在前面,已经将 onnx模型转为 rknn模型。
yolov5 onnx模型 转为 rknn模型_爱钓鱼的歪猴的博客-CSDN博客
这里探讨的是:rknn模型在rv1126开发板上运行
目录
rknn模型C++推理代码--yolov5_detect.h
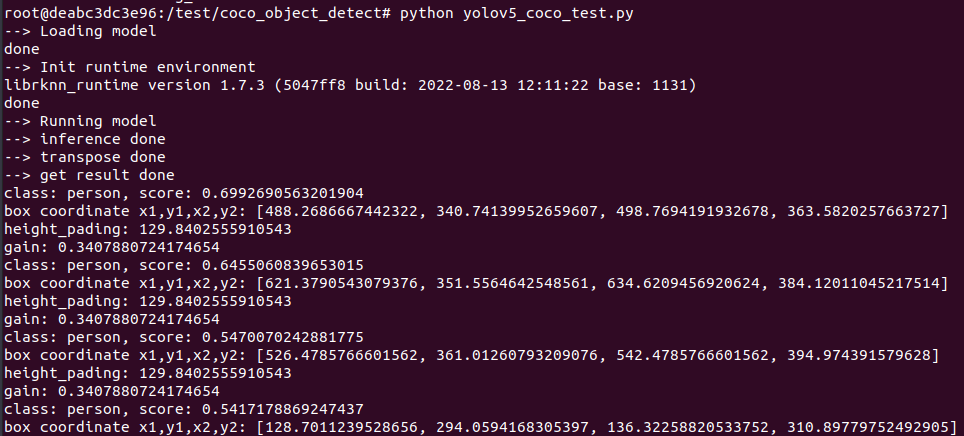
1、rknn模型在PC端进行推理测试,评估模型精度
这里是在上面那个博客的提到的docker环境,即

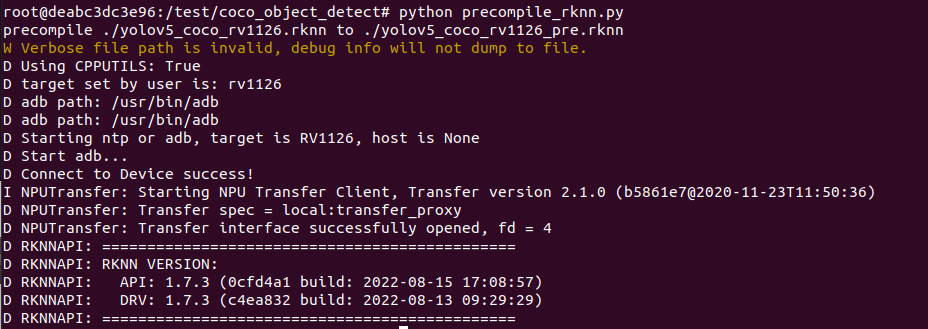
2、模型预编译
执行过第一步,可以发现rknn模型推理的时候会很慢,所以需要对模型进行预编译。预编译的时候需要经过EASY EAI Nano主板的环境,开发板与Ubuntu必须保证adb连接稳定 。
但是Ubuntu环境与docker环境对adb设备资源是竞争关系,所以需要关掉ubuntu环境的adb服务,且在docker环境通过apt-get安装adb包
在Ubuntu环境关闭adb服务:
adb kill-server在docker环境安装adb安装包:
apt-get install adb
adb service
adb devices运行precompile_rknn.py脚本把模型执行预编译
python precompile_rknn.py执行效果如下图所示,生成预编译模型yolov5_coco_rv1126_pre.rknn
3、rknn模型部署到rv1126开发板(交叉编译)
下载交叉编译环境:
网盘链接:百度网盘 请输入提取码
提取码:i1ii
记得修改 run.sh中
VOL_SRC=你存放上面文件的目录you
--user=root这样会建立you目录到镜像的映射,十分方便
下载rknn模型C++推理代码:
百度网盘链接: (百度网盘 请输入提取码 提取码:1jfb)。
解压后,在交叉环境中对其进行编译操作:
./build.sh注:
* 由于依赖库部署在板卡上,因此交叉编译过程中必须保持adb连接。
将编译好的模型部署到开发板
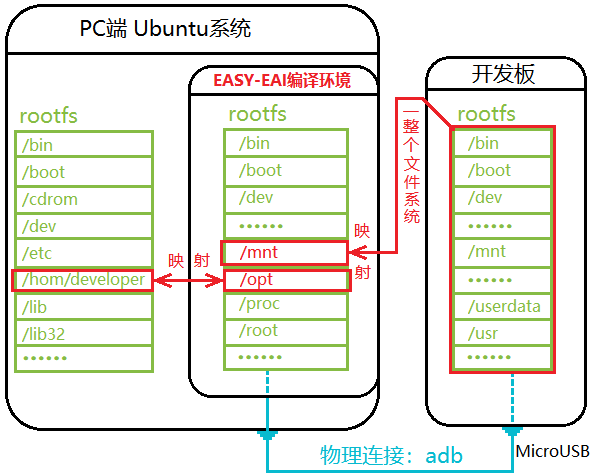
在交叉编译环境中,将编译结果复制到/mnt/userdata目录,而该目录映射到开发板
cp yolov5_detect_demo_release/ /mnt/userdata/ -rf通过按键Ctrl+Shift+T创建一个新窗口,执行adb shell命令,进入板卡运行环境:
adb shell进入板卡后,定位到例程上传的位置,如下所示:
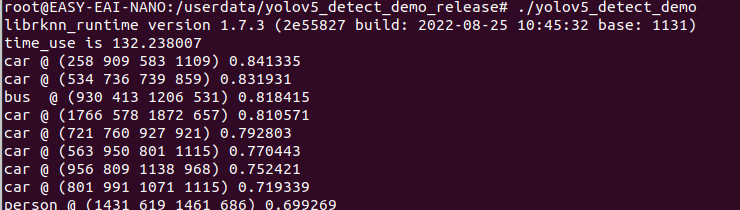
cd /userdata/yolov5_detect_demo_release/运行例程命令如下所示:
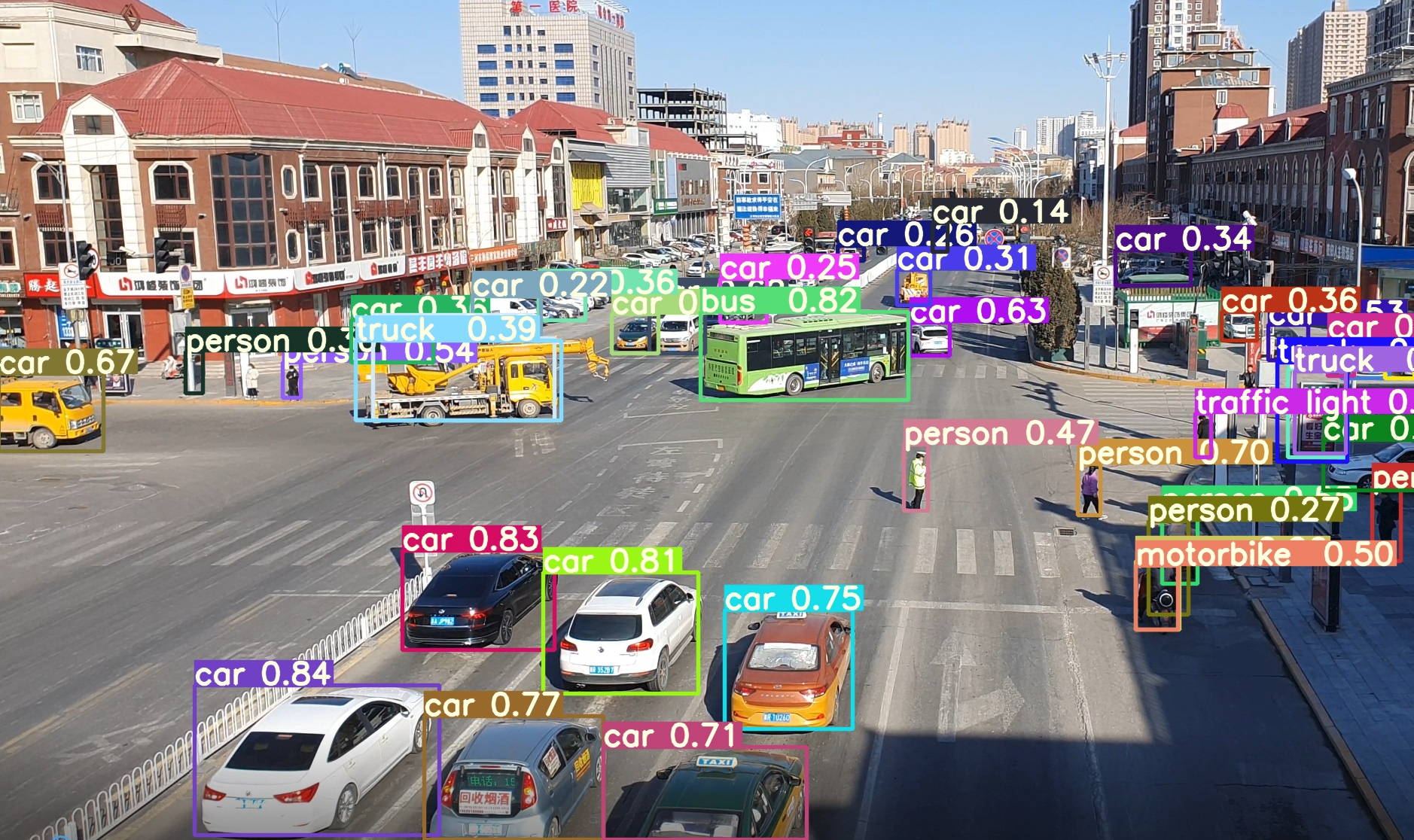
./yolov5_detect_demo执行结果如下图所示,算法执行时间约为50ms:
退出板卡环境,取回测试图片:
exit
adb pull /userdata/yolov5_detect_demo_release/result.jpg .
与onnx模型推理结果对比,rknn模型对远处的车、以及不明显的人不敏感,但是近处的物体识别效果很好与onnx模型一致!
以下是两份代码
rknn模型在PC端推理代码(python):
import os
import urllib
import traceback
import time
import sys
import numpy as np
import cv2
import random
from rknn.api import RKNN
RKNN_MODEL = 'yolov5_coco_rv1126.rknn'
IMG_PATH = './test.jpg'
DATASET = './dataset.txt'
BOX_THRESH = 0.25
NMS_THRESH = 0.6
IMG_SIZE = 640
CLASSES = ("person", "bicycle", "car","motorbike ","aeroplane ","bus ","train","truck ","boat","traffic light",
"fire hydrant","stop sign ","parking meter","bench","bird","cat","dog ","horse ","sheep","cow","elephant",
"bear","zebra ","giraffe","backpack","umbrella","handbag","tie","suitcase","frisbee","skis","snowboard","sports ball","kite",
"baseball bat","baseball glove","skateboard","surfboard","tennis racket","bottle","wine glass","cup","fork","knife",
"spoon","bowl","banana","apple","sandwich","orange","broccoli","carrot","hot dog","pizza ","donut","cake","chair","sofa",
"pottedplant","bed","diningtable","toilet ","tvmonitor","laptop","mouse","remote ","keyboard ","cell phone","microwave ",
"oven ","toaster","sink","refrigerator ","book","clock","vase","scissors ","teddy bear ","hair drier", "toothbrush")
def sigmoid(x):
return 1 / (1 + np.exp(-x))
def xywh2xyxy(x):
# Convert [x, y, w, h] to [x1, y1, x2, y2]
y = np.copy(x)
y[:, 0] = x[:, 0] - x[:, 2] / 2 # top left x
y[:, 1] = x[:, 1] - x[:, 3] / 2 # top left y
y[:, 2] = x[:, 0] + x[:, 2] / 2 # bottom right x
y[:, 3] = x[:, 1] + x[:, 3] / 2 # bottom right y
return y
def process(input, mask, anchors):
anchors = [anchors[i] for i in mask]
grid_h, grid_w = map(int, input.shape[0:2])
box_confidence = sigmoid(input[..., 4])
box_confidence = np.expand_dims(box_confidence, axis=-1)
box_class_probs = sigmoid(input[..., 5:])
box_xy = sigmoid(input[..., :2])*2 - 0.5
col = np.tile(np.arange(0, grid_w), grid_w).reshape(-1, grid_w)
row = np.tile(np.arange(0, grid_h).reshape(-1, 1), grid_h)
col = col.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)
row = row.reshape(grid_h, grid_w, 1, 1).repeat(3, axis=-2)
grid = np.concatenate((col, row), axis=-1)
box_xy += grid
box_xy *= int(IMG_SIZE/grid_h)
box_wh = pow(sigmoid(input[..., 2:4])*2, 2)
box_wh = box_wh * anchors
box = np.concatenate((box_xy, box_wh), axis=-1)
return box, box_confidence, box_class_probs
def filter_boxes(boxes, box_confidences, box_class_probs):
"""Filter boxes with box threshold. It's a bit different with origin yolov5 post process!
# Arguments
boxes: ndarray, boxes of objects.
box_confidences: ndarray, confidences of objects.
box_class_probs: ndarray, class_probs of objects.
# Returns
boxes: ndarray, filtered boxes.
classes: ndarray, classes for boxes.
scores: ndarray, scores for boxes.
"""
box_scores = box_confidences * box_class_probs
box_classes = np.argmax(box_class_probs, axis=-1)
box_class_scores = np.max(box_scores, axis=-1)
pos = np.where(box_confidences[...,0] >= BOX_THRESH)
boxes = boxes[pos]
classes = box_classes[pos]
scores = box_class_scores[pos]
return boxes, classes, scores
def nms_boxes(boxes, scores):
"""Suppress non-maximal boxes.
# Arguments
boxes: ndarray, boxes of objects.
scores: ndarray, scores of objects.
# Returns
keep: ndarray, index of effective boxes.
