1、 打开Axis。
(1) 首先你要点击图(2)中的第二个按钮connect,如果你的连接线已经插到电脑了,你会看到图(3),然后点connect。(第三个按钮是可以选择休眠还是断开连接。如果是休眠,蓝色灯不会关掉,再次连接的时候不用一个个按开了,直接连接就行;如果是断开连接,蓝色灯全部关掉,下次要连接要重新一个个按开。动捕全部结束后别忘了断开连接哦,不然要手动长按传感器两侧来关闭)
(2)点图(2)的第四个按钮,按照指示进行校准。


图(2) 图(3)
(3)打开File中的setting,按图(4)配置。

图(4)
2、 打开Motion Builder。
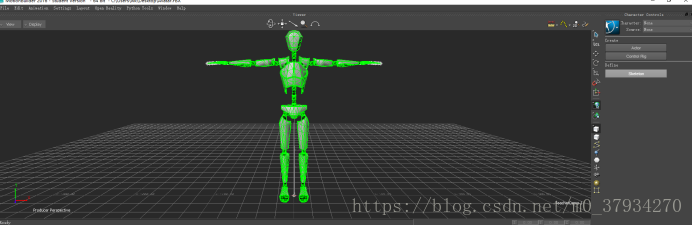
(1)open导入你骨骼已经绑定好了的模型。(骨骼可以选择官方给的标准的骨骼,然后自己绑定。命名改成和MB里标准的一样,这样匹配骨骼的时候比较方便)
(2)选中你的模型,此时右边的面板如图(5)所示。选择Control Rig,会出现图(6)所示的窗口,选择Define.
图(5)

图(6)
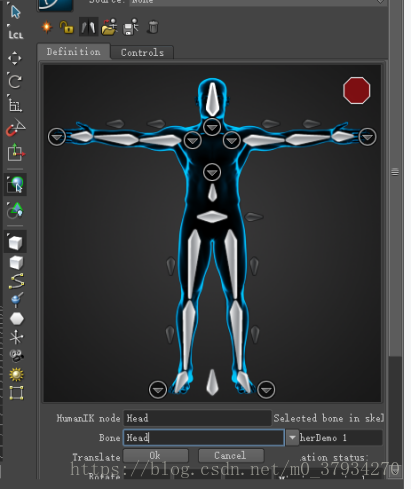
(3)右边面板会如图(7)所示。此时,你需要将你准备的模型骨骼与Motion Builder中预设的模型骨骼一一对应。根骨骼,就是两脚之间的那个,有可能你的模型没有,随便设置一个比如图(10)里的那个Robot_References就可以。

图(7)
有两种对应骨骼的方式:
①双击图中的关节,双击Bone框,填入对应的骨骼名称,回车。再双击下一个关节,填骨骼名称。
②如下图(8)(9),将motion builder的操作方式改成和maya是一样的。然后选中模型,按4会只显示骨骼。这时候你双击右边小图中的关节,再点选模型对应位置的骨骼,两两就对应上了。
图(8)
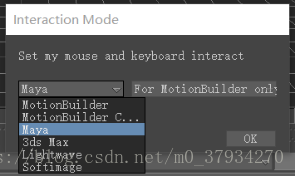
图(9)
(4)所有骨骼都匹配好之后会如图(10)所示。此时点击Source下拉菜单中的Control Rig,会弹出如图(11)的窗口,Biped是两足动物,Quadruped是四足走兽,根据需要进行创建。又弹出如图(12)的窗口,选第一个吧。
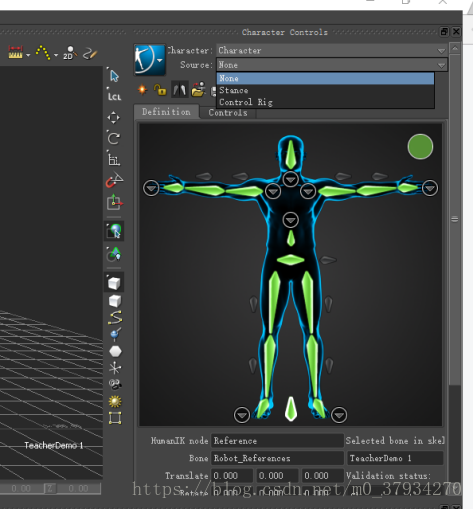
图(10)
(5)如果Axis已经安装好了的话,可以看到图(13)右下角Devices->Motion robot。按住左键把它拖拽到中间的大视图中。
(6)此时下面的面板会出现如图(14)的设置
(7)按图(15)配置。即Online点成绿色,下面两个选项都勾选上,然后在下拉菜单里选create。然后点击Characterize。
(6)右边的面板如图(16)Source下拉菜单中此时有了NoitomRobot的选项,选它!
(7)录制时间轴上的那个圆点,跳出窗口如图(17)选第一个。播放键开始录制,停止键结束录制。录制完成后File->save as保存即可。