报错:

解决方式:
在功能包的include目录下找到头文件,

复制路径

打开.vscode文件夹的c_cpp_properties.json文件:

将文件加入包含中:
"${workspaceFolder}/devel/include",
${workspaceFolder}/src/robot_gazebo/include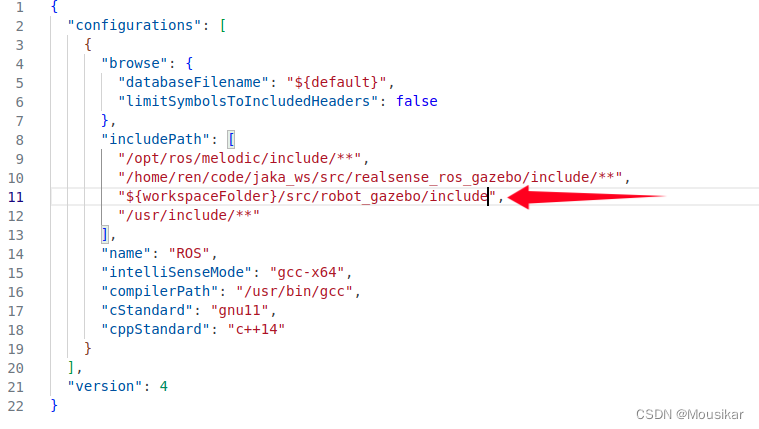
问题解决
报错:
解决方式:
在功能包的include目录下找到头文件,
复制路径
打开.vscode文件夹的c_cpp_properties.json文件:
将文件加入包含中:
"${workspaceFolder}/devel/include",
${workspaceFolder}/src/robot_gazebo/include
问题解决