文章目录
前言
Copter、Plane 和 Rover 支持光流传感器。这些是相机模块,使用地面纹理和可见特征来确定飞机的地面速度。
选择下面的链接,了解可用传感器的信息。
25.1 光学流量传感器的测试和设置
篇幅过多,另起一篇介绍:
25.2 Cheerson CX-OF 光流
Cheerson CX-OF 光流量传感器重量轻、成本低,可用于改善水平位置控制,尤其是在 GPS 信号被剥夺的环境中。
25.2.1 在哪里购买
该传感器可从 Banggood.com 和 AliExpress 等多家零售商处购买。搜索"CX-OF 备件"可找到更多零售商。
这些替代方法也已证明有效:
这些替代方法可能有效,但尚未得到证实:
25.2.2 与自动驾驶仪连接
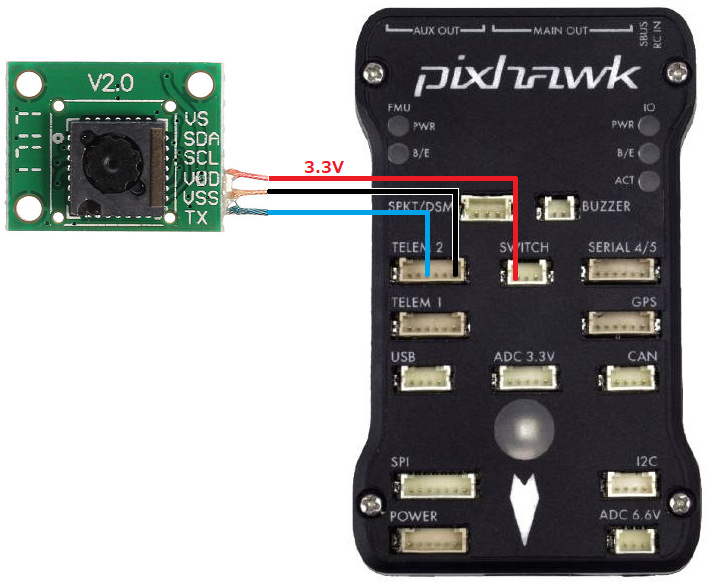
光流量传感器应安装在旋翼飞机底部,摄像头镜头朝下。传感器上标有"V2.0"的一面应朝向飞行器的前方。上图不正确,因为自动驾驶仪的箭头朝下,而传感器的"V2.0"标签靠近顶部。
将传感器的 TX 和 VSS(又称 GND)引脚连接到自动驾驶仪的一个串行端口。上图中,传感器连接到 Pixhawk 的 Telem2 端口。
将传感器的 VDD(又称 VCC 或 3.3V)连接到 3.3V 电源。上图中使用的是 Pixhawk 的开关端口,但也可以使用 SPKT/DSM 端口的电源引脚。
设置 FLOW_TYPE = 4。
如果使用 Serial2/Telem2,则设置 SERIAL2_PROTOCOL = 18;如果连接到其他串行端口,则使用相应的 SERIALx_PROTOCOL 参数。
25.2.3 附加说明
与 PX4Flow 传感器(PX4Flow sensor)一样,使用该传感器的自主模式(包括 Loiter 和 RTL)也需要测距仪。
FlowHold 不需要使用测距仪。
该传感器已在约 40m 的高度成功进行了测试。
可以通过设置传感器位置参数(sensors position parameters)来提高性能。例如,如果传感器安装在框架旋转中心向前 2cm、向下 5cm 的位置,则将 FLOW_POS_X 设置为 0.02,将 FLOW_POS_Z 设置为 0.05。
25.2.4 测试和设置
有关设置指南,请参阅光学流量传感器测试和设置(Optical Flow Sensor Testing and Setup)。
请注意,该传感器的 EK2_FLOW_DELAY 或 EK3_FLOW_DELAY 推荐值为 80。
25.3 Hex HereFlow 光学流量传感器
篇幅过多,另起一篇介绍:
25.4 PX4FLOW光学流量相机板
篇幅过多,另起一篇介绍:
25.5 用于光流的OpenMV
篇幅过多,另起一篇介绍:
25.6 UPixels UPFlow光流
篇幅过多,另起一篇介绍:
25.7 ARK Flow开放源码光学流量和距离传感器
篇幅过多,另起一篇介绍: