注:不是标准答案,可能存在错误,只是自己做完了和同学核对之后的结果,仅分享,欢迎指正错误
第一单元
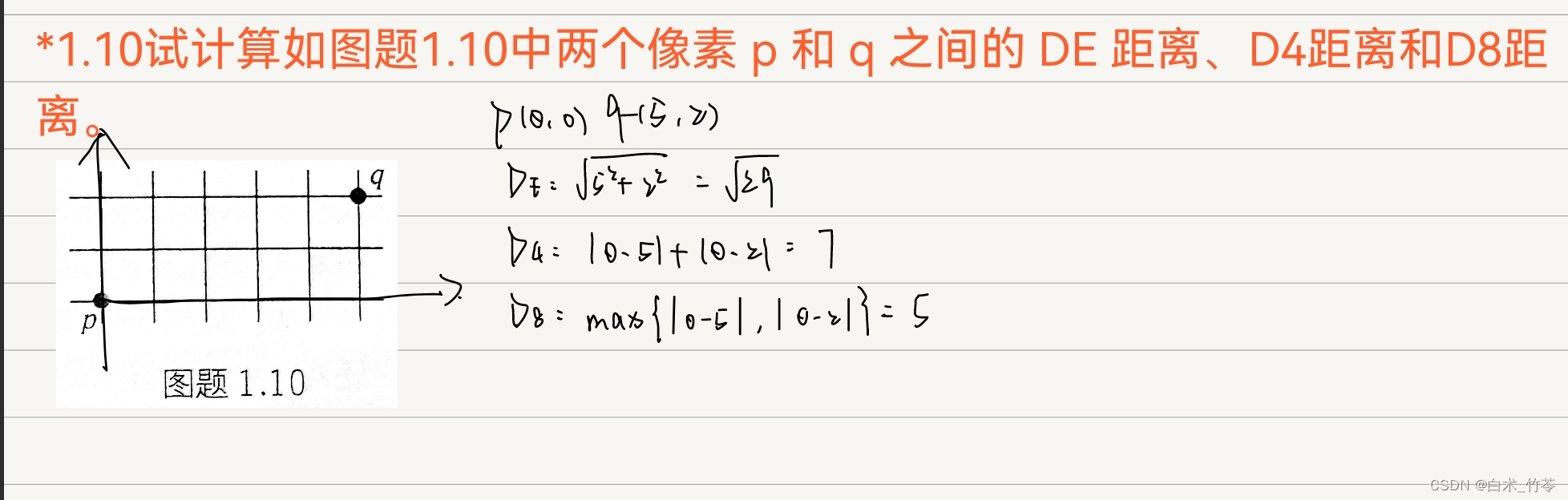
*1.10试计算如图题1.10中两个像素p和q之间的DE距离、D4距离和D8距离
第二单元
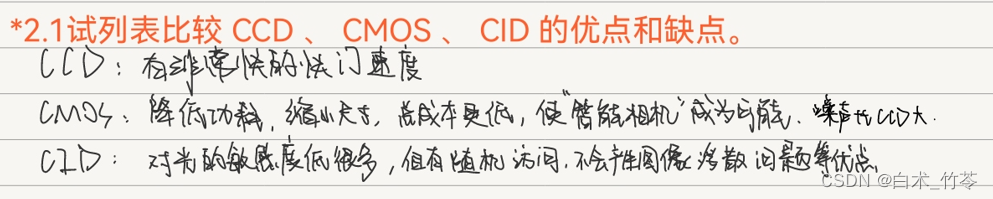
*2.1试列表比较CCD 、CMOS 、CID的优点和缺点。
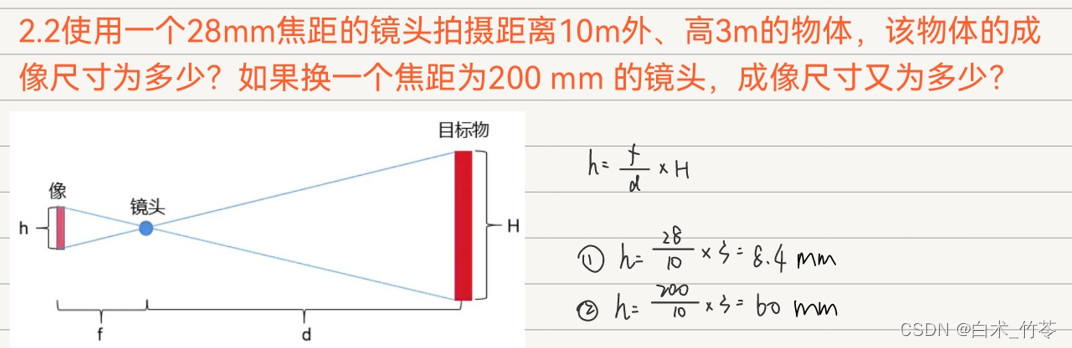
2.2使用一个28mm焦距的镜头拍摄距离10m外、高3m的物体,该物体的成像尺寸为多少?如果换一个焦距为200 mm 的镜头,成像尺寸又为多少?