"""
x = boxes[:, 0]
y = boxes[:, 1]
w = boxes[:, 2] - boxes[:, 0]
h = boxes[:, 3] - boxes[:, 1]
areas = w * h
order = scores.argsort()[::-1]
keep = []
while order.size > 0:
i = order[0]
keep.append(i)
xx1 = np.maximum(x[i], x[order[1:]])
yy1 = np.maximum(y[i], y[order[1:]])
xx2 = np.minimum(x[i] + w[i], x[order[1:]] + w[order[1:]])
yy2 = np.minimum(y[i] + h[i], y[order[1:]] + h[order[1:]])
w1 = np.maximum(0.0, xx2 - xx1 + 0.00001)
h1 = np.maximum(0.0, yy2 - yy1 + 0.00001)
inter = w1 * h1
ovr = inter / (areas[i] + areas[order[1:]] - inter)
inds = np.where(ovr <= NMS_THRESH)[0]
order = order[inds + 1]
keep = np.array(keep)
return keep
def yolov5_post_process(input_data):
masks = [[0, 1, 2], [3, 4, 5], [6, 7, 8]]
anchors = [[10, 13], [16, 30], [33, 23], [30, 61], [62, 45],
[59, 119], [116, 90], [156, 198], [373, 326]]
boxes, classes, scores = [], [], []
for input,mask in zip(input_data, masks):
b, c, s = process(input, mask, anchors)
b, c, s = filter_boxes(b, c, s)
boxes.append(b)
classes.append(c)
scores.append(s)
boxes = np.concatenate(boxes)
boxes = xywh2xyxy(boxes)
classes = np.concatenate(classes)
scores = np.concatenate(scores)
nboxes, nclasses, nscores = [], [], []
for c in set(classes):
inds = np.where(classes == c)
b = boxes[inds]
c = classes[inds]
s = scores[inds]
keep = nms_boxes(b, s)
nboxes.append(b[keep])
nclasses.append(c[keep])
nscores.append(s[keep])
if not nclasses and not nscores:
return None, None, None
boxes = np.concatenate(nboxes)
classes = np.concatenate(nclasses)
scores = np.concatenate(nscores)
return boxes, classes, scores
def scale_coords(x1, y1, x2, y2, dst_width, dst_height):
dst_top, dst_left, dst_right, dst_bottom = 0, 0, 0, 0
gain = 0
if dst_width > dst_height:
image_max_len = dst_width
gain = IMG_SIZE / image_max_len
resized_height = dst_height * gain
height_pading = (IMG_SIZE - resized_height)/2
print("height_pading:", height_pading)
y1 = (y1 - height_pading)
y2 = (y2 - height_pading)
print("gain:", gain)
dst_x1 = int(x1 / gain)
dst_y1 = int(y1 / gain)
dst_x2 = int(x2 / gain)
dst_y2 = int(y2 / gain)
return dst_x1, dst_y1, dst_x2, dst_y2
def plot_one_box(x, img, color=None, label=None, line_thickness=None):
tl = line_thickness or round(0.002 * (img.shape[0] + img.shape[1]) / 2) + 1 # line/font thickness
color = color or [random.randint(0, 255) for _ in range(3)]
c1, c2 = (int(x[0]), int(x[1])), (int(x[2]), int(x[3]))
cv2.rectangle(img, c1, c2, color, thickness=tl, lineType=cv2.LINE_AA)
if label:
tf = max(tl - 1, 1) # font thickness
t_size = cv2.getTextSize(label, 0, fontScale=tl / 3, thickness=tf)[0]
c2 = c1[0] + t_size[0], c1[1] - t_size[1] - 3
cv2.rectangle(img, c1, c2, color, -1, cv2.LINE_AA) # filled
cv2.putText(img, label, (c1[0], c1[1] - 2), 0, tl / 3, [225, 255, 255], thickness=tf, lineType=cv2.LINE_AA)
def draw(image, boxes, scores, classes):
"""Draw the boxes on the image.
# Argument:
image: original image.
boxes: ndarray, boxes of objects.
classes: ndarray, classes of objects.
scores: ndarray, scores of objects.
all_classes: all classes name.
"""
for box, score, cl in zip(boxes, scores, classes):
x1, y1, x2, y2 = box
print('class: {}, score: {}'.format(CLASSES[cl], score))
print('box coordinate x1,y1,x2,y2: [{}, {}, {}, {}]'.format(x1, y1, x2, y2))
x1 = int(x1)
y1 = int(y1)
x2 = int(x2)
y2 = int(y2)
dst_x1, dst_y1, dst_x2, dst_y2 = scale_coords(x1, y1, x2, y2, image.shape[1], image.shape[0])
#print("img.cols:", image.cols)
plot_one_box((dst_x1, dst_y1, dst_x2, dst_y2), image, label='{0} {1:.2f}'.format(CLASSES[cl], score))
'''
cv2.rectangle(image, (dst_x1, dst_y1), (dst_x2, dst_y2), (255, 0, 0), 2)
cv2.putText(image, '{0} {1:.2f}'.format(CLASSES[cl], score),
(dst_x1, dst_y1 - 6),
cv2.FONT_HERSHEY_SIMPLEX,
0.6, (0, 0, 255), 2)
'''
def letterbox(im, new_shape=(640, 640), color=(0, 0, 0)):
# Resize and pad image while meeting stride-multiple constraints
shape = im.shape[:2] # current shape [height, width]
if isinstance(new_shape, int):
new_shape = (new_shape, new_shape)
# Scale ratio (new / old)
r = min(new_shape[0] / shape[0], new_shape[1] / shape[1])
# Compute padding
ratio = r, r # width, height ratios
new_unpad = int(round(shape[1] * r)), int(round(shape[0] * r))
dw, dh = new_shape[1] - new_unpad[0], new_shape[0] - new_unpad[1] # wh padding
dw /= 2 # divide padding into 2 sides
dh /= 2
if shape[::-1] != new_unpad: # resize
im = cv2.resize(im, new_unpad, interpolation=cv2.INTER_LINEAR)
top, bottom = int(round(dh - 0.1)), int(round(dh + 0.1))
left, right = int(round(dw - 0.1)), int(round(dw + 0.1))
im = cv2.copyMakeBorder(im, top, bottom, left, right, cv2.BORDER_CONSTANT, value=color) # add border
return im, ratio, (dw, dh)
if __name__ == '__main__':
# Create RKNN object
rknn = RKNN()
print('--> Loading model')
ret = rknn.load_rknn(RKNN_MODEL)
if ret != 0:
print('load rknn model failed')
exit(ret)
print('done')
# init runtime environment
print('--> Init runtime environment')
ret = rknn.init_runtime()
# ret = rknn.init_runtime('rv1126', device_id='1126')
if ret != 0:
print('Init runtime environment failed')
exit(ret)
print('done')
# Set inputs
img = cv2.imread(IMG_PATH)
letter_img, ratio, (dw, dh) = letterbox(img, new_shape=(IMG_SIZE, IMG_SIZE))
letter_img = cv2.cvtColor(letter_img, cv2.COLOR_BGR2RGB)
# Inference
print('--> Running model')
outputs = rknn.inference(inputs=[letter_img])
print('--> inference done')
# post process
input0_data = outputs[0]
input1_data = outputs[1]
input2_data = outputs[2]
input0_data = input0_data.reshape([3,-1]+list(input0_data.shape[-2:]))
input1_data = input1_data.reshape([3,-1]+list(input1_data.shape[-2:]))
input2_data = input2_data.reshape([3,-1]+list(input2_data.shape[-2:]))
input_data = list()
input_data.append(np.transpose(input0_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input1_data, (2, 3, 0, 1)))
input_data.append(np.transpose(input2_data, (2, 3, 0, 1)))
