标定工具源码下载:
[2205.14087] OpenCalib: A Multi-sensor Calibration Toolbox for Autonomous Driving (arxiv.org)![]() https://arxiv.org/abs/2205.14087下载完之后进行安装编译,可能会遇到一些问题,但是问题不大,网上查找应该可以解决。
https://arxiv.org/abs/2205.14087下载完之后进行安装编译,可能会遇到一些问题,但是问题不大,网上查找应该可以解决。
这里以lidar2camera的手动标定为例说明操作步骤:
1.先安装所需库
- Cmake
- opencv 2.4
- eigen 3
- PCL 1.9
- Pangolin
分别一一安装,网上有很多安装教程,安装这些一般也没问题,这里不再细说。
然后进入到/lidar2camera/manual_calib目录,执行以下命令
mkdir -p build && cd build
cmake .. && make然后运行测试样例:
cd ~./manual_calib/
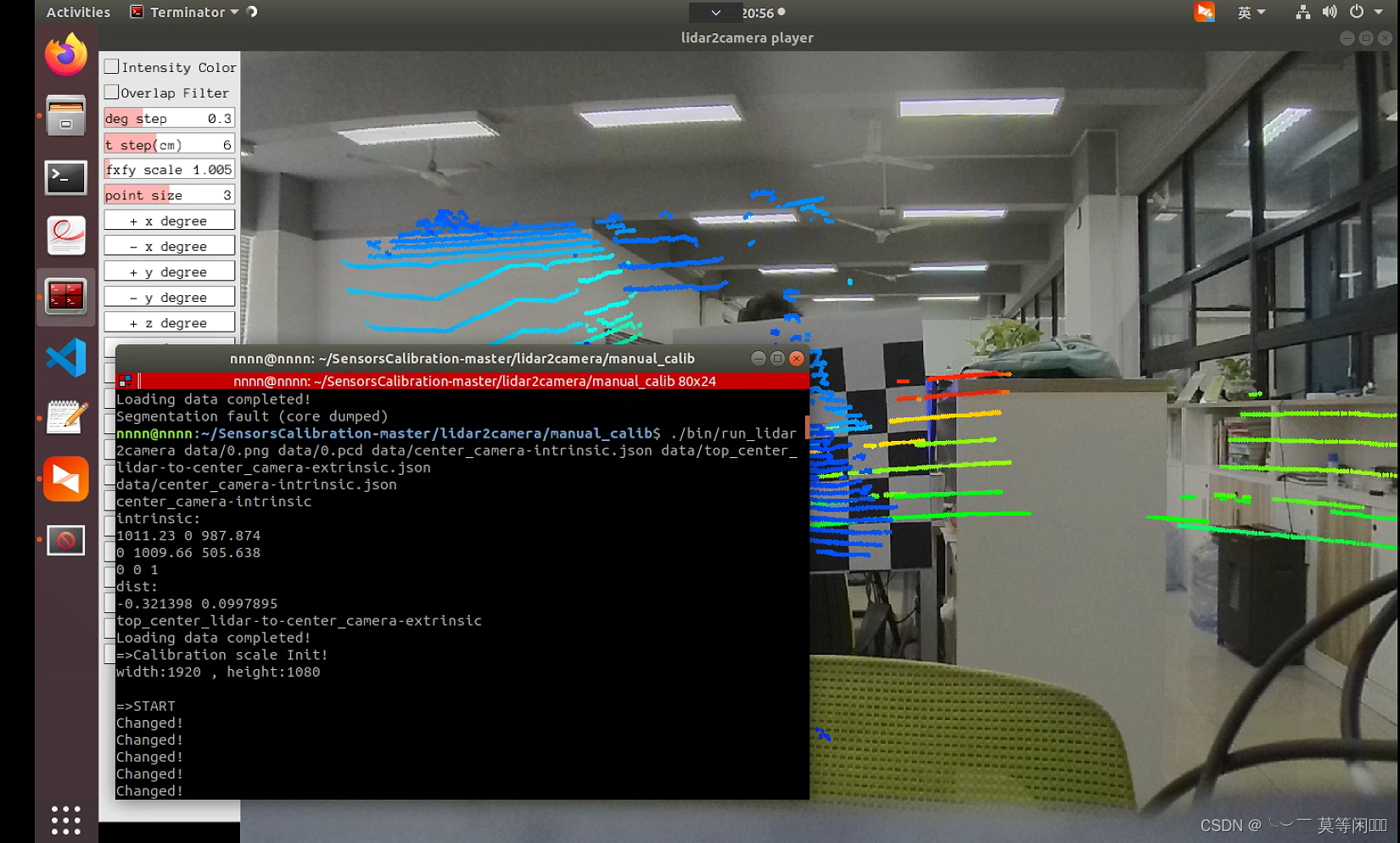
./bin/run_lidar2camera data/0.png data/0.pcd data/center_camera-intrinsic.json data/top_center_lidar-to-center_camera-extrinsic.json得到以下效果:

以上这些步骤一般问题都不大。
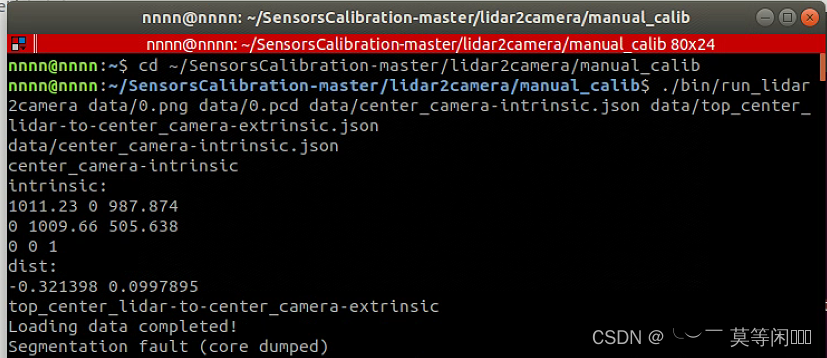
用自己的数据进行标定时可能就会出现一些问题,比如Segmentation fault(core dumped)
修改src目录下的.cpp文件,将该文件中的modification_list_[i] = tmp改为modification_list_.push_back(tmp).
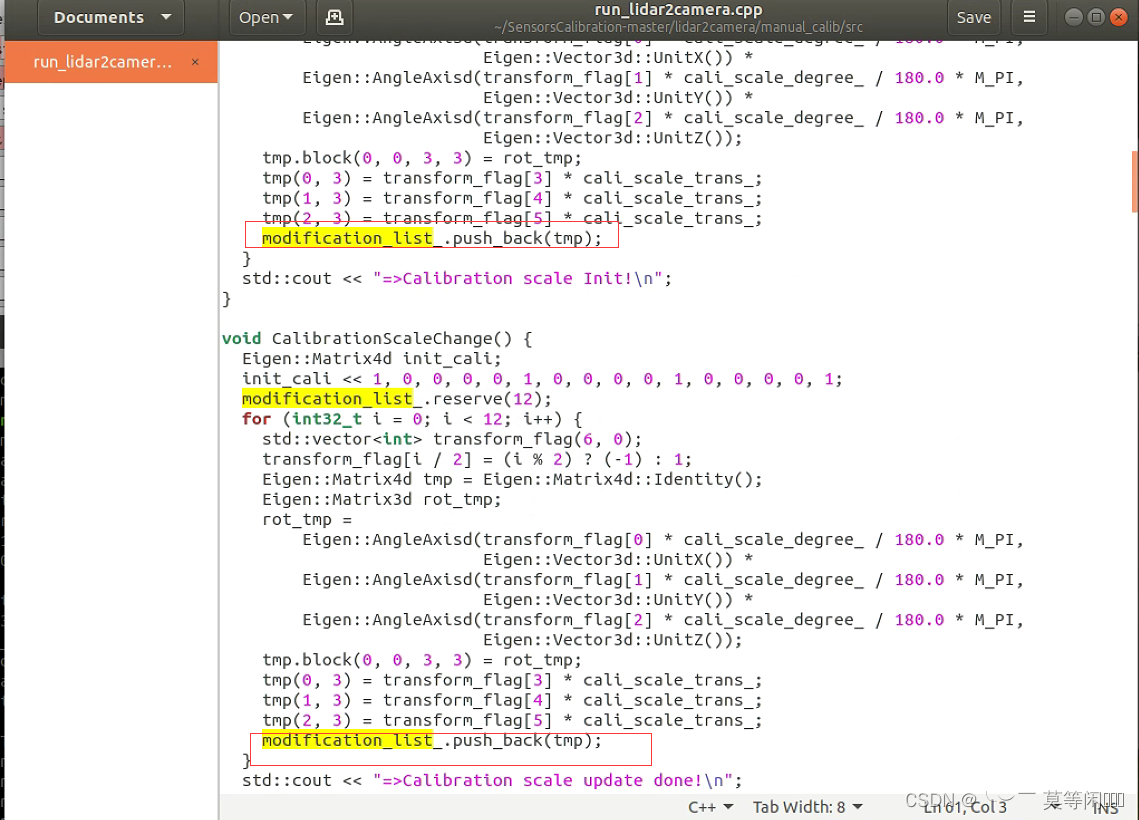
然后进入build文件夹中重新编译:
cmake .. && make
然后再运行