| 项目名称 |
实验六 使用MoveIt! |
成绩 |
|
| 内容:机械臂、体系结构、简单运动规划、抓取放置任务 |
|||
| 实验记录(70分) 按实验一完成升级配置。 如果需要查阅moveit详细资料,参考如下官网截图:
本实验需要安装moveit及其相关功能包如下: sudo apt install ros-kinetic-moveit ros-kinetic-abb ros-kinetic-ur-e-gazebo ros-kinetic-ur-e-description 等待安装完成后,输入如下指令: roslaunch abb_irb2400_moveit_config demo.launch
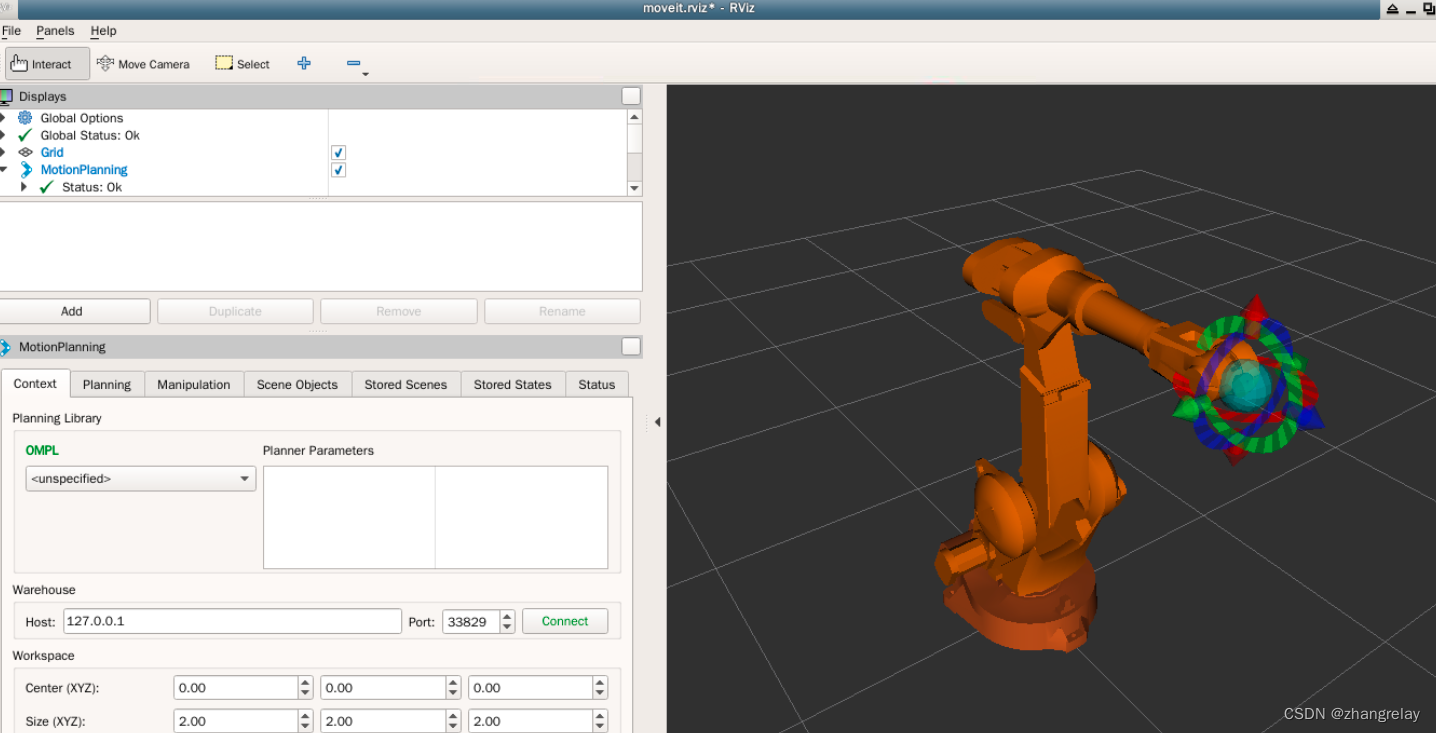
打开ABB机器人进行演示:
左面是运动规划和相关插件,右面是ABB2400机械臂的三维显示。
移动机械臂末端到自己想要的位置。 按照需求来使用算法,使用plan进行规划,使用Execute进行运行:
修改一些参数,再次尝试:
|
|||
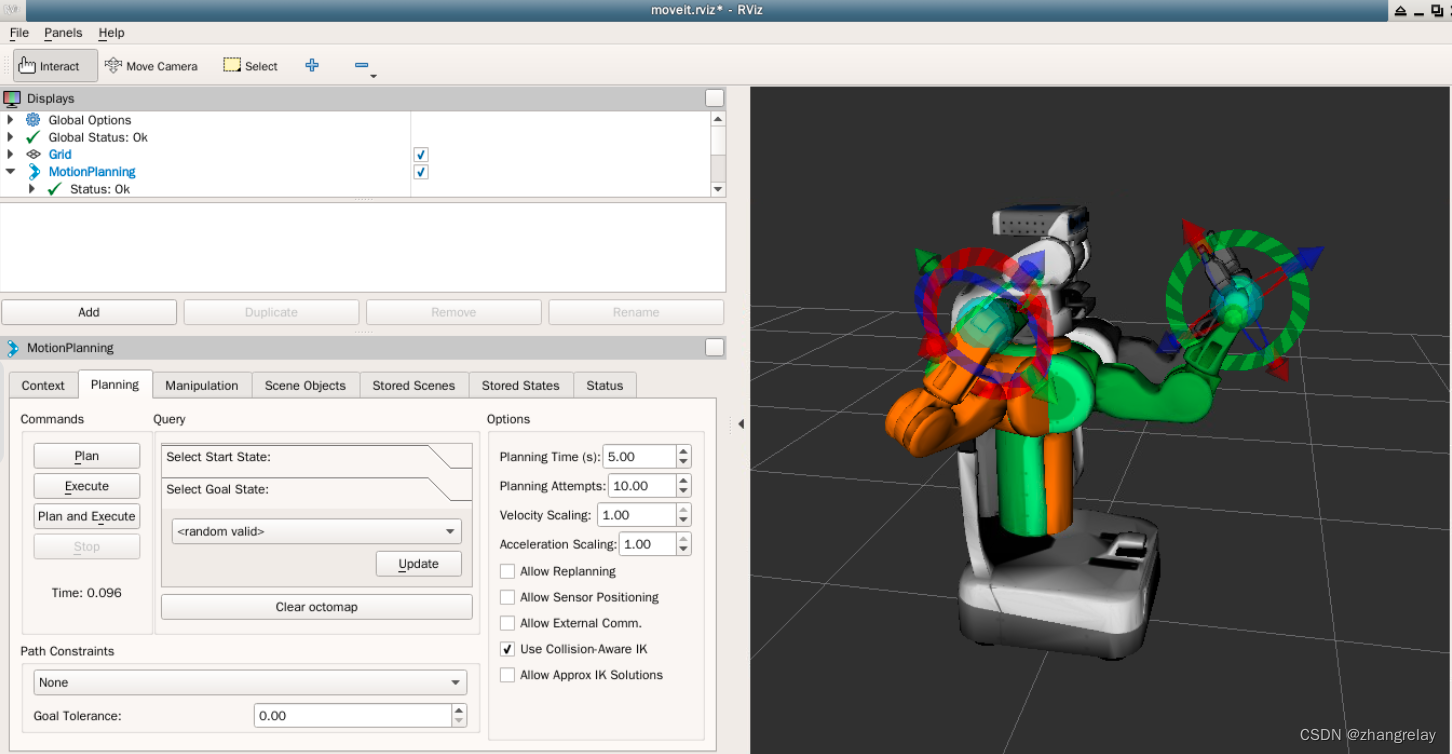
| 思考题(30分): 测试一款双臂移动机器人pr2。 命令行:roslaunch pr2_moveit_config demo.launch 打开第二种机器人:
也可以按照上述实验步骤进行操作。 |
|||




蓝桥云课ROS机器人实验报告-06工业机械臂-使用Moveit! 的大纲可以包括以下内容:
- 介绍Moveit!是什么,它的功能以及它在机器人控制中的应用。
- 介绍如何安装和配置Moveit!,包括ROS环境、Moveit!软件、机器人模型等。
- 介绍Moveit!的界面和操作,包括运动规划、碰撞检测、运动学仿真等。
- 演示使用Moveit!进行机器人运动规划和控制,包括手动控制机器人、自动控制机器人、路径规划等。
- 介绍Moveit!的插件和扩展,例如URDF模型、Kinematics Solver等。
- 介绍机器人安全操作方法和安全区域设置。
- 实验总结和思考题,总结实验过程中的收获和遇到的问题,思考如何改进和完善Moveit!的使用和功能。
以上是大纲可能的组成部分,具体内容可以根据实验的目的和要求进行修改和补充。