print('--> transpose done')
boxes, classes, scores = yolov5_post_process(input_data)
print('--> get result done')
img_1 = cv2.cvtColor(img, cv2.COLOR_RGB2BGR)
if boxes is not None:
draw(img, boxes, scores, classes)
cv2.imwrite('./result.jpg', img)
cv2.imshow("post process result", img_1)
cv2.waitKeyEx(0)
rknn.release()
rknn模型预编译代码(Python):
import sys
import random
import os
import argparse
from rknn.api import RKNN
def precompile_file(fi, fo, target):
print("precompile {} to {}".format(fi, fo))
src_rknn_model_path = fi
dst_rknn_model_path = fo
rknn = RKNN(verbose=True)
rknn.load_rknn(src_rknn_model_path)
rknn.init_runtime(rknn2precompile=True, target=target)
rknn.export_rknn_precompile_model(export_path=dst_rknn_model_path)
def precompile_dir(d, out_dir, target):
"""
decrypt a directory assigned by <d>
"""
file_list = os.listdir(d)
file_count = len(file_list)
for i in range(file_count):
f = os.path.join(d, file_list[i])
target_file_name = file_list[i]
neof = os.path.join(out_dir, target_file_name)
precompile_file(f, neof, target)
print('Progress:%d/%d' % (i + 1, file_count))
print('Directory <%s> has been decrypted.' % (d))
if __name__ == '__main__':
precompile_file('./yolov5_coco_rv1126.rknn','./yolov5_coco_rv1126_pre.rknn', 'rv1126')
rknn模型C++推理代码--yolov5_detect.h
#ifndef _YOLOV5_DETECT_H_
#define _YOLOV5_DETECT_H_
#include "yolov5_detect_postprocess.h"
#include "rknn_api.h"
#include <opencv2/opencv.hpp>
/*
* COCO检测初始化函数
* ctx:输入参数,rknn_context句柄
* path:输入参数,算法模型路径
*/
int coco_detect_init(rknn_context *ctx, const char * path);
/*
* COCO检测执行函数
* ctx:输入参数,rknn_context句柄
* input_image:输入参数,图像数据输入(cv::Mat是Opencv的类型)
* output_dets:输出参数,目标检测框输出
*/
int coco_detect_run(rknn_context ctx, cv::Mat input_image, coco_detect_result_group_t *detect_result_group);
/*
* COCO检测释放函数
* ctx:输入参数,rknn_context句柄
*/
int coco_detect_release(rknn_context ctx);
#endifyolov5_detect.cpp
#include <iostream>
#include <fstream>
#include <vector>
#include <cstdint>
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <unistd.h>
#include <time.h>
#include <math.h>
#include <fcntl.h>
#include <opencv2/opencv.hpp>
#include "yolov5_detect.h"
#include "rknn_api.h"
#include <sys/time.h>
using namespace std;
using namespace cv;
//unsigned char *model;
//detection* dets;
static void printRKNNTensor(rknn_tensor_attr *attr)
{
printf("index=%d name=%s n_dims=%d dims=[%d %d %d %d] n_elems=%d size=%d "
"fmt=%d type=%d qnt_type=%d fl=%d zp=%d scale=%f\n",
attr->index, attr->name, attr->n_dims, attr->dims[3], attr->dims[2],
attr->dims[1], attr->dims[0], attr->n_elems, attr->size, 0, attr->type,
attr->qnt_type, attr->fl, attr->zp, attr->scale);
}
// 调整图片尺寸达到模型输入尺寸要求
static int letter_box(cv::Mat input_image, cv::Mat *output_image, int model_input_size)
{
// 计算缩放比
int input_width, input_height;
input_width = input_image.cols;
input_height = input_image.rows;
float ratio;
ratio = min((float)model_input_size / input_width, (float)model_input_size / input_height); // 选择较小的缩放比
// 计算缩放后的宽高尺寸
int new_width, new_height;
new_width = round(ratio * input_width );
new_height = round(ratio * input_height);
// 计算padding量
// 长或者宽,至少有一个在缩放后满足模型需求了;另一个需要padding
int height_padding = 0;
int width_padding = 0;
int top = 0;
int bottom = 0;
int left = 0;
int right = 0;
if( new_width >= new_height) // 宽已经满足要求了,高需要padding
{
height_padding = new_width - new_height; // 计算padding量
if( (height_padding % 2) == 0 ) // 如果padding量是偶数
{
top = (int)((float)(height_padding/2)); // 直接除2就好
bottom = (int)((float)(height_padding/2));
}
else // padding量是奇数
{
top = (int)((float)(height_padding/2));
bottom = (int)((float)(height_padding/2))+1;
}
}
else // 高已经满足要求了,宽需要padding
{
width_padding = new_height - new_width;
if( (width_padding % 2) == 0 )
{
left = (int)((float)(width_padding/2));
right = (int)((float)(width_padding/2));
}
else
{
left = (int)((float)(width_padding/2));
right = (int)((float)(width_padding/2))+1;
}
}
// 对长宽进行缩放
cv::Mat resize_img;
cv::resize(input_image, resize_img, cv::Size(new_width, new_height));
// padding操作
cv::copyMakeBorder(resize_img, *output_image, top, bottom, left, right, cv::BORDER_CONSTANT, cv::Scalar(0, 0, 0));
return 0;
}
// 模型为二进制格式存储,将其整个加载到内存中
int coco_detect_init(rknn_context *ctx, const char * path)
{
int ret;
// Load model
FILE *fp = fopen(path, "rb"); // 打开指定路径的模型文件
if(fp == NULL)
{
printf("fopen %s fail!\n", path);
return -1;
}
fseek(fp, 0, SEEK_END); // SEEK_EN为文件尾,文件指针移向文件的末尾
int model_len = ftell(fp); // 计算得到文件指针的偏移量
unsigned char *model_data = (unsigned char*)malloc(model_len); // 分配与模型文件长度相等的内存块,用于存储模型数据
fseek(fp, 0, SEEK_SET); //SEEK_SET为文件头,文件指针重新移动到文件开头
if(model_len != fread(model_data, 1, model_len, fp)) // 将模型文件中的数据读取到之前分配的内存块; 如果读取的数据长度与模型文件长度不一致,则
{
printf("fread %s fail!\n", path);
free(model_data); // 释放内存块
return -1;
}
fclose(fp); // 关闭文件
//init
ret = rknn_init(ctx, model_data, model_len, RKNN_FLAG_PRIOR_MEDIUM); // 初始化rknn模型上下文
if(ret < 0)
{
printf("rknn_init fail! ret=%d\n", ret);
return -1;
}
free(model_data);
return 0;
}
// 目标框的坐标信息映射到原图上
static int scale_coords(coco_detect_result_group_t *detect_result_group, int img_width, int img_height, int model_size)
{
for (int i = 0; i < detect_result_group->count; i++)
{
coco_detect_result_t *det_result = &(detect_result_group->results[i]);
int x1 = det_result->box.left;
int y1 = det_result->box.top;
int x2 = det_result->box.right;
int y2 = det_result->box.bottom;
if( img_width >= img_height )
{
int image_max_len = img_width;
float gain;
gain = (float)model_size / image_max_len;
int resized_height = img_height * gain;
int height_pading = (model_size - resized_height)/2;
y1 = (y1 - height_pading);
y2 = (y2 - height_pading);
x1 = int(x1 / gain);
y1 = int(y1 / gain);
x2 = int(x2 / gain);
y2 = int(y2 / gain);
det_result->box.left = x1;
det_result->box.top = y1;
det_result->box.right = x2;
det_result->box.bottom = y2;
}
else
{
int image_max_len = img_height;
