简介: 在PyTorch中使用DistributedDataParallel进行多GPU分布式模型训练。
原文链接:https://towardsdatascience.com/distributed-model-training-in-pytorch-using-distributeddataparallel-d3d3864dc2a7
随着以ChatGPT为代表的大模型的不断涌现,如何在合理的时间内训练大模型逐渐成为一个重要的研究课题。为了解决这个问题,越来越多的从业者转向分布式训练。分布式训练是使用多个GPU和/或多个机器训练深度学习模型的技术。分布式训练作业能够克服单GPU内存瓶颈,通过同时利用多个GPU来开发更大,功能更强大的模型。
本文介绍使用torch.nn.parallel.DistributedDataParallel API在纯PyTorch中进行分布式训练的简介。主要内容有:
- 讨论一般的分布式训练方式,尤其是数据并行化
- 介绍
torch.dist和DistributedDataParallel的相关功能,并举例说明如何使用它们 - 测试真实的训练脚本,以节省时间
背景知识
在研究分布式和数据并行之前,需要先了解一些关于分布式训练的背景知识。目前普遍使用的分布式训练基本上有两种不同形式:数据并行化和模型并行化。
-
数据并行化中,模型训练作业是在数据上进行分割的。作业中的每个GPU接收到自己独立的数据批处理切片。每个GPU使用这些数据来独立计算梯度更新。例如,如果要使用两个GPU和32的批处理大小,一个GPU将处理前16条记录的向前和向后传播,第二个处理后16条记录的向后和向前传播。这些梯度更新然后在GPU之间同步,一起平均,最后应用到模型(同步步骤在技术上是可选的,但理论上更快的异步更新策略仍是一个活跃的研究领域)。
-
模型并行化中,模型训练作业是在模型上进行分割的。工作中的每个GPU接收模型的一个切片,例如它的层的一个子集。例如,一个GPU负责它的输出头,另一个负责输入层,另一个负责中间的隐藏层。
虽然这两种技术各有优缺点,但数据并行化在这两种技术中更容易实现(它不需要了解底层网络架构),因此通常首先尝试这种策略(也可以结合使用这些技术,例如同时使用模型和数据并行化,但这是一个高级主题,不在这里介绍)。
注意:本文是对DistributedDataParallel并行API的介绍,所以不再进一步讨论模型并行化的细节。
数据并行工作原理
第一个被广泛采用的数据并行技术是TensorFlow中的参数服务器策略。这个功能实际上早于TensorFlow的第一个版本,早在2012年google内部的前身DistBelief中就已经实现了。这一策略在下图中得到了很好的说明:
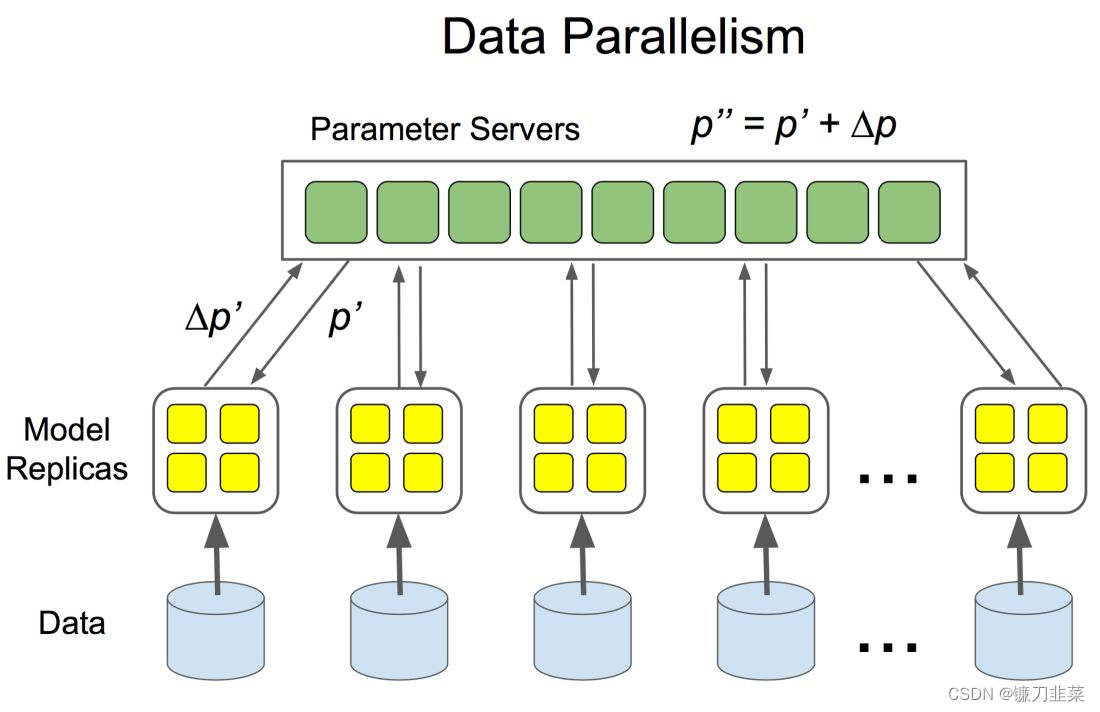
在参数服务器策略中,worker和parameter进程的数量是可变的,每个worker进程在GPU内存中维护自己的模型独立副本。梯度更新计算如下:
- 在接收到开始信号后,每个worker process为其特定的批处理slice积累梯度。
- 这些worker以扇出的方式将update发送到参数服务器。
- 参数服务器会一直等待,直到它们拥有所有worker更新,然后对它们负责的梯度更新参数空间的那部分梯度求平均。
- 梯度更新被分散到worker上,然后将它们加起来,应用到内存中模型权重的副本上(从而保持worker模型同步)。
- 一旦每个worker都应用了更新,新的一批训练就可以开始了。
虽然很容易实现,但是这个策略有一些主要的限制。最重要的一点是每个附加的参数服务器在每个同步步骤中都需要n_workers额外的网络调用——一个O(n)复杂度代价。计算的总体速度取决于最慢的连接,因此基于大参数服务器的模型训练作业在实践中效率非常低,将网络GPU利用率推到50%或以下。
