ORB-SLAM3 ROS 编译报错:
Failed to invoke /opt/ros/melodic/bin/rospack deps-manifests ORB_SLAM3
[rospack] Error: the rosdep view is empty: call 'sudo rosdep init' and 'rosdep update'
CMake Error at /opt/ros/melodic/share/ros/core/rosbuild/public.cmake:129 (message):
Failed to invoke rospack to get compile flags for package 'ORB_SLAM3'.
Look above for errors from rospack itself. Aborting. Please fix the
broken dependency!
即使将ROS的路径正确添加在.bashrc文件中依然报错
如图:

根据提示,说让我们 sudo rosdep init 之后rosdep update,但是会报错!
这时候,首先查看 /etc/ros/rosdep/sources.list.d/路径下有没有20-default.list这个文件,如果没有,请按以下步骤更新:(是否是使用鱼香ROS一键安装的ros都适用以下方法:)
sudo apt-get install python3-pip sudo pip3 install rosdepcsudo rosdepc init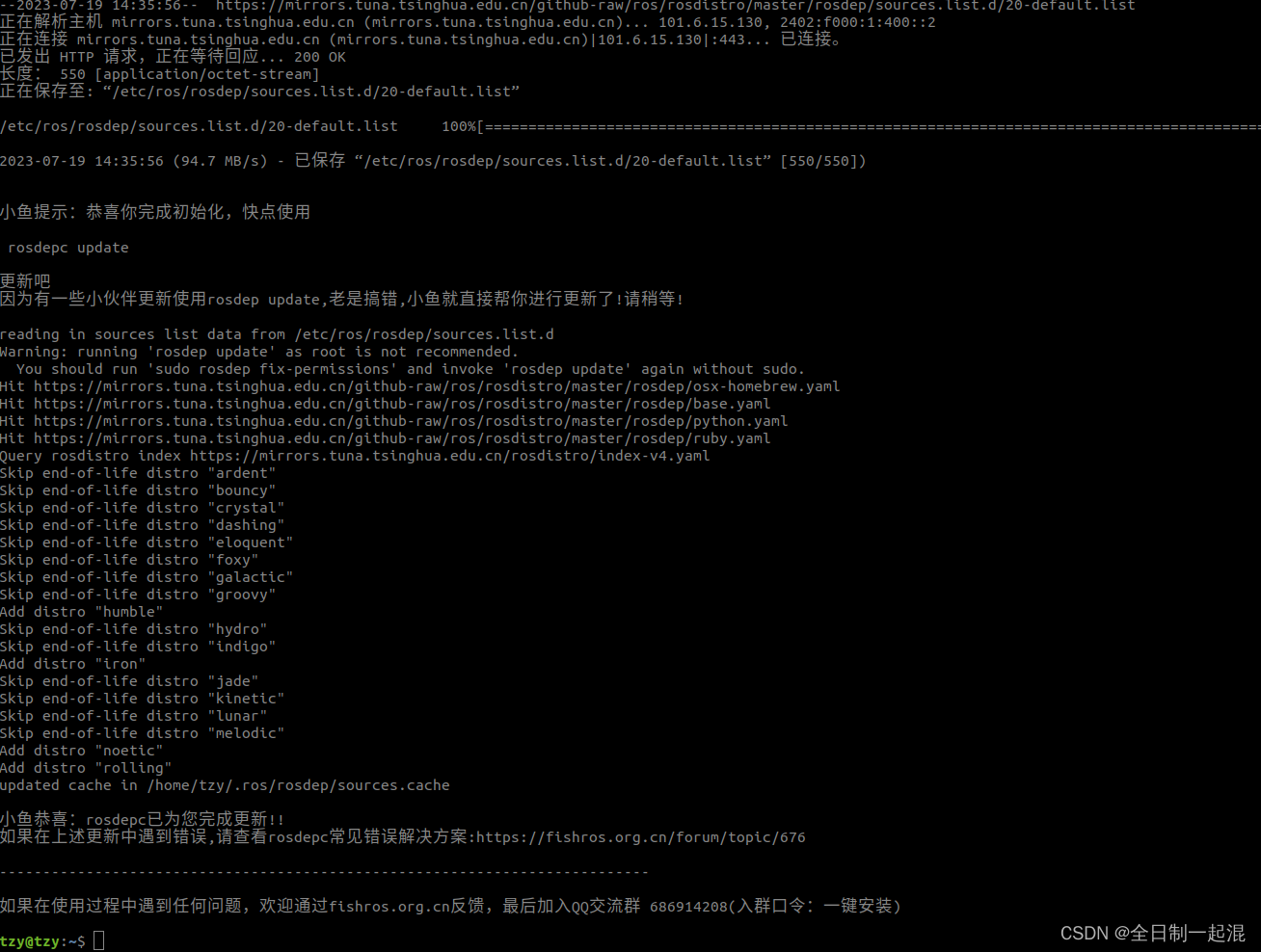
rosdepc update