float gain;
gain = (float)model_size / image_max_len;
int resized_width = img_width * gain;
int width_pading = (model_size - resized_width)/2;
x1 = (x1 - width_pading);
x2 = (x2 - width_pading);
x1 = int(x1 / gain);
y1 = int(y1 / gain);
x2 = int(x2 / gain);
y2 = int(y2 / gain);
det_result->box.left = x1;
det_result->box.top = y1;
det_result->box.right = x2;
det_result->box.bottom = y2;
}
}
return 0;
}
int coco_detect_run(rknn_context ctx, cv::Mat input_image, coco_detect_result_group_t *detect_result_group)
{
int img_width = 0;
int img_height = 0;
int img_channel = 0;
size_t actual_size = 0;
const float vis_threshold = 0.1;
const float nms_threshold = 0.5;
const float conf_threshold = 0.2;
int ret;
img_width = input_image.cols;
img_height = input_image.rows;
// 查询SDK版本、模型输入输出张量数量
rknn_sdk_version version;
ret = rknn_query(ctx, RKNN_QUERY_SDK_VERSION, &version,
sizeof(rknn_sdk_version)); // 查询SDK版本
if (ret < 0)
{
printf("rknn_init error ret=%d\n", ret);
return -1;
}
/*
printf("sdk version: %s driver version: %s\n", version.api_version,
version.drv_version);
*/
// 查询并保存输入和输出张量属性
rknn_input_output_num io_num; // 用于存储查询到的输入和输出张量数量
ret = rknn_query(ctx, RKNN_QUERY_IN_OUT_NUM, &io_num, sizeof(io_num)); // 查询模型输入输出张量数量
if (ret < 0)
{
printf("rknn_init error ret=%d\n", ret);
return -1;
}
/*
printf("model input num: %d, output num: %d\n", io_num.n_input,
io_num.n_output);
*/
rknn_tensor_attr input_attrs[io_num.n_input]; // 创建一个数组,用于存储输入张量的属性信息
memset(input_attrs, 0, sizeof(input_attrs)); // 将数组的所有元素清零
for (int i = 0; i < io_num.n_input; i++)
{
input_attrs[i].index = i;
ret = rknn_query(ctx, RKNN_QUERY_INPUT_ATTR, &(input_attrs[i]),
sizeof(rknn_tensor_attr)); // 查询模型的输入张量属性,并保存在相应的结构体中
// 包括 索引(index)、数据格式(fmt)、数据类型(type)、通道数(channel)、宽度(dims[0])和高度(dims[1])
if (ret < 0)
{
printf("rknn_init error ret=%d\n", ret);
return -1;
}
//printRKNNTensor(&(input_attrs[i]));
}
rknn_tensor_attr output_attrs[io_num.n_output];
memset(output_attrs, 0, sizeof(output_attrs));
for (int i = 0; i < io_num.n_output; i++)
{
output_attrs[i].index = i;
ret = rknn_query(ctx, RKNN_QUERY_OUTPUT_ATTR, &(output_attrs[i]),
sizeof(rknn_tensor_attr));
//printRKNNTensor(&(output_attrs[i]));
}
// 从输入张量属性中获取输入的高和宽
int input_channel = 3;
int input_width = 0;
int input_height = 0;
if (input_attrs[0].fmt == RKNN_TENSOR_NCHW) // 检查图片通道顺序
{
//printf("model is NCHW input fmt\n");
input_width = input_attrs[0].dims[0];
input_height = input_attrs[0].dims[1];
}
else
{
//printf("model is NHWC input fmt\n");
input_width = input_attrs[0].dims[1];
input_height = input_attrs[0].dims[2];
}
/*
printf("model input height=%d, width=%d, channel=%d\n", height, width,
channel);
*/
// 输入张量初始化
/* Init input tensor */
rknn_input inputs[1];
memset(inputs, 0, sizeof(inputs));
inputs[0].index = 0;
inputs[0].type = RKNN_TENSOR_UINT8;
inputs[0].size = input_width * input_height * input_channel;
inputs[0].fmt = RKNN_TENSOR_NHWC;
inputs[0].pass_through = 0;
// 输出张量初始化
/* Init output tensor */
rknn_output outputs[io_num.n_output];
memset(outputs, 0, sizeof(outputs));
for (int i = 0; i < io_num.n_output; i++)
{
outputs[i].want_float = 0; // 输出张量的数据类型不需要转换为浮点数
}
// 对输入图像进行信封处理,将其调整为模型制定的输入尺寸
cv::Mat letter_image;
letter_box(input_image, &letter_image, input_width);
inputs[0].buf = letter_image.data; // 预处理后的图像数据赋值给inputs[0].buf
// 推理,获取模型输出
rknn_inputs_set(ctx, io_num.n_input, inputs); //输入张量与ctx(RKNN模型上下文)关联起来
ret = rknn_run(ctx, NULL); // 运行 RKNN 模型进行推理。此时模型会根据输入张量的数据进行前向传播,生成模型的输出结果
ret = rknn_outputs_get(ctx, io_num.n_output, outputs, NULL); // 获取模型的输出结果; io_num.n_output表示输出张量的数量;outputs是输出张量数组
// Post process
// 获取模型输出的缩放因子和零点信息,用于后处理
// 缩放因子是模型量化过程中得到的,会使用缩放因子和零点来确定如何将浮点数映射到整数范围内。
// 缩放因子表示浮点数在量化后,映射到整数范围内所需的缩放比例;
// 零点表示浮点数映射到整数范围内时的偏移量
std::vector<float> out_scales; // 用于存储张量的缩放因子
std::vector<uint8_t> out_zps; // 用于存储张量的零点
for (int i = 0; i < io_num.n_output; ++i)
{
out_scales.push_back(output_attrs[i].scale); // 获取第i个输出张量的缩放因子;
out_zps.push_back(output_attrs[i].zp); // 获取第i个输出张量的零点
}
// 后处理
yolov5_post_process_u8((uint8_t *)outputs[0].buf, (uint8_t *)outputs[1].buf, (uint8_t *)outputs[2].buf, input_height, input_width,
conf_threshold, nms_threshold, out_zps, out_scales, detect_result_group);
/*
yolov5_post_process_fp((float *)outputs[0].buf, (float *)outputs[1].buf, (float *)outputs[2].buf, input_height, input_width,
conf_threshold, nms_threshold, &detect_result_group);
*/
// 释放模型输出资源
rknn_outputs_release(ctx, io_num.n_output, outputs);
// 对后处理得到的目标框进行缩放,以适应原始图像的尺寸
scale_coords(detect_result_group, img_width, img_height, input_width);
return 0;
}
int coco_detect_release(rknn_context ctx)
{
rknn_destroy(ctx);
return 0;
}
yolov5_detect_postprocess.h
#ifndef _YOLOV5_DETECT_POSTPROCESS_H_
#define _YOLOV5_DETECT_POSTPROCESS_H_
#include <stdint.h>
#define COCO_NAME_MAX_SIZE 16
#define COCO_NUMB_MAX_SIZE 200
#define COCO_CLASS_NUM 80
#define COCO_PROP_BOX_SIZE (5+COCO_CLASS_NUM)
typedef struct _COCO_BOX_RECT
{
int left;
int right;
int top;
int bottom;
} COCO_BOX_RECT;
typedef struct __coco_detect_result_t
{
char name[COCO_NAME_MAX_SIZE];
int class_index;
COCO_BOX_RECT box;
float prop;
} coco_detect_result_t;
typedef struct _detect_result_group_t
{
int id;
int count;
coco_detect_result_t results[COCO_NUMB_MAX_SIZE];
} coco_detect_result_group_t;
int yolov5_post_process_u8(uint8_t *input0, uint8_t *input1, uint8_t *input2, int model_in_h, int model_in_w,
float conf_threshold, float nms_threshold,
std::vector<uint8_t> &qnt_zps, std::vector<float> &qnt_scales,
coco_detect_result_group_t *group);
int yolov5_post_process_fp(float *input0, float *input1, float *input2, int model_in_h, int model_in_w,
float conf_threshold, float nms_threshold,
coco_detect_result_group_t *group);
#endif //_RKNN_ZERO_COPY_DEMO_POSTPROCESS_H_yolov5_detect_postprocess.cpp
// Copyright (c) 2021 by Rockchip Electronics Co., Ltd. All Rights Reserved.