蓝桥云课ROS机器人旧版实验报告-06工业机械臂-使用Moveit! 进阶实验步骤可能包括以下步骤:
- 安装和配置Moveit!:首先需要安装ROS环境、Moveit!软件和机器人模型。确保所有软件和配置正确,并能正常连接机器人。
- 初始化Moveit!:启动Moveit!后,需要进行初始化配置。配置包括机器人位姿、运动范围、碰撞检测、运动学求解等。
- 手动控制机器人:通过Moveit!的界面,手动控制机器人的运动。观察机器人的运动情况和Moveit!的界面显示,了解机器人的运动学特性。
- 自动控制机器人:使用Moveit!的自动控制功能,编写控制程序,实现机器人的自动控制。例如,可以编写程序实现机器人的自动避障、自动路径跟踪等。
- 路径规划:使用Moveit!的路径规划功能,实现机器人的路径规划。可以手动规划路径或者使用自主移动机器人进行自主路径规划。
- 插件和扩展:使用Moveit!的插件和扩展,例如URDF模型、Kinematics Solver等,扩展机器人的功能和能力。
- 安全操作和设置:在进行实验时,需要注意机器人的安全操作和设置安全区域。使用Moveit!的安全功能,例如碰撞检测和避障,确保机器人在运动过程中的安全。
以上是实验的可能步骤,具体步骤和操作根据具体的实验环境和要求可能会有所不同。在实验过程中,需要仔细阅读Moveit!的文档和教程,了解更多功能和操作方法。
蓝桥云课ROS机器人旧版实验报告-06工业机械臂-使用Moveit! 的详细功能说明可能包括以下内容:
- 运动规划:Moveit!提供了运动规划功能,能够根据机器人的状态和目标位姿,生成合理的运动路径和轨迹。可以通过Moveit!的界面或编程实现运动规划。
- 碰撞检测:Moveit!具有碰撞检测功能,能够检测机器人运动过程中是否存在碰撞风险,并避免碰撞发生。通过设置机器人的碰撞检测传感器和障碍物模型,可以实现机器人的自主避障。
- 运动学仿真:Moveit!提供了运动学仿真功能,能够在机器人运动前进行运动学模拟,验证机器人的运动能力和可达性。通过运动学仿真,可以发现机器人的运动缺陷和问题,并进行调整和优化。
- 手动控制:通过Moveit!的界面,可以手动控制机器人的运动。手动控制可以用于机器人初始状态的调整和运动路径的调试。
