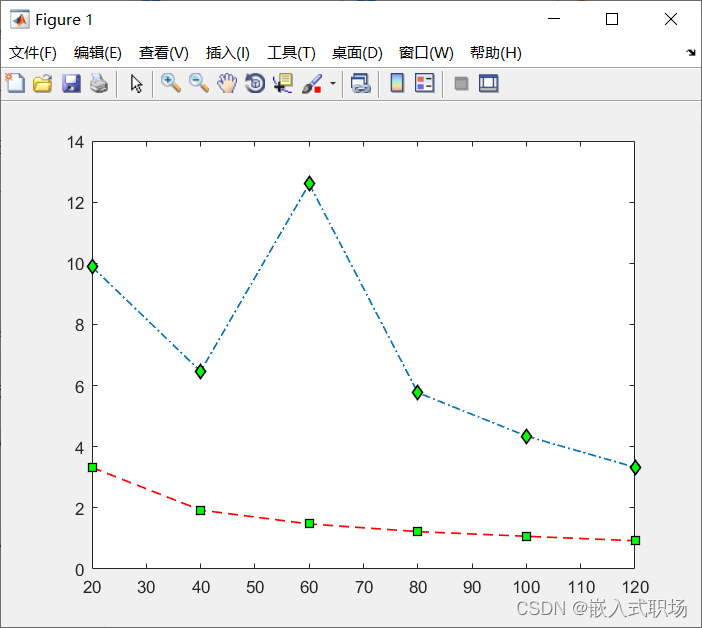
平均定位误差随锚点数的变化情况
-
clear all;:清除 MATLAB 的工作空间中的所有变量。 -
edgelen=100;:定义了区域的边长为 100。 -
kr=0.1;:定义了噪声因子。 -
ancnum=100;:定义了锚点(anchor points)的数量为 100。 -
unknownnum=10;:定义了未知点(unknown points)的数量为 10。 -
choicepointsnum=6;:定义了选择点(choice points)的数量为 6。 -
anchornum=20:20:120;:定义了锚点数量的范围为 20 到 120,步长为 20。