更现代的分布式训练策略废除了参数服务器,在DistributedDataParallel并行策略中,每个进程都是一个work进程。每个进程仍然在内存中维护模型权重的完整副本,但是批处理slice梯度更新现在是同步的,并且直接在工作进程本身上平均。这是使用从高性能计算领域借来的技术来实现的:全归约算法(all-reduce algorithm)
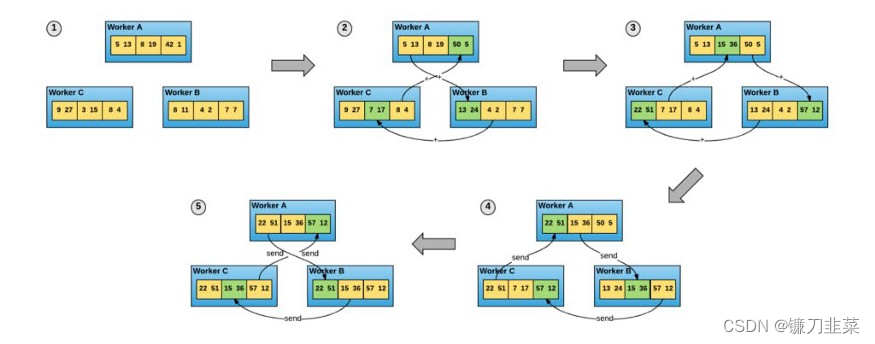
该图显示了全归约算法的一种特定实现方式,即循环全归约。 该算法提供了一种优雅的方式来同步一组进程之间的一组变量(在本例中为张量)的状态。 向量在直接的worker到worker连接的序列中直接传递。 这消除了worker与参数服务器之间的连接所造成的网络瓶颈,从而大大提高了性能。在该方案中,梯度更新计算如下:
- 每个 worker 维护它自己的模型权重副本和它自己的数据集副本。
- 在接收到开始信号后,每个工作进程从数据集中提取一个分离的批处理,并为该批处理计算一个梯度。
- worker使用all-reduce算法来同步他们各自的梯度,本地计算所有节点上相同的平均梯度。
- 每个worker都将梯度更新应用到它的本地模型副本上。
- 下一批训练开始。
在2017年百度的一篇论文《Bringing HPC Techniques to Deep Learning》中,这种全精简策略被提出。它的重要之处在于它基于众所周知的HPC技术以及长期存在的开源实现。All-reduce包含在消息传递接口(MPI)的标准中,这就是为什么PyTorch不少于三个不同的后端实现: Open MPI、NVIDIA NCCL和Facebook Gloo(一般情况下建议使用NVIDIA NCCL)
数据分发流程
1. 流程初始化
必须要知道的一点是将训练脚本修改为使用DistributedDataParallel并行策略并不是简单的一行更改。具体可以参考另外一篇博客:基于Pytorch的分布式数据并行训练
因此,需要处理的第一个也是最复杂的新事情是进程初始化。普通的PyTorch训练脚本在单个进程中执行其代码的单一副本。使用数据并行模型,情况就更加复杂了:现在训练脚本的同步副本与训练集群中的GPU数量一样多,每个GPU运行在不同的进程中。示例脚本如下:
import os
import torch
import torch.distributed as dist
import torch.multiprocessing as mp
def init_process(rank, size, backend='gloo'):
""" Initialize the distributed environment. """
os.environ['MASTER_ADDR'] = '127.0.0.1'
os.environ['MASTER_PORT'] = '29500'
dist.init_process_group(backend, rank=rank, world_size=size)
def train(rank, num_epochs, world_size):
init_process(rank, world_size)
print(f"Rank {
rank + 1}/{
world_size} process initialized.\n")
# rest of the training script goes here!WORLD_SIZE = torch.cuda.device_count()
if __name__ == "__main__":