- 自动控制:使用Moveit!的自动控制功能,可以编写控制程序,实现机器人的自动控制。例如,可以编写程序实现机器人的自动避障、自动路径跟踪等。
- 路径规划:使用Moveit!的路径规划功能,可以实现机器人的路径规划。可以手动规划路径或者使用自主移动机器人进行自主路径规划。
- 插件和扩展:Moveit!提供了插件和扩展功能,可以扩展机器人的功能和能力。例如,使用URDF模型、Kinematics Solver等插件,可以扩展机器人的运动学求解和运动规划能力。
- 安全操作和设置:在使用Moveit!控制机器人时,需要注意机器人的安全操作和设置安全区域。使用Moveit!的安全功能,例如碰撞检测和避障,可以确保机器人在运动过程中的安全。
以上是Moveit!的可能功能说明,具体功能和使用方法根据具体的实验环境和要求可能会有所不同。在实验过程中,需要仔细阅读Moveit!的文档和教程,了解更多功能和操作方法。
蓝桥云课ROS机器人旧版实验报告-06工业机械臂-使用Moveit! 的核心要点总结可能包括以下内容:
- Moveit!是一个强大的ROS软件包,用于机械臂的运动规划、控制和仿真。
- 通过Moveit!可以手动控制和自动控制机械臂,实现路径规划和避障等功能。
- Moveit!根据机器人的模型和约束条件进行运动规划,并可以进行运动学仿真和碰撞检测。
- 使用Moveit!需要进行机器人模型的建立和配置,同时注意机器人的安全操作和设置安全区域。
- Moveit!提供了插件和扩展功能,可以扩展机器人的功能和能力。
以上是蓝桥云课ROS机器人旧版实验报告-06工业机械臂-使用Moveit! 的核心要点总结,具体内容根据具体的实验环境和要求可能会有所不同。在实验过程中,需要仔细阅读Moveit!的文档和教程,了解更多功能和操作方法。
以下是一个使用Moveit!控制工业机械臂的示例代码:
import rospy
import moveit
rospy.init_node('move_group_python_interface_demo_node')
move_group = moveit.MoveGroup('robot_arm')
# 设置目标位姿
target_pose = Pose(
position=Point(x=0.5, y=0.5, z=0),