//
// Licensed under the Apache License, Version 2.0 (the "License");
// you may not use this file except in compliance with the License.
// You may obtain a copy of the License at
//
// http://www.apache.org/licenses/LICENSE-2.0
//
// Unless required by applicable law or agreed to in writing, software
// distributed under the License is distributed on an "AS IS" BASIS,
// WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
// See the License for the specific language governing permissions and
// limitations under the License.
#include <stdio.h>
#include <stdlib.h>
#include <math.h>
#include <string.h>
#include <sys/time.h>
#include <vector>
#include "yolov5_detect_postprocess.h"
#include <stdint.h>
static char labels[COCO_CLASS_NUM][30] = {"person", "bicycle", "car","motorbike ","aeroplane ","bus ","train","truck ","boat","traffic light",
"fire hydrant","stop sign ","parking meter","bench","bird","cat","dog ","horse ","sheep","cow","elephant",
"bear","zebra ","giraffe","backpack","umbrella","handbag","tie","suitcase","frisbee","skis","snowboard","sports ball","kite",
"baseball bat","baseball glove","skateboard","surfboard","tennis racket","bottle","wine glass","cup","fork","knife",
"spoon","bowl","banana","apple","sandwich","orange","broccoli","carrot","hot dog","pizza ","donut","cake","chair","sofa",
"pottedplant","bed","diningtable","toilet ","tvmonitor","laptop","mouse","remote ","keyboard ","cell phone","microwave ",
"oven ","toaster","sink","refrigerator ","book","clock","vase","scissors ","teddy bear ","hair drier", "toothbrush"};
const int anchor0[6] = {10, 13, 16, 30, 33, 23};
const int anchor1[6] = {30, 61, 62, 45, 59, 119};
const int anchor2[6] = {116, 90, 156, 198, 373, 326};
// 将一个浮点数val限制在一个指定的最小值min和最大值max的范围内
inline static int clamp(float val, int min, int max)
{
return val > min ? (val < max ? val : max) : min;
}
// 计算两个矩形的重叠度
// 在计算之前需要对x轴进行排序,左边那个矩形是0,右边那个是1
// yolov5输出结果,检测框已经经过排序处理,按照从左到右,从上到下的顺序排列
static float CalculateOverlap(float xmin0, float ymin0, float xmax0, float ymax0, float xmin1, float ymin1, float xmax1, float ymax1)
{
float w = fmax(0.f, fmin(xmax0, xmax1) - fmax(xmin0, xmin1) + 1.0); // 重叠部分的宽
float h = fmax(0.f, fmin(ymax0, ymax1) - fmax(ymin0, ymin1) + 1.0); // 重叠部分的高
float i = w * h; // 重叠部分的面积,即两矩形交集
float u = (xmax0 - xmin0 + 1.0) * (ymax0 - ymin0 + 1.0) + (xmax1 - xmin1 + 1.0) * (ymax1 - ymin1 + 1.0) - i; // 两矩形并集面积
return u <= 0.f ? 0.f : (i / u); // 交并比
}
//
static int nms(int validCount, std::vector<float> &outputLocations, std::vector<int> &order, float threshold)
{
for (int i = 0; i < validCount; ++i) // 遍历所有检测框
{
if (order[i] == -1)
{
continue;
}
int n = order[i]; // 检测框的索引顺序,即对应于outputLocations中检测框的顺序
for (int j = i + 1; j < validCount; ++j) // 从 n+1 开始遍历剩余的检测框
{
int m = order[j];
if (m == -1)
{
continue;
}
// 当前检测框
float xmin0 = outputLocations[n * 4 + 0]; // xmin
float ymin0 = outputLocations[n * 4 + 1]; // ymin
float xmax0 = outputLocations[n * 4 + 0] + outputLocations[n * 4 + 2]; // xmin + w = xmax
float ymax0 = outputLocations[n * 4 + 1] + outputLocations[n * 4 + 3]; // ymin + h = ymax
// 剩余检测框
float xmin1 = outputLocations[m * 4 + 0];
float ymin1 = outputLocations[m * 4 + 1];
float xmax1 = outputLocations[m * 4 + 0] + outputLocations[m * 4 + 2];
float ymax1 = outputLocations[m * 4 + 1] + outputLocations[m * 4 + 3];
float iou = CalculateOverlap(xmin0, ymin0, xmax0, ymax0, xmin1, ymin1, xmax1, ymax1); // 计算交并比
if (iou > threshold) // 交并比大于阈值,即认为是同一个目标的检测框
{
order[j] = -1;
}
}
}
return 0;
}
static int quick_sort_indice_inverse(
std::vector<float> &input, // 待排序的向量
int left, // 排序范围的左右边界
int right,
std::vector<int> &indices) // 与input相对应的索引向量
{
float key;
int key_index;
int low = left;
int high = right;
if (left < right)
{
key_index = indices[left];
key = input[left];
while (low < high)
{
while (low < high && input[high] <= key)
{
high--;
}
input[low] = input[high];
indices[low] = indices[high];
while (low < high && input[low] >= key)
{
low++;
}
input[high] = input[low];
indices[high] = indices[low];
}
input[low] = key;
indices[low] = key_index;
quick_sort_indice_inverse(input, left, low - 1, indices);
quick_sort_indice_inverse(input, low + 1, right, indices);
}
return low;
}
static float sigmoid(float x)
{
return 1.0 / (1.0 + expf(-x));
}
static float unsigmoid(float y)
{
return -1.0 * logf((1.0 / y) - 1.0);
}
inline static int32_t __clip(float val, float min, float max)
{
float f = val <= min ? min : (val >= max ? max : val);
return f;
}
// 将一个浮点数(32)进行量化转换为一个固定范围内的整数值(uint8_t),并添加零点偏移(zp)和缩放因子(scale)的调整
static uint8_t qnt_f32_to_affine(float f32, uint8_t zp, float scale)
{
float dst_val = (f32 / scale) + zp;
uint8_t res = (uint8_t)__clip(dst_val, 0, 255); // 将结果限制到0~255之间,并转化为uint8_t
return res;
}
// 一个经过量化转换和调整的整数值(qnt)反量化回浮点数
static float deqnt_affine_to_f32(uint8_t qnt, uint8_t zp, float scale)
{
return ((float)qnt - (float)zp) * scale;
}
// 从输入数据中提取边界框,对边界框进行解码和筛选,并将结果存储到相应的向量中
static int process_u8(uint8_t *input, int *anchor, int grid_h, int grid_w, int height, int width, int stride,
std::vector<float> &boxes, std::vector<float> &boxScores, std::vector<int> &classId,
float threshold, uint8_t zp, float scale)
{
int validCount = 0;
int grid_len = grid_h * grid_w; // 网格的高度*宽度
float thres = unsigmoid(threshold);
uint8_t thres_u8 = qnt_f32_to_affine(thres, zp, scale); // 置信度量化为整数
for (int a = 0; a < 3; a++) // 每个网格位置有三个锚框
{
for (int i = 0; i < grid_h; i++) // 当前网格的列索引,可以理解为图像的行数
{
for (int j = 0; j < grid_w; j++) // 当前网格的行索引,可以理解为图像的列数