mp.spawn(train, args=(NUM_EPOCHS, WORLD_SIZE), nprocs=WORLD_SIZE, join=True)
其中WORLD_SIZE是编排的进程数量,(全局)rank是当前进程在该MPI中的位置。如果这个脚本要在一个有4个GPU的机器上执行,WORLD_SIZE应该是4(因为torch.cuda.device_count() == 4),所以是mp.spawn会产生4个不同的进程,它们的rank分别是0、1、2或3。rank为0的进程被赋予一些额外的职责,因此被称为主进程。
当前进程的rank将作为派生入口点(在本例中为train function)作为其第一个参数传递。 在训练时可以执行任何工作之前,它需要首先建立与对等点对点的连接。 这是dist.init_process_group的工作。 在主进程中运行时,此方法在MASTER_ADDR:MASTER_PORT上设置套接字侦听器,并开始处理来自其他进程的连接。 一旦所有进程都已连接,此方法将处理建立对等连接,以允许进程进行通信。
请注意,此代码仅适用于在一台多GPU机器上进行训练! 同一台机器用于启动作业中的每个流程,因此训练只能利用连接到该特定机器的GPU。 这使事情变得容易:设置IPC就像在localhost上找到一个空闲端口一样容易,该端口对于该计算机上的所有进程都是立即可见的。 跨计算机的IPC更为复杂,因为它需要配置一个对所有计算机可见的外部IP地址。
2. 流程同步
了解了初始化过程,现在可以开始完成所有worker的train方法的主体。
def train(rank, num_epochs, world_size):
init_process(rank, world_size)
for epoch in range(num_epochs):
print(f"Rank {
rank + 1}/{
world_size} process initialized.\n")
四个训练过程中的每一个都会运行此函数直到完成,然后在完成时退出。 如果现在(通过python multi_init.py)运行此代码,将在控制台上看到类似以下内容:
$ python multi_init.py
Rank 4/4 process initialized.
Rank 2/4 process initialized.
Rank 4/4 process initialized.
Rank 2/4 process initialized.
Rank 3/4 process initialized.
Rank 4/4 process initialized.
Rank 2/4 process initialized.
Rank 3/4 process initialized.
Rank 4/4 process initialized.
Rank 2/4 process initialized.
Rank 4/4 process initialized.
Rank 3/4 process initialized.
Rank 2/4 process initialized.
Rank 3/4 process initialized.
Rank 3/4 process initialized.
Rank 1/4 process initialized.
Rank 1/4 process initialized.
Rank 1/4 process initialized.
Rank 1/4 process initialized.
Rank 1/4 process initialized.
