欧几里德距离
dA = dist.euclidean((tltrX, tltrY), (blbrX, blbrY))
dB = dist.euclidean((tlblX, tlblY), (trbrX, trbrY))
# if the pixels per metric has not been initialized, then
# compute it as the ratio of pixels to supplied metric
# (in this case, inches)
# 如果每个度量的像素尚未初始化,则将其计算为像素与提供的度量的比率(cm)
if pixelsPerMetric is None:
pixelsPerMetric = dB / width
# compute the size of the object--计算对象的大小
dimA = dA / pixelsPerMetric
dimB = dB / pixelsPerMetric
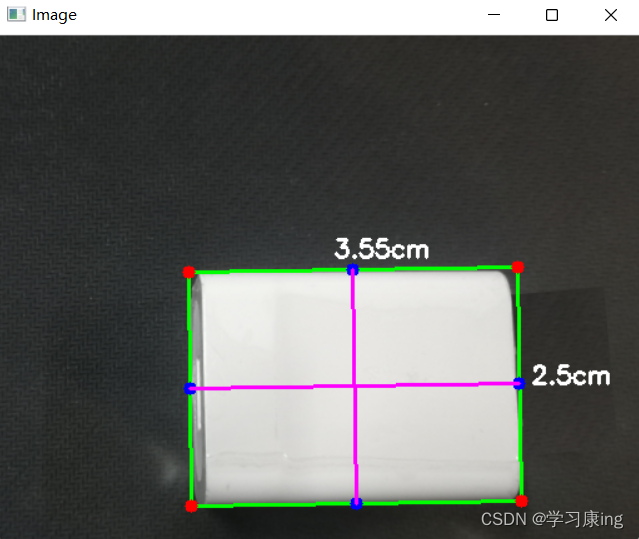
# draw the object sizes on the image--在图像上绘制对象大小
# in: 英寸, 1 in = 25.4 mm, 1 mm = 0.03937 in
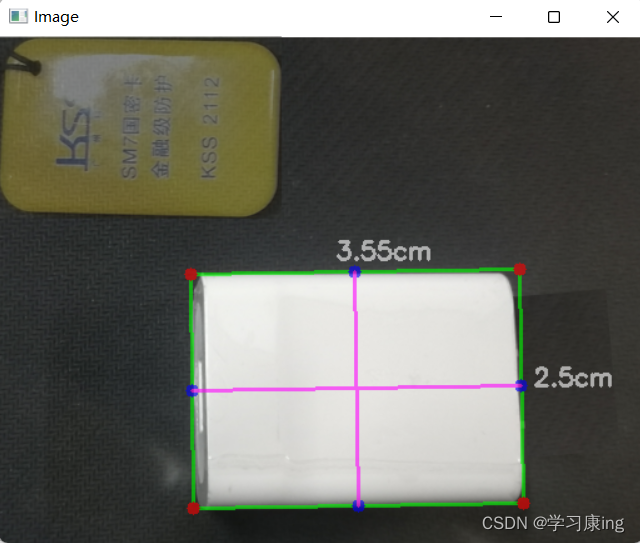
cv2.putText(orig, "{
:.2f}cm".format(dimB), # 长
(int(tltrX - 15), int(tltrY - 10)), cv2.FONT_HERSHEY_SIMPLEX, 0.65, (255, 255, 255), 2)
cv2.putText(orig, "{
:.1f}cm".format(dimA),
(int(trbrX + 10), int(trbrY)), cv2.FONT_HERSHEY_SIMPLEX,0.65, (255, 255, 255), 2)
cv2.imshow("Image", orig)
cv2.waitKey(0)
cv2.destroyAllWindows()
6 展示检测的图片
# 将左上角被替换为参照物的位置恢复
rows,cols,channels = orig.shape
rio = dst1[0:rows,0:cols]
res = cv2.addWeighted(orig, 0.6, rio, 0.4, 0)
dst2 = image.copy()#对原图像进行拷贝
dst2[0:rows,0:cols] = res
cv2.imshow("Image", dst2)
cv2.waitKey(0)
cv2.destroyAllWindows()
7 定义闭合轮廓的面积计算函数
自定义闭合轮廓面积的计算函数contourArea(),设定轮廓参数为cnt。
def contourArea(cnt): # 传入一个轮廓
# 最小外接矩形
rect = cv2.minAreaRect(cnt)
# 求矩形的四个顶点
box = cv2.boxPoints(rect)
box = np.int0(box)
return cv2.contourArea(box) # 计算闭合轮廓的面积
8 定义面积测量函数
自定义measure_object()函数用于计算测量面积。
def measure_object(image):
gray = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY) # 灰度化
ret, binary = cv2.threshold(gray, 0, 255, cv2.THRESH_BINARY | cv2.THRESH_OTSU) # 二值化(cv.THRESH_OTSU: 自动求出最优阈值)
# 打印阈值
print("threshold value: %s"%(ret)) #分割的阈值
# 展示二值化图片
cv2.imshow('binary',binary)
cv2.waitKey(0)
cv2.destroyAllWindows()
contours, hierarchy = cv2.findContours(binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE) # 检测轮廓
#print(contours)
for contour in contours:
if cv2.contourArea(contour)<100:# 如果轮廓不够大,则舍去,我们只检测拥有一定轮廓的物体
continue
area = contourArea(contour)
return area
9 计算参照物和被检测物体的面积
# 参照物像素计算
img_reference = cv2.imread('yaoshi2.jpg')
reference_pixel_area = measure_object(img_reference) # 参照物像素:30843.0
#print('参照物像素:',reference_pixel_area)
# 计算其真实面积, # 6
real_area = width*2
# 求每个像素占多少面积: 像素 / 真实面积
per_pixel_area = reference_pixel_area/real_area
print(per_pixel_area)
# 5140.5
# 被测零件像素计算
img = cv2.imread('yaoshi3.jpg')
img_area = measure_object(img)
lingjian_area = img_area/per_pixel_area
img_area
# 真实物像素:47866.0
# 9.311545569497131
print('reference_pixel_area ',reference_pixel_area)
print('real_area ',real_area)
print('per_pixel_area ',per_pixel_area)
print('lingjian_area ',lingjian_area)
总的来说不简单,第四部分我自己还有还有部分没弄清楚,后续会在这篇文件上去更改
其余部分基本上不难,一些点我都进行了分析和注释,最重要的是理解每个函数到底是干什么用,后续会对这些函数进行一个总结,基本上会1-2节总结一次,也许有些总结都是重复的,但是看得越多也就能记得越多啦。