{
uint8_t box_confidence = input[(COCO_PROP_BOX_SIZE * a + 4) * grid_len + i * grid_w + j]; // dan
// COCO_PROP_BOX_SIZE为常量,每个边界框的属性数量,这里应该是85;
// +4是为了跳过边界框信息,以便直接获取边界框的置信度
// (COCO_PROP_BOX_SIZE * a + 4) * grid_len
// grid_len表示网格的总长度;
// 不过这里我也看不懂rknn的输出,毕竟这句代码我看得太困惑,与onnx模型后处理的时候不一样
if (box_confidence >= thres_u8) // 如果置信度大于阈值
{
int offset = (COCO_PROP_BOX_SIZE * a) * grid_len + i * grid_w + j; // 计算偏移量
uint8_t *in_ptr = input + offset; // 获取输入指针
// 计算bounding box的x坐标
float box_x = sigmoid(deqnt_affine_to_f32(*in_ptr, zp, scale)) * 2.0 - 0.5;
float box_y = sigmoid(deqnt_affine_to_f32(in_ptr[grid_len], zp, scale)) * 2.0 - 0.5;
float box_w = sigmoid(deqnt_affine_to_f32(in_ptr[2 * grid_len], zp, scale)) * 2.0;
float box_h = sigmoid(deqnt_affine_to_f32(in_ptr[3 * grid_len], zp, scale)) * 2.0;
// 根据当前点的位置和步长,缩放box的x和y坐标
box_x = (box_x + j) * (float)stride;
box_y = (box_y + i) * (float)stride;
// 根据anchor的尺寸缩放box的宽度和高度
box_w = box_w * box_w * (float)anchor[a * 2];
box_h = box_h * box_h * (float)anchor[a * 2 + 1];
// 将box的坐标转换为左上角坐标和宽度、高度,并存储在boxes数组中
box_x -= (box_w / 2.0);
box_y -= (box_h / 2.0);
boxes.push_back(box_x);
boxes.push_back(box_y);
boxes.push_back(box_w);
boxes.push_back(box_h);
// 获取最大类别概率值和对应的类别ID
uint8_t maxClassProbs = in_ptr[5 * grid_len];
int maxClassId = 0;
for (int k = 1; k < COCO_CLASS_NUM; ++k)
{
uint8_t prob = in_ptr[(5 + k) * grid_len];
if (prob > maxClassProbs)
{
maxClassId = k;
maxClassProbs = prob;
}
}
// 将box_confidence和类别概率值进行逆量化并转换位浮点数
float box_conf_f32 = sigmoid(deqnt_affine_to_f32(box_confidence, zp, scale));
float class_prob_f32 = sigmoid(deqnt_affine_to_f32(maxClassProbs, zp, scale));
// 计算Box_scores,并存储在boxScores中
boxScores.push_back(box_conf_f32* class_prob_f32);
// 将最大类别的ID存储在classId数组中
classId.push_back(maxClassId);
// 增加有效目标框的数量
validCount++;
}
}
}
}
return validCount;
}
static int process_fp(float *input, int *anchor, int grid_h, int grid_w, int height, int width, int stride,
std::vector<float> &boxes, std::vector<float> &boxScores, std::vector<int> &classId,
float threshold)
{
int validCount = 0;
int grid_len = grid_h * grid_w;
float thres_sigmoid = unsigmoid(threshold);
for (int a = 0; a < 3; a++)
{
for (int i = 0; i < grid_h; i++)
{
for (int j = 0; j < grid_w; j++)
{
float box_confidence = input[(COCO_PROP_BOX_SIZE * a + 4) * grid_len + i * grid_w + j];
if (box_confidence >= thres_sigmoid)
{
int offset = (COCO_PROP_BOX_SIZE * a) * grid_len + i * grid_w + j;
float *in_ptr = input + offset;
float box_x = sigmoid(*in_ptr) * 2.0 - 0.5;
float box_y = sigmoid(in_ptr[grid_len]) * 2.0 - 0.5;
float box_w = sigmoid(in_ptr[2 * grid_len]) * 2.0;
float box_h = sigmoid(in_ptr[3 * grid_len]) * 2.0;
box_x = (box_x + j) * (float)stride;
box_y = (box_y + i) * (float)stride;
box_w = box_w * box_w * (float)anchor[a * 2];
box_h = box_h * box_h * (float)anchor[a * 2 + 1];
box_x -= (box_w / 2.0);
box_y -= (box_h / 2.0);
boxes.push_back(box_x);
boxes.push_back(box_y);
boxes.push_back(box_w);
boxes.push_back(box_h);
float maxClassProbs = in_ptr[5 * grid_len];
int maxClassId = 0;
for (int k = 1; k < COCO_CLASS_NUM; ++k)
{
float prob = in_ptr[(5 + k) * grid_len];
if (prob > maxClassProbs)
{
maxClassId = k;
maxClassProbs = prob;
}
}
float box_conf_f32 = sigmoid(box_confidence);
float class_prob_f32 = sigmoid(maxClassProbs);
boxScores.push_back(box_conf_f32* class_prob_f32);
classId.push_back(maxClassId);
validCount++;
}
}
}
}
return validCount;
}
int yolov5_post_process_u8(uint8_t *input0, uint8_t *input1, uint8_t *input2, int model_in_h, int model_in_w,
float conf_threshold, float nms_threshold,
std::vector<uint8_t> &qnt_zps, std::vector<float> &qnt_scales,
coco_detect_result_group_t *group)
{
static int init = -1;
if (init == -1)
{
/*
int ret = 0;
ret = loadLabelName(LABEL_NALE_TXT_PATH, labels);
if (ret < 0)
{
return -1;
}
*/
init = 0;
}
// 初始化输出参数
memset(group, 0, sizeof(coco_detect_result_group_t));
// 定义储存结果的数组
std::vector<float> filterBoxes;
std::vector<float> boxesScore;
std::vector<int> classId;
// 第一个输入的步长和网格大小
int stride0 = 8;
int grid_h0 = model_in_h / stride0;
int grid_w0 = model_in_w / stride0;
int validCount0 = 0;
// 处理第一个输入,提取bounding box和类别信息
validCount0 = process_u8(input0, (int *)anchor0, grid_h0, grid_w0, model_in_h, model_in_w,
stride0, filterBoxes, boxesScore, classId, conf_threshold, qnt_zps[0], qnt_scales[0]);
// 第二个输入的步长和网格大小
int stride1 = 16;
int grid_h1 = model_in_h / stride1;
int grid_w1 = model_in_w / stride1;
int validCount1 = 0;
// 处理第二个输入,提取bounding box和类别信息
validCount1 = process_u8(input1, (int *)anchor1, grid_h1, grid_w1, model_in_h, model_in_w,
stride1, filterBoxes, boxesScore, classId, conf_threshold, qnt_zps[1], qnt_scales[1]);
// 第三个输入的步长和网格大小
int stride2 = 32;
int grid_h2 = model_in_h / stride2;
int grid_w2 = model_in_w / stride2;
int validCount2 = 0;
// 处理第三个输入,提取bounding box和类别信息
validCount2 = process_u8(input2, (int *)anchor2, grid_h2, grid_w2, model_in_h, model_in_w,
stride2, filterBoxes, boxesScore, classId, conf_threshold, qnt_zps[2], qnt_scales[2]);
// 计算有效目标框的总数
int validCount = validCount0 + validCount1 + validCount2;
// 没有检测到目标
if (validCount <= 0)
{
return 0;
}
// 创建索引数组
std::vector<int> indexArray;
for (int i = 0; i < validCount; ++i)
{
indexArray.push_back(i);
}
// 对得分进行降序排序,并更新索引数组
quick_sort_indice_inverse(boxesScore, 0, validCount - 1, indexArray);
// 进行非极大值抑制,去除冗余框
nms(validCount, filterBoxes, indexArray, nms_threshold);
int last_count = 0;
group->count = 0;
/* 处理有效的检测目标框 */