这些过程是独立执行的,并且不能保证训练循环中任一点处于什么状态。 所以这里需要对初始化过程进行一些仔细的更改。
(1)任何下载数据的方法都应隔离到主进程中。
否则的话将在所有过程之间复制数据下载过程,从而导致四个过程同时写入同一文件,这是造成数据损坏的原因。
def train(rank, num_epochs, world_size):
init_process(rank, world_size)
for epoch in range(num_epochs):
if rank == 0:
downloading_dataset()
downloading_model_weights()
dist.barrier()
print(f"Rank {
rank + 1}/{
world_size} training process passed data download barrier.\n")
示例中的dist.barrier将阻塞调用,直到完成主进程(rank == 0)downloading_dataset和downloading_model_weights为止。 这样可以将所有网络I / O隔离到一个进程中,并防止其他进程继续前进。
(2)数据加载器需要使用DistributedSampler。
def get_dataloader(rank, world_size):
dataset = PascalVOCSegmentationDataset()
sampler = DistributedSampler(dataset, rank=rank, num_replicas=world_size, shuffle=True)
dataloader = DataLoader(dataset, batch_size=8, sampler=sampler)
DistributedSampler使用rank和world_size找出如何将整个过程中的数据集拆分为不重叠的批次。 worker进程的每个训练步骤都从其本地数据集副本中检索batch_size观测值。 在四个GPU的示例情况下,这意味着有效批大小为8 * 4 = 32。
(3)在正确的设备中加载张量。
请使用该进程正在管理的设备的rank来参数化.cuda()调用,例如:
batch = batch.cuda(rank)
segmap = segmap.cuda(rank)
model = model.cuda(rank)
(4)必须禁用模型初始化中的任何随机性。
在整个训练过程中,模型必须启动并保持同步,这一点非常重要。 否则,将获得不正确的梯度并导致模型无法收敛。可以使用以下代码使torch.nn.init.kaiming_normal_之类的随机初始化方法具有确定性:
torch.manual_seed(0)
torch.backends.cudnn.deterministic = True
torch.backends.cudnn.benchmark = False
np.random.seed(0)
(5)任何执行文件I / O的方法都应与主进程隔离。
由于并发写入同一文件而导致的效率低下和潜在的数据损坏。 同样,使用简单的条件逻辑很容易做到这一点:
if rank == 0:
if not os.path.exists('/spell/checkpoints/'):
os.mkdir('/spell/checkpoints/')
torch.save(model.state_dict(), f'/spell/checkpoints/model_{
epoch}.pth')
(6)将model包装在DistributedDataParallel中。
model = DistributedDataParallel(model, device_ids=[rank])
这一步是必须的,也是最后一步,之后模型就可以在分布式数据并行模式下训练。
数据并行
PyTorch中还有另一种数据并行化策略,即torch.nn.DataParallel。 该API易于使用。 要做的就是包装模型初始化,如下所示:
model = nn.DataParallel(model)
所有的改动只有一行! 为什么不使用它呢?因为在程序的后台,DataParallel使用多线程而不是多进程来管理其GPU工作器。 这极大地简化了实现:由于工作进程是同一进程的所有不同线程,因此它们都可以访问相同的共享状态,而无需任何其他同步步骤。但是,由于存在全局解释器锁GIL,在Python中将多线程用于计算作业的效果很差。 如下一节中的基准测试所示,使用DataParallel并行化的模型比使用DistributedDataParallel并行化的模型要慢得多。尽管如此,如果不想花费额外的时间和精力使用多GPU训练,DataParallel是可以考虑的。
基准测试
 DistributedDataParallel的效率明显高于DataParallel,但还远远不够完美。 从V100x1切换到V100x4是原始GPU功耗的4倍,但模型训练速度仅为3倍。 通过升级到V100x8使计算进一步加倍,只会使训练速度提高约30%,但是DataParallel的效率几乎达到了DistributedDataParallel的水平。
DistributedDataParallel的效率明显高于DataParallel,但还远远不够完美。 从V100x1切换到V100x4是原始GPU功耗的4倍,但模型训练速度仅为3倍。 通过升级到V100x8使计算进一步加倍,只会使训练速度提高约30%,但是DataParallel的效率几乎达到了DistributedDataParallel的水平。
相关资料
- 分布式TensorFlow入门教程
- 使用 Horovod 估算器和 PyTorch 进行分布式训练
- Distributed Parallel Training: Data Parallelism and Model Parallelism
- Distributed Parallel Training — Model Parallel Training
- torch.nn.parallel.DistributedDataParallel: 快速上手
- GETTING STARTED WITH DISTRIBUTED DATA PARALLEL
- Distributed Communication Package PyTorch文档
- randomness