双目相机国产、非国产统计参数对比分析
ZED
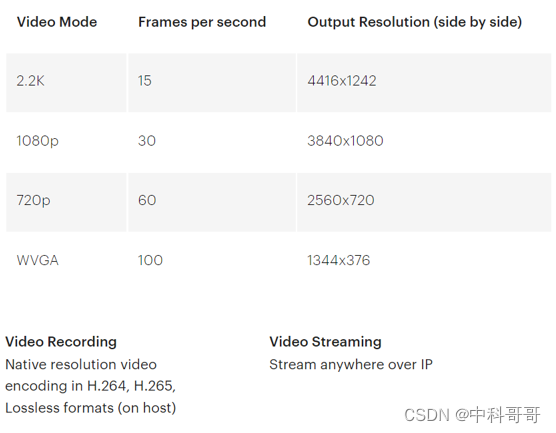
ZED是STEREOLABS出品的双目摄像头,广泛应用在科研机构的无人车、协作机械臂上,如图2-1所示。其3D分辨率在Ultra模式下可达到RGB时的分辨率,具体见图2-2,物理尺寸为175×30×33mm,帧率可达100FPS,深度范围为0.3-25m,视场角最大为90°(H)×60°(V)×100°(D),接口为USB3.0,支持ROS驱动。

Bumblebee系列
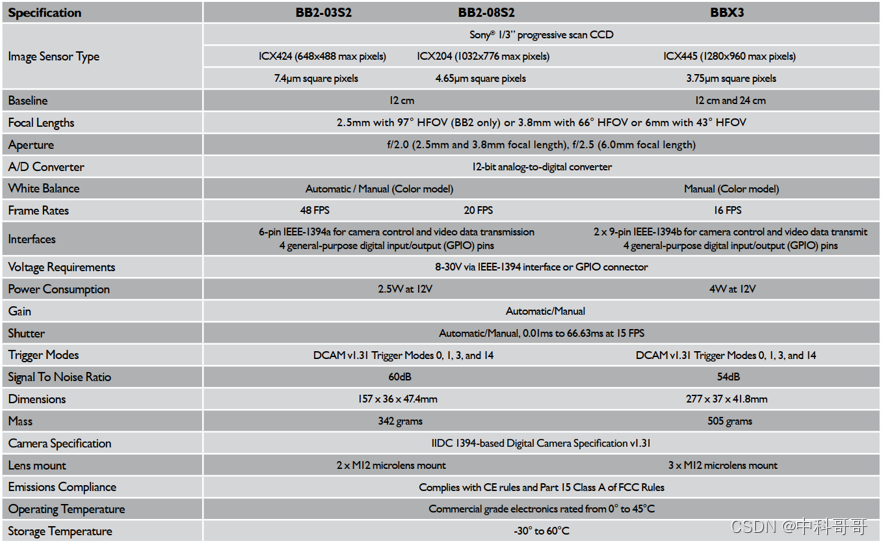
Bumblebee系列是美国红外热成像巨头菲力尔公司(FLIR System)的一款用于快速构建立体视频及立体重建的双/三目立体视觉组件,凌云光技术作为FLIR在国内的代理商。该系列利用双目立体匹配计算,可实时得到场景深度信息和三维模型。出厂即做好相机及镜头参数校正,适用于户内外各种环境下的立体视频研究,同ZED一样科研领域用在无人车、协作机械臂上较多,目前已到3代,2代已停产。
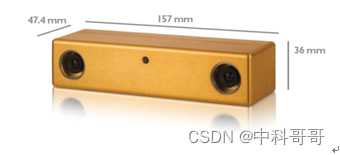
其相机参数如下:
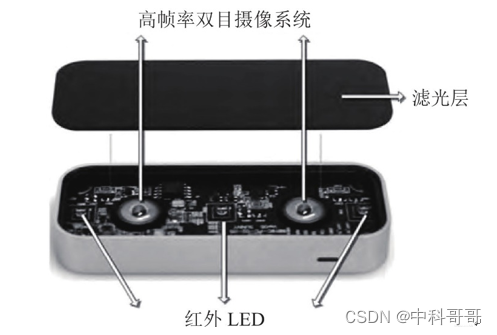
2.3 Leap Motion
Leap Motion是于2013由Ultraleap for Developers发布的面向PC及苹果电脑MAC的一款体感设备,是专门用于识别手部几何信息的体感设备,Leap Motion内置了双摄像头和3个红外LED灯来采集数据。相比于微软公司的Kinect和其他的Time-of-Flight摄像机,Leap Motion对手部的识别更加的精确,在手势交互方面更有优势;而相比于能够以更高的精度识别手部数据的数据手套,Leap Motion拥有价格更低的优势,在国内,Leap Motion的售价大概在人民币500-2000元左右(数据来自京东商城),虽然精度不如数据手套,但是在普通的应用场景,Leap Motion的精度足够。其物理尺寸为80mmL×30mmW×11.3mmH,深度范围在10cm-60cm,最高可达80cm,视场角为140°×120°,支持USB2.0。