orientation=Quaternion(x=0.0, y=0.0, z=0.7071067811865476, w=0.7071067811865475))
# 执行运动规划
move_group.set_pose_target(target_pose)
plan = move_group.plan(timeout=rospy.Duration(5.0))
# 执行运动
move_group.execute(plan)
# 订阅ROS话题,监听机器人运动状态
rospy.Subscriber('move_group/state', String, state_cb)
# 定义回调函数
def state_cb(data):
# 从ROS话题中解析出机器人当前状态
current_state = moveit_msgs.msg.String()
current_state.data = data.data.decode('utf-8')
print('Current State:', current_state)
# 循环等待ROS话题
rospy.spin()这段代码演示了如何使用Moveit!控制工业机械臂,包括设置目标位姿、执行运动规划、执行运动以及监听机器人运动状态等操作。在实际应用中,可以根据具体需求进行修改和扩展。
蓝桥云课ROS机器人实验报告-06工业机械臂-使用Moveit!相较于商业软件的优势可能包括以下内容:
- 免费使用:Moveit!是一个开源的ROS软件包,可以免费下载和使用,不需要支付任何费用。
- 高度可定制:Moveit!可以根据不同的机器人模型和需求进行定制化配置,满足不同的应用场景和需求。
- 社区支持:Moveit!拥有一个活跃的社区,提供了大量的的问题解答和支持,可以帮助用户快速解决问题和获得帮助。
- 持续更新:Moveit!是一个开源项目,持续更新和改进,可以跟随ROS的更新和机器人技术的进步,保持技术的先进性和稳定性。
- 跨平台支持:Moveit!可以在不同的操作系统和平台上运行,支持Windows、Linux和Mac OS等。
综上所述,使用Moveit!相较于商业软件具有更多的优势和灵活性,可以根据具体的需求和情况进行定制和配置,同时拥有活跃的社区支持和持续的更新改进。