对,你没看错。作为一款 RTOS,RT-Thread 提供了 Linux 才有的信号机制。其他常用的 RTOS 没有提供信号机制。
在 Linux 中,信号作为进程间通信的一种方式。而在 RT-Thread 中,仿照类似的原理,实现信号机制,用于线程(任务)间通信。
本篇文章,我们来学习 RT-Thread 信号的相关内容,以及如何进行管理和使用。
第一:信号的工作机制
同 Linux 中的信号类似,是一种软件层次的中断。
在 RT-Thread 中,信号用作异步通信。POSIX 标准定义了很多种信号,在 RT-Thread 中,应用程序能够使用的信号只有两种:
-
SIGUSR1 -
SIGUSR2
一个线程不需要任何操作来就可以等待信号的到达。线程对信号的处理分为三类:
-
类似中断处理,设定信号处理函数。
-
忽略信号,不进行处理
-
默认处理,采用系统默认的处理方式
线程接收到信号时,可能处于两种状态:
-
正在处于挂起状态,此时线程进入就绪状态去处理对应的信号
-
处于运行状态,系统会创建新的栈空间去处理对应的信号
第二:管理信号
在 RT-Thread 中,对信号的操作包括以下几种:
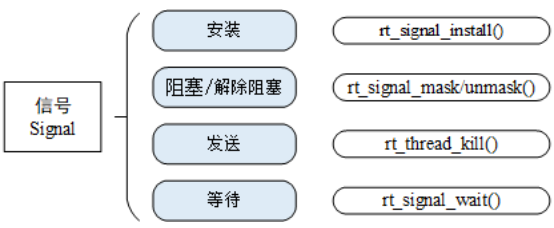
安装信号、阻塞信号、解除阻塞、信号发送、信号等待。
1.安装信号
安装信号,主要用来确定信号值以及处理信号所采取的动作之间的映射。
RT-Thread 提供的安装信号接口函数如下:
rt_sighandler_t rt_signal_install(int signo, rt_sighandler_t handler)
参数 signo 为信号值;handler 为对信号的处理方式函数。
安装成功,返回信号之前的处理函数指针;安装错误,则返回 SIG_ERR。
其中,rt_sighandler_t 的定义如下,是信号处理函数的函数指针类型。
typedef void (*rt_sighandler_t)(int signo);
2.阻塞信号
阻塞信号,也就是屏蔽信号。若信号被阻塞,则该信号将不会传递为安装此信号的线程。
函数原型如下:
void rt_signal_mask(int signo)
3.解除信号阻塞
线程安装好某个信号后,需要对该信号解除阻塞,线程才能够接收到该信号。
RT-Thread 提供的解除信号函数接口如下:
void rt_signal_unmask(int signo)
4.发送信号
一个线程给其他线程发送信号的函数接口如下:
int rt_thread_kill(rt_thread_t tid, int sig)
参数 tid 为接收信号的线程句柄;sig 为发送的信号值。
发送成功,返回 RT_EOK;发送失败,则返回 -RT_EINVAL。
5.等待信号
线程可以选择挂起等待某个信号。
int rt_signal_wait(const rt_sigset_t *set, rt_siginfo_t *si, rt_int32_t timeout)
参数 set 指定等待的信号;si 指向存储等待信号信息的指针;timeout 等待的超时时间。
函数返回 RT_EOK 说明信号到达,接收成功。等待超时,返回 -RT_ETIMEOUT。参数错误,则返回 -RT_EINVAL。
第三:实战演练
我们用一个示例来演示如何使用 RT-Thread 信号机制。
#include <rtthread.h>
#define THREAD_PRIORITY 8
#define THREAD_TIMESLICE 5
/* 线程控制块指针 */
rt_thread_t thread1 = RT_NULL;
/* 线程 1 的信号处理函数 */
void thread1_signal_handler(int sig)
{
rt_kprintf("thread1 received signal %d\n", sig);
}
/* 线程 1 入口 */
static void thread1_entry(void *parameter)
{
rt_uint8_t cnt = 0;
/* 安装信号 */
rt_signal_install(SIGUSR1, thread1_signal_handler);
/* 解除阻塞信号 */
rt_signal_unmask(SIGUSR1);
/* 运行 10 次 */
while (cnt < 10)
{
/* 线程 1 采用低优先级运行,一直打印计数值 */
rt_kprintf("thread1 count : %d\n", cnt);
cnt++;
rt_thread_mdelay(100);
}
}
int main()
{
/* 动态创建线程1 */
thread1 = rt_thread_create("thread1", thread1_entry, RT_NULL,
1024, THREAD_PRIORITY, THREAD_TIMESLICE);
if(thread1 != RT_NULL)
{
/* 启动线程 */
rt_thread_startup(thread1);
}
/* 延时等待 */
rt_thread_mdelay(300);
/* 发送信号 SIGUSR1 给线程1 */
rt_thread_kill(thread1, SIGUSR1);
return 0;
}
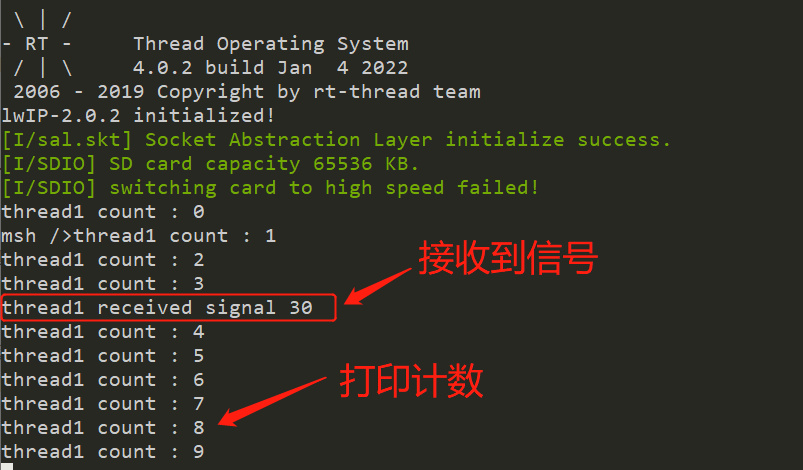
编译、运行结果如下
第四:小结
至此,RT-Thread 提供的线程间通信方式全部介绍完毕:
-
邮箱
-
消息队列
-
信号
三篇文章,三个方面,从原理到函数接口、再到实例演示,将这几种 RT-Thread 系统资源讲解一遍。
希望大家能够快速掌握这几部分的内容,并应用到实际的项目中去。