要求使用protues仿真软件,来模仿实际十字路口的红绿的显示变化,同时数码管进行时间倒计时的显示。百度了下实际情况的交通灯规则如下图。
整个交通灯的运行流程如下图所示,这个应该和实际工作流程是非常接近的。
根据这些资料开始绘制protues的仿真图,一开始是完全按照实际情况来设置的,画出来的是这样的。。
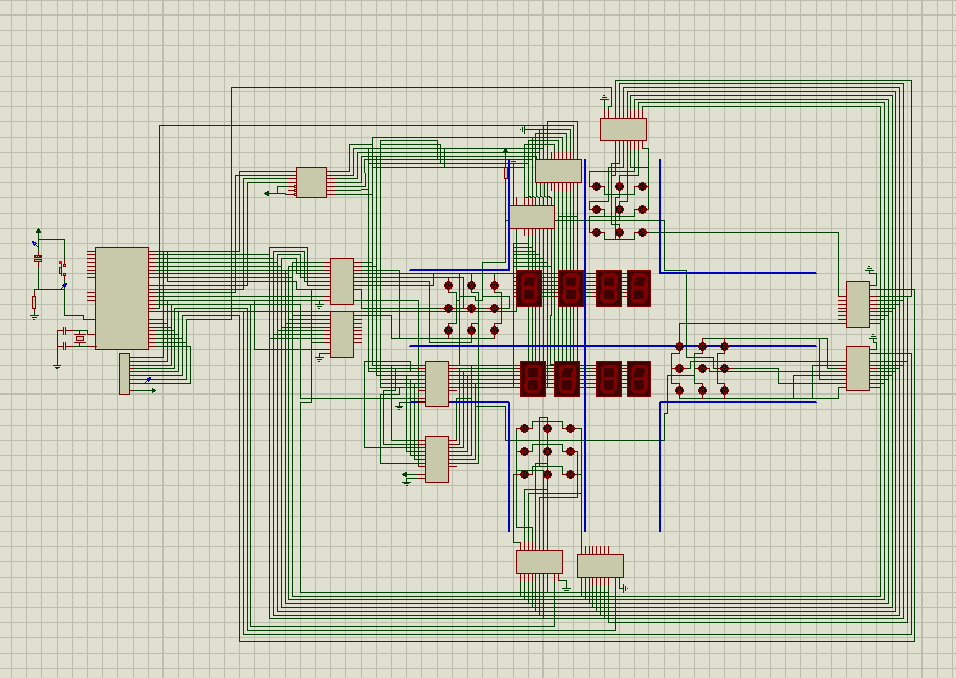
写了个测试小程序一跑,懵逼了。。出现了Simulation is not running in real time due to excessive CPU load 这条警告。当时百度了很久都没有查询到问题,所以就放弃这个电路了。(现在知道解决办法了,在我的另一篇博文中有介绍)当时没办法,只好又画了个简单点的电路,同时把这些乱七八糟的线全部变成net标号了。最终如下图所示,这个电路是不改LED属性也能跑的,当然现在我已经全改了,因为我们只需要LED有亮灭两种状态就可以了。
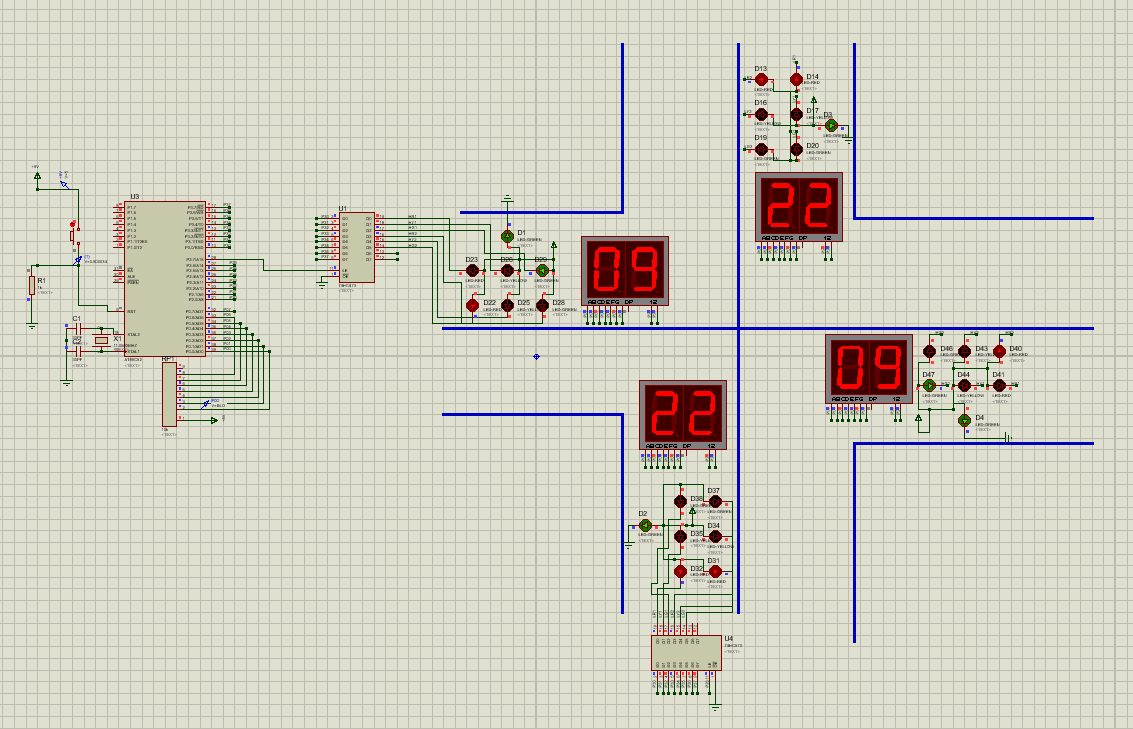
下面贴个测试的工程,适用于第二个电路(其实差不多,就是数码管这边有写不同吧。)
#include<reg51.h>
// 数据类型定义
#define u8 unsigned char
#define u16 unsigned int
// 数码管段选数组
u8 code NUM[]={0x40,0x79,0x24,0x30,0x19,0x12,0x02,0x78,0x00,0x10};
u8 time_cnt=0;
u8 turn_yellow=0;
u8 ex =1;
u8 turnflag=0;
u8 left_time;
u8 for_time;
// 管脚定义
sbit left_red = P3^0;
sbit left_yellow = P3^1;
sbit left_green = P3^2;
sbit for_red = P3^3;
sbit for_yellow = P3^4;
sbit for_green = P3^5;
sbit leftc=P2^7;
sbit forc = P2^6;
// 延时函数
void delay_us(u16 t)
{
while(t--);
}
// 定时器 50ms
void Timer_Init()
{
EA=1;
ET0=1;
TMOD=0x01;
TH0=15536/256;
TL0=15536%256;
TR0=1;
}
//前方向 黄灯亮
void foryellow()
{
forc=0;
leftc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 1;
left_yellow = 0;
left_green = 1;
leftc=0;
forc=1;
for_red=1;
for_yellow=1;
for_green=0;
left_red = 0;
left_yellow = 1;
left_green = 1;
forc=0;
}
// 左右方向 黄灯亮
void leftyellow()
{
forc=0;
leftc=1;
for_red=1;
for_yellow=1;
for_green=0;
left_red = 0;
left_yellow = 1;
left_green = 1;
leftc=0;
forc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 1;
left_yellow = 0;
left_green = 1;
forc=0;
}
//前方向转向
void forturn()
{
forc=0;
leftc=1;
for_red=1;
for_yellow=1;
for_green=0;
left_red = 0;
left_yellow = 1;
left_green = 1;
leftc=0;
forc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 0;
left_yellow = 1;
left_green = 1;
forc=0;
}
//左右方向转向
void leftturn()
{
forc=0;
leftc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 0;
