前言
SURF(Speeded Up Robust Features)算法。该算法对旋转、尺度缩放、亮度变化等保持不变性,对视角变换、仿射变化、噪声也保持一定程度的稳定性,是一种非常优秀的局部特征描述算法。实时性相对较高。另外调研《电子稳像技术》一书,发现该书明确表明特征匹配技术实时性满足要求,工程应用广泛,可实施性强,进一步说明该算法的可实施性。其特征点提取过程见下图:

一、步骤一:尺度空间的极值检测
要想检测不同尺度的极值点,必须建立图像的尺度空间金字塔。SIFT等通过降采样的方式得到不同尺寸大小的图像建立金字塔,再求取每个特征层各像素响应值。而SURF算法不需要通过降采样的方式得到不同尺寸大小的图像建立金字塔,而是通过增大滤波器的方式得到不同尺度图像,实际过程中借助于不同大小盒式滤波器(Boxfilter)和原始图像的积分图像(Integal Images)的卷积计算来直接构建黑塞响应图像金字塔,盒式滤波器和积分图像的卷积计算可以近似得到二阶微分Hessian。在SURF特征点中我们搜索所有尺度空间上的图像,通过Hessian来识别潜在的对尺度和选择不变的兴趣点。
Hessian矩阵可用于描述函数的局部曲率。因此用图像点的二阶微分Hessian矩阵的行列式(Determinant of Hessian)的极大值,可以进行图像的斑点检测(Blob Detection)。其中对于Hessian矩阵定义,给定图像中的一个点,在点x处,尺寸为delta的Hessian矩阵公式如下,其中Lxx是标准差为delta的高斯二阶微分算子在像素点处与图像的卷积值。
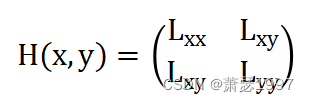
然而在计算图像点的二阶微分Hessian矩阵的行列式时可采取快速近似算法,即盒式滤波器和原始图像的积分图像的快速计算, 盒式滤波器对图像的滤波可转化成计算图像上不同区域间像素和的加减运算问题。已知公式如此,0.9为高斯二阶微分算子改为盒式滤波器所带来的误差:

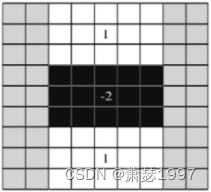
求Lxx,Lyy,Lxy的三种不同高斯二阶微分算子如下图所示:

而盒式滤波器同一区域的参数为相同值,Dyy如图所示:
因此,盒式滤波与图像的卷积处理可以演变成计算图像上不同区域间像素和的加减运算问题。如果我们已知一个区域的像素值和,可以更快速计算,因此引入积分图。
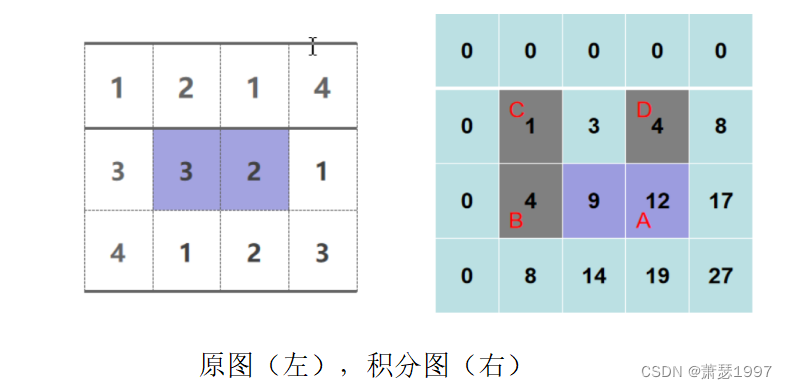
如若要利用积分图求原图中紫色区域的灰度和,则在积分图中找到对应区域(积分图中的紫色区域),公式为:A+C-B-D = 12+1-4 -4 = 5。*因此无论多大的盒式滤波同图像某处卷积,都可以用(A+C-B-D) value快速得到,value为盒式滤波值。 **使用近似的Hessian矩阵行列式来表示一个图像中某一点处的斑点响应值,遍历图像中的所有像素,便形成了在某一尺度下斑点检测的响应图像。使用不同的模糊尺度和模板尺寸,便形成了多尺度斑点响应的金字塔图像,利用这一金字塔图像,可以进行斑点响应极值点的搜索定位。然后在响应图像上采用非极大值抑制,检测不同尺度的特征点。
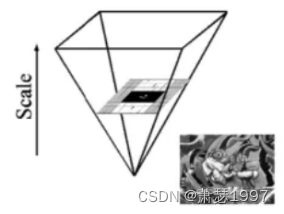
采用类似的方法处理其他组的模板序列,其方法是将滤波器尺寸增量按组数m翻倍,增加数依次为(6,12,24,48),则在盒式滤波金字塔中,每组滤波器的尺寸如下图所示,第二组和第三组的滤波器尺寸分别为(15,27,39,51)和(27,51,75,99)。滤波器的组数可由原始图像的尺寸决定。水平轴代表尺度,组之间有相互重叠,其目的是为了覆盖所有可能的尺度。
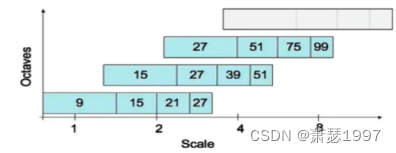
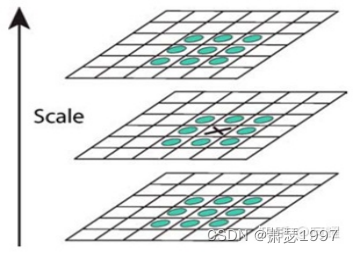
在通常尺度分析情况下,随着尺度的增大,被检测的特征点数迅速衰减。所以一般进行3-4组即可。建立尺度空间后,需要搜索定位关键点。将经过盒式滤波处理过的响应图像中每个像素点与其3维邻域中的26个像素点进行比较,若是最极大值点,则认为是该区域的局部特征点。然后,采用3维线性插值法得到亚像素级的特征点,同时去掉一些小于给定阈值的点,使得极值检测出来的特征点更稳健。
二、步骤二:特征方向赋值,特征点描述。
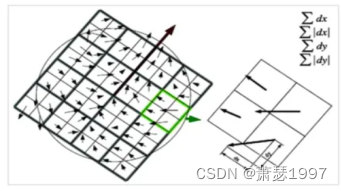
统计特征点圆形邻域内的Harr小波特征。即在60度扇形内,每次将60度扇形区域旋转0.2弧度进行统计,将值最大的那个扇形的方向作为该特征点的主方向。
Haar特征可以理解为卷积模板。Haar特征分为三类:边缘特征、线性特征、中心特征和对角线特征,组合成特征模板。特征模板内有白色和黑色两种矩形,定义该模板的特征值为白色矩形像素和减去黑色矩形像素和。Haar特征值反映了图像的灰度变化情况。
沿着特征点主方向周围的邻域内,取4×44×4个矩形小区域,统计每个小区域的Haar特征,然后每个区域得到一个4维的特征向量。一个特征点共有64维的特征向量作为SURF特征的描述子。
总结
今天把surf从新学习了以下,原理不难,且在图像配准中仍有很大应用空间。