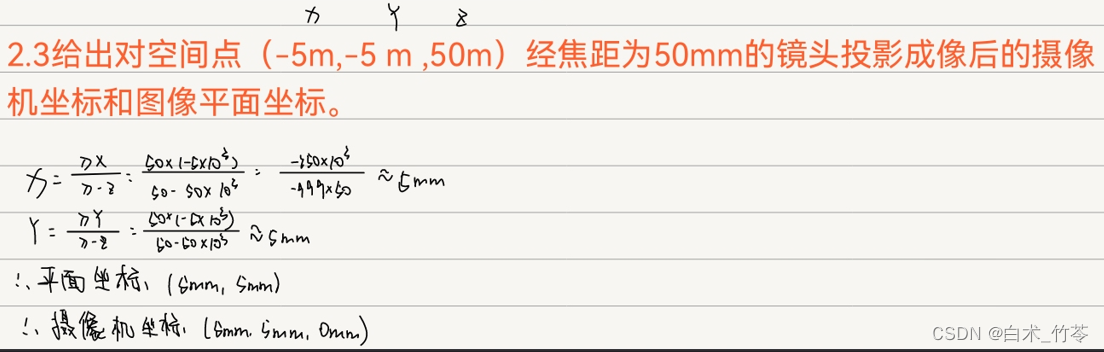
2.3给出对空间点(-5m,-5 m ,50m)经焦距为50mm的镜头投影成像后的摄像机坐标和图像平面坐标。
第三单元
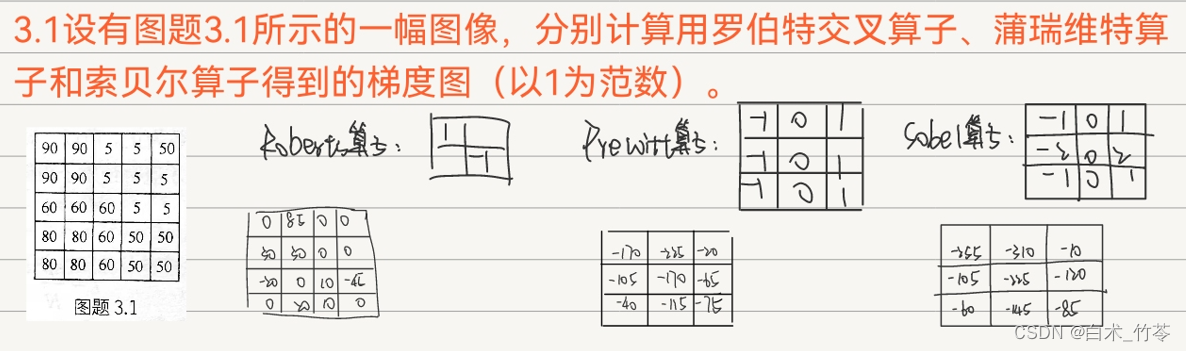
3.1设有图题3.1所示的一幅图像,分别计算用罗伯特交叉算子、蒲瑞维特算子和索贝尔算子得到的梯度图(以1为范数)
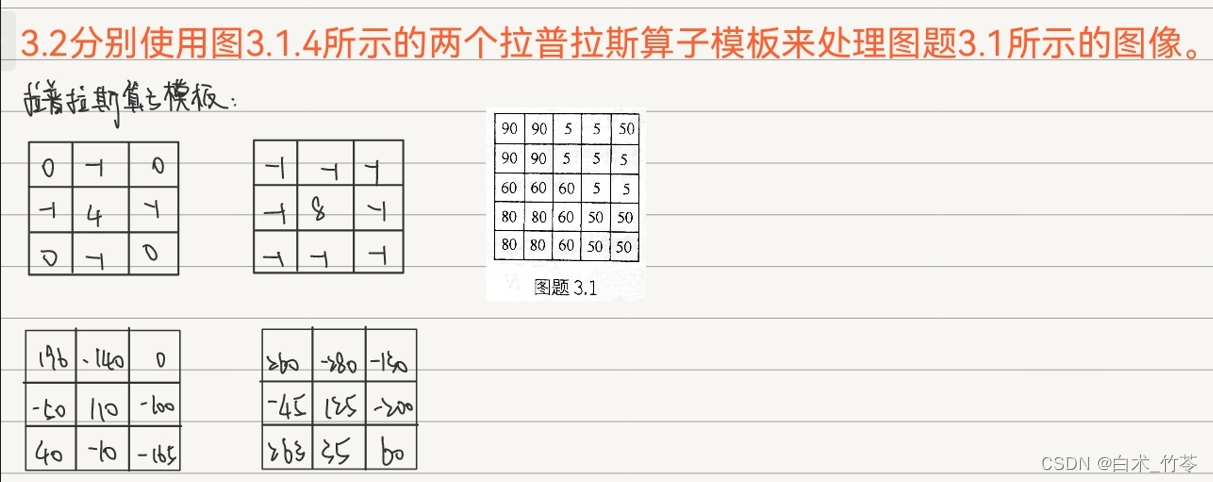
3.2分别使用图3.1.4所示的两个拉普拉斯算子模板来处理图题3.1所示的图像。
第五单元
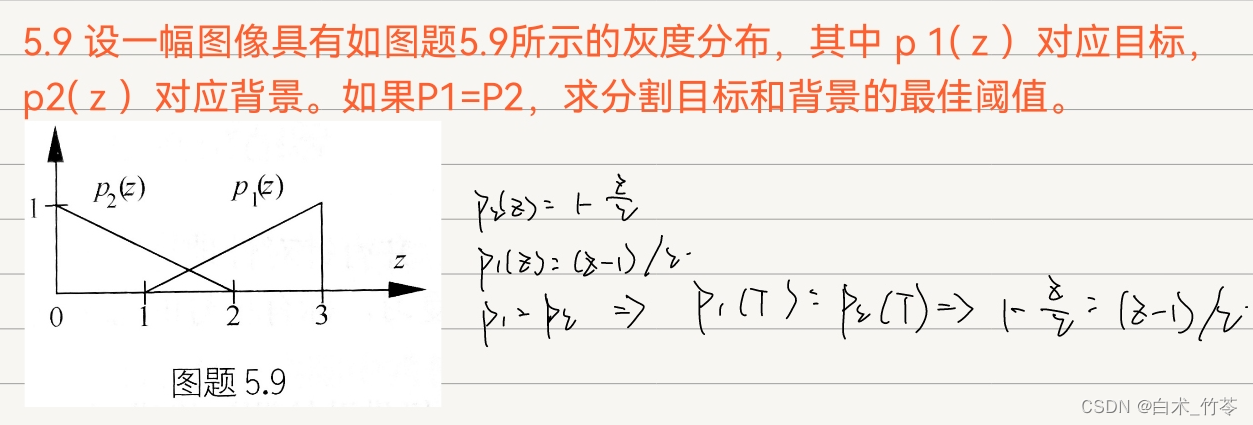
5.9设一幅图像具有如图题5.9所示的灰度分布,其中p 1(z)对应目标,p2(z)对应背景。如果P1=P2,求分割目标和背景的最佳阈值。
第六单元
*6.1
(1)试解释为什么利用6.1.1小节中的链码起点归一化方法可使得到的链码与边界的起点无关?计算对链码10767655433221进行起点归一化后的起点。2)试解释为什么利用6.1.1小节中的链码旋转归一化方法可使得到的链码与边界的旋转无关?计算链码2111010103030332323221的一阶差分。
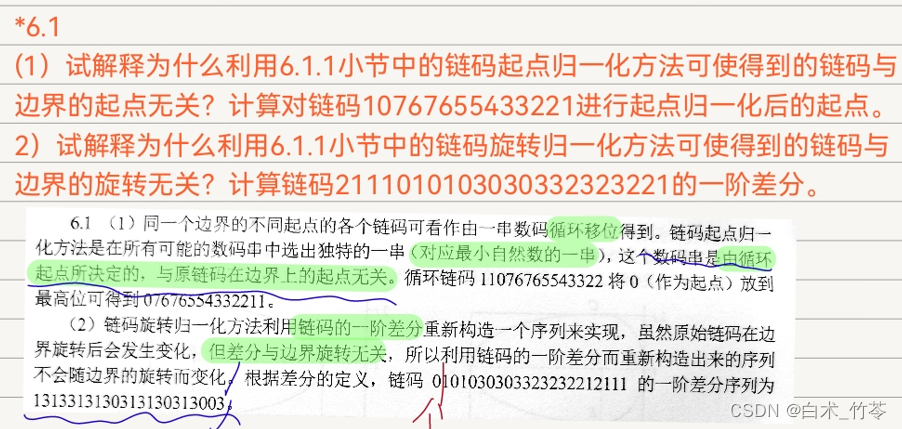
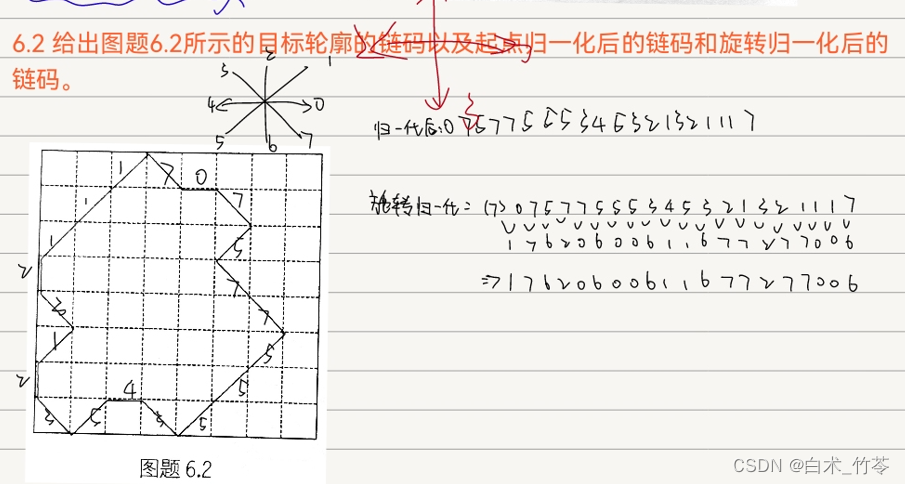
6.2给出图题6.2所示的目标轮廓的链码以及起点归一化后的链码和旋转归一化后的链码。
第七单元
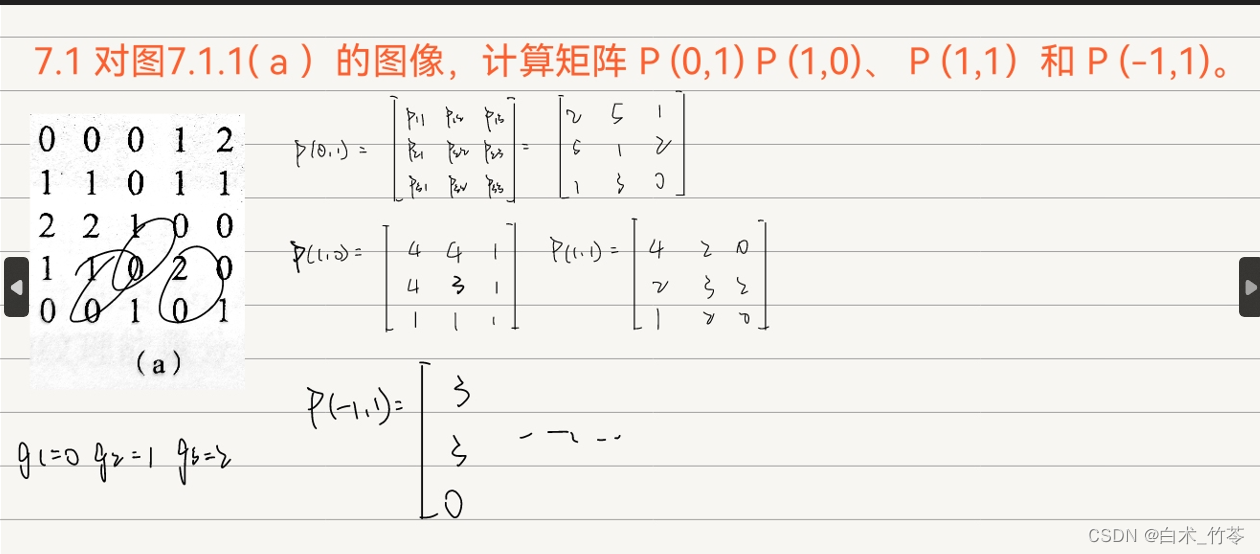
7.1对图7.1.1( a)的图像,计算矩阵P(0,1)P(1,0)、P(1,1)和P(-1,1)。
第八单元
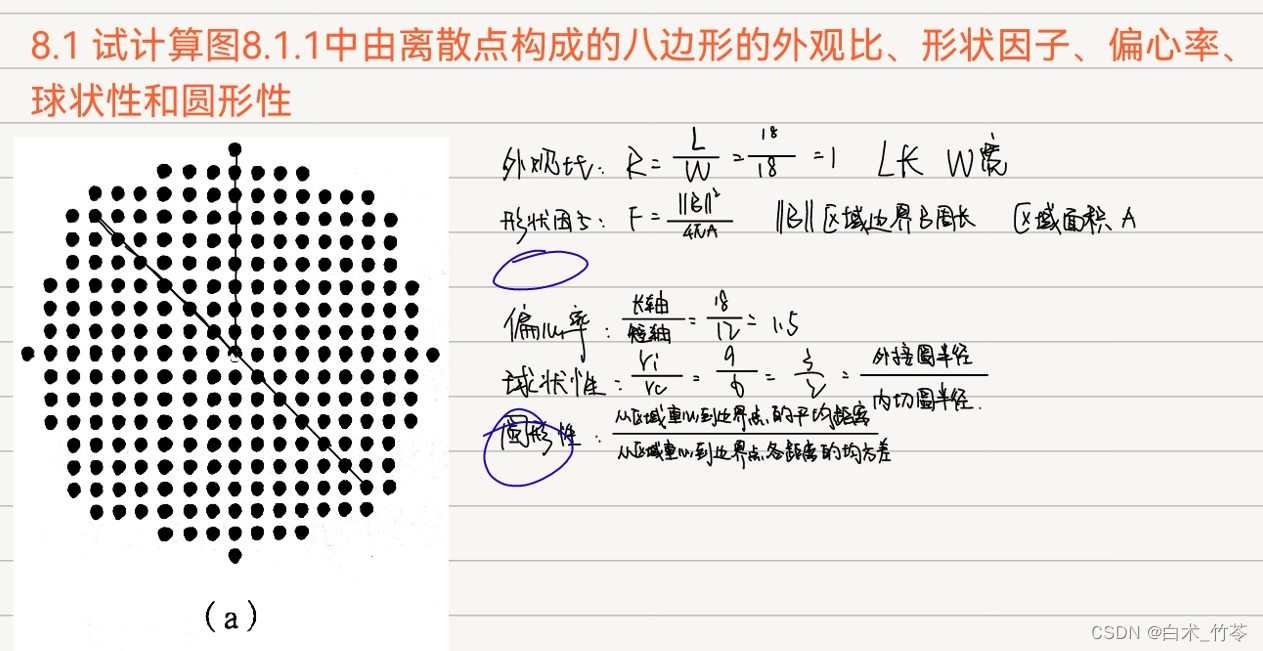
8.1试计算图8.1.1中由离散点构成的八边形的外观比、形状因子、偏心率、球状性和圆形性
第九单元
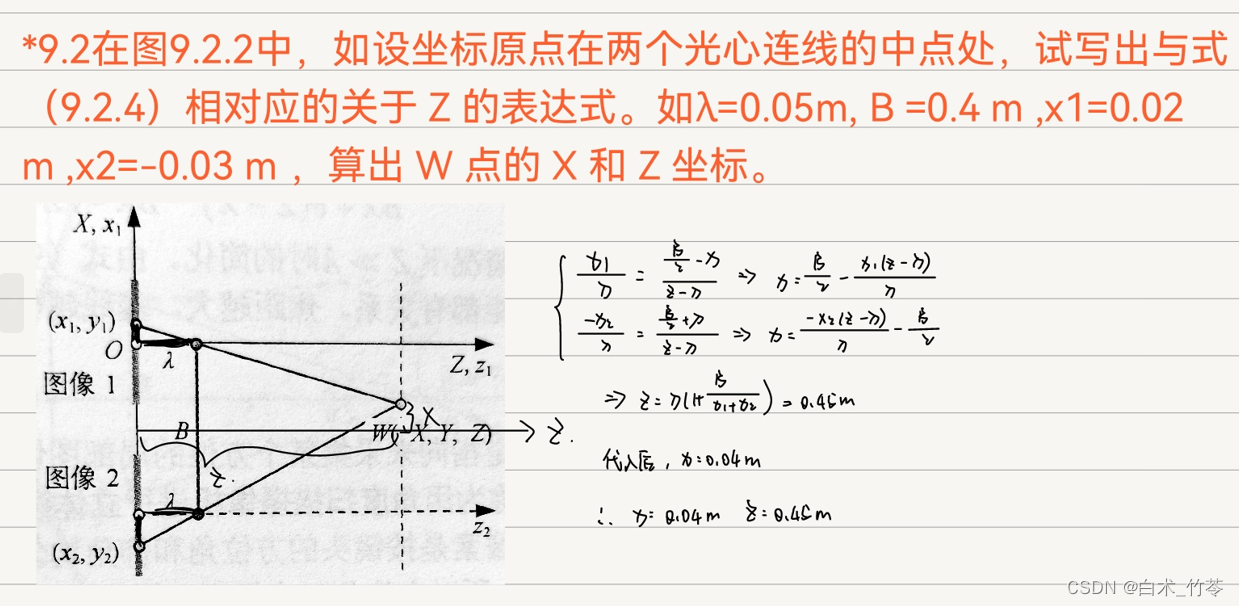
*9.2在图9.2.2中,如设坐标原点在两个光心连线的中点处,试写出与式(9.2.4)相对应的关于Z的表达式。如入=0.05m, B =O.4 m ,x1=0.02m ,x2=-0.03 m ,算出W点的×和Z坐标。
第十一单元
11.3试比较运动检测的两种方法(利用图像差的运动检测,基于模型的运动检测)各有什么优缺点。不同的方法分别适合于哪些情况?
11.6试归纳并列出利用高斯混合模型计算和保持动态背景帧的主要步骤和工作。
第十五单元
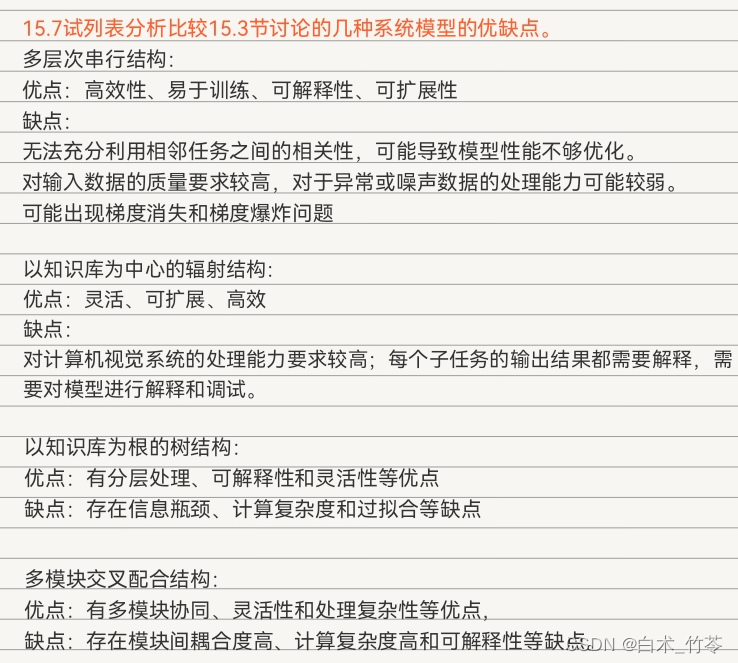
15.7试列表分析比较15.3节讨论的几种系统模型的优缺点。