left_yellow = 1;
left_green = 1;
leftc=0;
forc=1;
for_red=1;
for_yellow=1;
for_green=0;
left_red = 0;
left_yellow = 1;
left_green = 1;
forc=0;
}
//前进绿灯
void forgo()
{
forc=0;
leftc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 1;
left_yellow = 1;
left_green = 0;
leftc=0;
forc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 0;
left_yellow = 1;
left_green = 1;
forc=0;
}
//前进红灯
void forstop()
{
forc=0;
leftc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 0;
left_yellow = 1;
left_green = 1;
leftc=0;
forc=1;
for_red=0;
for_yellow=1;
for_green=1;
left_red = 1;
left_yellow = 1;
left_green = 0;
forc=0;
}
//前进方向数码管显示
void dispfor(u8 num)
{
P2|=0x0f;
P0=0xff;
P2=(P2&0xc0)|0x01;
P0=NUM[num/10];
delay_us(100);
P0=0xff;
P2|=0x0f;
P0=0xff;
P2=(P2&0xc0)|0x02;
P0=NUM[num%10];
delay_us(100);
P0=0xff;
}
//左右方向数码管显示
void displeft(u8 num)
{
P2|=0x0f;
P0=0xff;
P2=(P2&0xc0)|0x04;
P0=NUM[num/10];
delay_us(100);
P0=0xff;
P2|=0x0f;
P0=0xff;
P2=(P2&0xc0)|0x08;
P0=NUM[num%10];
delay_us(100);
P0=0xff;
}
//主函数
void main()
{
for_time=17;
left_time=30;
Timer_Init(); //初始时间
forgo();
while(1)
{
dispfor(for_time);
displeft(left_time);//显示
}
}
//定时器中断
void Timer0() interrupt 1
{
TR0=0;
time_cnt++;
if(time_cnt>19)
{
time_cnt=0;
for_time--;
left_time--;
if(for_time==0&&ex) //时间为0
{
if(turn_yellow) //是否变过黄灯
{
if(turnflag==0) //是否转向
{
for_time=10;
forturn();
turnflag=1;
}
else
{
for_time=30;
left_time=17;
forstop();
ex=0;
turnflag=0;
turn_yellow=0;
}
}
else
{
for_time=3;
foryellow();
turn_yellow=1;
}
}
if(left_time==0&&ex==0)
{
if(turn_yellow) //是否变过黄灯
{
if(turnflag==0) //是否转向
{
left_time=10;
leftturn();
turnflag=1;
}
else
{
for_time=17;
left_time=30;
forgo();
ex=0;
turnflag=0;
}
}
else
{
left_time=3;
leftyellow();
turn_yellow=1;
}
}
}
TH0=15536/256;
TL0=15536%256;
TR0=1;
}
近期在整理自己以前做的一些小工程,算是给自己留记录,同时也分享给需要的人。仿真文件大家可以按照上面的自己画,也可以在我的个人公众号“硬件君”私聊我获取。