for (int i = 0; i < validCount; ++i)
{
if (indexArray[i] == -1 || boxesScore[i] < conf_threshold || last_count >= COCO_NUMB_MAX_SIZE)
{
continue;
}
int n = indexArray[i];
// 计算每个目标框的坐标
float x1 = filterBoxes[n * 4 + 0];
float y1 = filterBoxes[n * 4 + 1];
float x2 = x1 + filterBoxes[n * 4 + 2];
float y2 = y1 + filterBoxes[n * 4 + 3];
int id = classId[n];
/*
group->results[last_count].box.left = (int)((clamp(x1, 0, model_in_w) - w_offset) / resize_scale);
group->results[last_count].box.top = (int)((clamp(y1, 0, model_in_h) - h_offset) / resize_scale);
group->results[last_count].box.right = (int)((clamp(x2, 0, model_in_w) - w_offset) / resize_scale);
group->results[last_count].box.bottom = (int)((clamp(y2, 0, model_in_h) - h_offset) / resize_scale);
*/
// 更新目标检测框的边界框坐标、置信度和类别信息
group->results[last_count].box.left = (int) clamp(x1, 0, model_in_w);
group->results[last_count].box.top = (int) clamp(y1, 0, model_in_h);
group->results[last_count].box.right = (int) clamp(x2, 0, model_in_w);
group->results[last_count].box.bottom = (int) clamp(y2, 0, model_in_h);
group->results[last_count].prop = boxesScore[i];
group->results[last_count].class_index = id;
char *label = labels[id];
strncpy(group->results[last_count].name, label, COCO_NAME_MAX_SIZE);
// printf("result %2d: (%4d, %4d, %4d, %4d), %s\n", i, group->results[last_count].box.left, group->results[last_count].box.top,
// group->results[last_count].box.right, group->results[last_count].box.bottom, label);
last_count++;
}
// 更新目标检结果的数量
group->count = last_count;
return 0;
}
int yolov5_post_process_fp(float *input0, float *input1, float *input2, int model_in_h, int model_in_w,
float conf_threshold, float nms_threshold,
coco_detect_result_group_t *group)
{
static int init = -1;
if (init == -1)
{
/*
int ret = 0;
ret = loadLabelName(LABEL_NALE_TXT_PATH, labels);
if (ret < 0)
{
return -1;
}
*/
init = 0;
}
memset(group, 0, sizeof(coco_detect_result_group_t));
std::vector<float> filterBoxes;
std::vector<float> boxesScore;
std::vector<int> classId;
int stride0 = 8;
int grid_h0 = model_in_h / stride0;
int grid_w0 = model_in_w / stride0;
int validCount0 = 0;
validCount0 = process_fp(input0, (int *)anchor0, grid_h0, grid_w0, model_in_h, model_in_w,
stride0, filterBoxes, boxesScore, classId, conf_threshold);
int stride1 = 16;
int grid_h1 = model_in_h / stride1;
int grid_w1 = model_in_w / stride1;
int validCount1 = 0;
validCount1 = process_fp(input1, (int *)anchor1, grid_h1, grid_w1, model_in_h, model_in_w,
stride1, filterBoxes, boxesScore, classId, conf_threshold);
int stride2 = 32;
int grid_h2 = model_in_h / stride2;
int grid_w2 = model_in_w / stride2;
int validCount2 = 0;
validCount2 = process_fp(input2, (int *)anchor2, grid_h2, grid_w2, model_in_h, model_in_w,
stride2, filterBoxes, boxesScore, classId, conf_threshold);
int validCount = validCount0 + validCount1 + validCount2;
// no object detect
if (validCount <= 0)
{
return 0;
}
std::vector<int> indexArray;
for (int i = 0; i < validCount; ++i)
{
indexArray.push_back(i);
}
quick_sort_indice_inverse(boxesScore, 0, validCount - 1, indexArray);
nms(validCount, filterBoxes, indexArray, nms_threshold);
int last_count = 0;
group->count = 0;
/* box valid detect target */
for (int i = 0; i < validCount; ++i)
{
if (indexArray[i] == -1 || boxesScore[i] < conf_threshold || last_count >= COCO_NUMB_MAX_SIZE)
{
continue;
}
int n = indexArray[i];
float x1 = filterBoxes[n * 4 + 0];
float y1 = filterBoxes[n * 4 + 1];
float x2 = x1 + filterBoxes[n * 4 + 2];
float y2 = y1 + filterBoxes[n * 4 + 3];
int id = classId[n];
/*
group->results[last_count].box.left = (int)((clamp(x1, 0, model_in_w) - w_offset) / resize_scale);
group->results[last_count].box.top = (int)((clamp(y1, 0, model_in_h) - h_offset) / resize_scale);
group->results[last_count].box.right = (int)((clamp(x2, 0, model_in_w) - w_offset) / resize_scale);
group->results[last_count].box.bottom = (int)((clamp(y2, 0, model_in_h) - h_offset) / resize_scale);
*/
group->results[last_count].box.left = (int) clamp(x1, 0, model_in_w);
group->results[last_count].box.top = (int) clamp(y1, 0, model_in_h);
group->results[last_count].box.right = (int) clamp(x2, 0, model_in_w);
group->results[last_count].box.bottom = (int) clamp(y2, 0, model_in_h);
group->results[last_count].prop = boxesScore[i];
group->results[last_count].class_index = id;
char *label = labels[id];
strncpy(group->results[last_count].name, label, COCO_NAME_MAX_SIZE);
// printf("result %2d: (%4d, %4d, %4d, %4d), %s\n", i, group->results[last_count].box.left, group->results[last_count].box.top,
// group->results[last_count].box.right, group->results[last_count].box.bottom, label);
last_count++;
}
group->count = last_count;
return 0;
}CMakeLists.txt
cmake_minimum_required(VERSION 2.8.4)
STRING(REGEX REPLACE ".*/(.*)" "\\1" CURRENT_FOLDER ${CMAKE_CURRENT_SOURCE_DIR} )
MESSAGE("current project: " ${CURRENT_FOLDER})
set(CMAKE_SYSTEM_NAME Linux)
set(CMAKE_CROSSCOMPILING TRUE)
cmake_host_system_information(RESULT arch_value QUERY OS_PLATFORM)
if(NOT "${arch_value}" STREQUAL "armv7l")
include ($ENV{HOME}/configs/cross.cmake)
endif()
project(yolov5_detect_demo)
## 算法头文件
set(sdk_inc include/)
## 算法源码
file(GLOB file_source lib/*.cpp *.cpp)
set(source ${file_source})
find_package(OpenCV REQUIRED)
add_executable(yolov5_detect_demo ${source})
target_include_directories(yolov5_detect_demo PUBLIC ${sdk_inc} ${OpenCV_INCLUDE_DIRS})
target_link_libraries(yolov5_detect_demo pthread rknn_api ${OpenCV_LIBS})
参考: