文章目录
前言
Lightware SF45/B 激光雷达(Lightware SF45/B lidar)是一种小型扫描激光雷达(重约 50g),扫描度可达 350 度,扫描范围 50m。

1 安装SF45/B
SF45/B 应安装在飞行器顶部或底部,以便激光雷达水平扫描。理想情况下,阻碍激光雷达视线的飞行器部件(GPS 杆、飞行器支腿等)数量应减少到最低限度。
2 连接自动驾驶仪
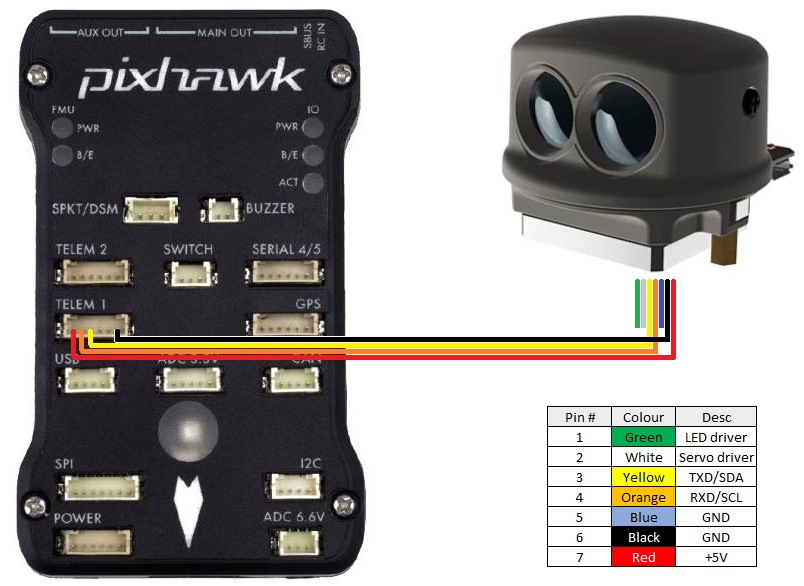
激光雷达可以连接到任何串行端口,但如果直接从自动驾驶仪为传感器供电(即不使用 BEC),请确保端口能够提供所需的 300mW 电流。许多兼容 Pixhawk 的自动驾驶仪可以为 Serial1 提供比其他端口更大的功率,因此这可能是最佳选择。
3 通过地面站进行配置
下面是第一个接近传感器的设置示例:
- SERIAL1_PROTOCOL = "11"("Lidar360"),如果使用 Serial1;
- SERIAL1_BAUD = "115",如果使用 Serial1;
- PRX1_TYPE = "8" (LightwareSF45B);
- PRX1_ORIENT = "0",如果安装在飞行器顶部;PRX1_ORIENT = "1",如果倒置安装在飞行器底部;
- PRX1_YAW_CORR 用于调整激光雷达的前进方向。例如,如果激光雷达朝前,该参数可设为 0;如果朝后,则应设为 180;
- PRX1_IGN_ANG1 和 PRX1_IGN_WID1 参数允许定义飞行器周围应忽略的区域。例如,要避免右侧 20 度区域,可将 PRX1_IGN_ANG1 设置为 90,将 PRX1_IGN_WID1 设置为 20。
4 参数说明
1、SERIAL1_PROTOCOL:串行1协议选择
注意:更改后需要重新启动。
控制 Serial1 端口应使用何种协议。请注意,Frsky 选项需要外部转换器硬件。详情请查看维基百科。
| Values |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|