此外,Ultraleap for Developers还有全新产品Ultraleap Stereo IR 170。Ultraleap Stereo IR 170是下一代光学手部跟踪模块,可捕捉用户的手以及手指以便于他们方便地与数字内容进行互动。它被集成到用于AR/VR/XR的企业级硬件解决方案、显示器、安装和虚拟/增强现实耳机原型设计、研究和开发。Stereo IR 170评估套件由Ultraleap Stereo IR 170摄像头模块组成,模块位于塑料外壳中,带有USB头,便于即插即用评估。其物理尺寸为105mmL×10mmW×7.7mmH,FPS为90,深度范围在10cm-75cm,最高可达1m,视场角为170°×170°,最小为160°×160°,支持USB2.0、USB3.0。

DUO 3D
DUO 3D的相机使用全局快门。但是分辨率比较低,在640×480的时候帧率为60FPS,焦距2mm,170度广角相机,SDK预完成立体匹配。其中一种DUO MLX型号的双目携带了6轴的IMU。产品SDK支持:Linux、Windows、MAC,支持arm、x86架构的CPU。
DUO-MINI-LV1(DUO M R2)型号的摄像头其物理尺寸为52.02mmL×25.40mmW×11.60mmH,基线长30mm,帧率可达0.1-3000+ FPS,分辨率有:45FPS@752×480、49FPS@640×480、98FPS@640×240、192FPS@640×120、86FPS@320×480、168FPS@320×240以及320FPS@320×120。视场角为170°Wide Angle Lens,采用USB2.0接口。

Viper工业级双目立体相机
Viper™是欧洲Rubedos公司推出的工业级双目立体相机,其三维视觉感知系统通过内置的NVIDIA Jetson™ Tx2处理器搭配用于特征点匹配的先进算法,实现了纯双目获取精准深度图像的功能。同时针对应用者提供例如跟随,物体识别等成熟的应用软件包,对于开发者提供丰富的Windows/Linux API并支持ROS,机身小巧便捷,拥有IP65的防护等级并支持根据用户需要定制开发专用的双目立体相机。
其物理尺寸为246mmH×98mmW×35mmH,基线长200mm,接口使用1Gb/s的以太网接口,镜头焦距为3.6mm,视场角为70°×43°×82°(H×V×D),深度帧率可达40FPS,深度范围为1-15m,最高可达50m,深度分辨率为1280×720,可以输出视差图、RGBD点云。
Carnegie Robotics® MultiSense™ S7
Carnegie Robotics公司的MultiSense S7是一款坚固耐用的短距离3D传感器,即使在最恶劣的环境中也能以GigE速度提供高分辨率和高精度数据。

MultiSense S7是一款高分辨率、高精度的3D传感器,可提供实时垂直和水平视野覆盖,以及每个距离点的颜色信息。S7是首款商用摄像头,具有完全集成的车载处理能力和自动校准功能。S7能够每秒匹配1100万个特征,从而获得更高的帧率和更密集的3D范围数据。S7的GigE连接提供了高度可靠的同类最佳性能。这些特点只是S7目前部署在国防、农业、采矿和重型装备等多个行业的部分原因;此外还广泛应用于机器人技术、传感、地图绘制和自动化应用。
S7的半全局立体匹配算法将左右摄像机图像转换为3D深度图和点云,并以高达30FPS的帧率传送。Carnegie Robotic公司最先进的校准过程是将像素数据转换为精确范围测量的关键,同时补偿透镜畸变、透镜错位和整体制造偏差。
其物理尺寸为13cmL×13cmW×6.5cmH,分辨率为2048×1088、2048×2048,帧率最高位30FPS,焦距为6.5cm,视场角为80°×49°、80°×80°,接口为1Gb/s的以太网接口,支持ROS。立体匹配采用的SGM(Semi-global Stereo Matching)算法,最大视差为256,子像素精
e-Con Systems Tara Stereo Camera
Tara是一款兼容UVC的3D立体相机,基于onsemi®的MT9V024立体传感器,支持WVGA((2*752)×480),以60fps的速度通过USB3.0以未压缩格式传输。该立体摄像头通过USB3.0接口向主机提供并排交错的两个同步传感器帧数据。Tara可用于客户开发立体相机算法,也可用于希望在产品设计中集成立体相机的客户。e-con Systems™ 3D立体相机是深度传感、视差图、点云、机器视觉、无人机、3D视频录制、手术机器人等应用的理想选择。
其物理尺寸为100mmL×30mmW×35mmH,3D分辨率为752×480,帧率为60FPS,视场角为60°H,接口使用USB3.0,支持ROS驱动,内置IMU。
SICK® Visionary-T™
SICK是工业用智能传感器和传感技术解决方案的主要制造商之一。独特的产品和服务范围为安全有效地控制流程创造基础,防止发生人身事故并且避免环境污染。
SICK® Visionary-T™系列3D视觉传感器为室内使用提供高度灵活性。基于飞行时间测量,Visionary-T为每个像素实时提供深度信息,包括用于固定式应用。传感器传输完整的原始数据以及针对特定应用经过预处理的数据,此外还可传输分析完毕的测量值,实现简单的传感器应答。性能强大的可视化工具以及可靠的3D信息使Visionary-T成为内部物流、机器人技术或工业车辆等领域的理想解决方案。在一次拍摄中采集超过25000个距离值和强度值,3D信息同样可用于固定式应用,且安装简便,可快速更换传感器。

其3D分辨率为144×176,帧率可达30FPS,视场角为69°H×56°V,物理尺寸为162×93×78mm,接口使用以太网接口,支持ROS驱动。
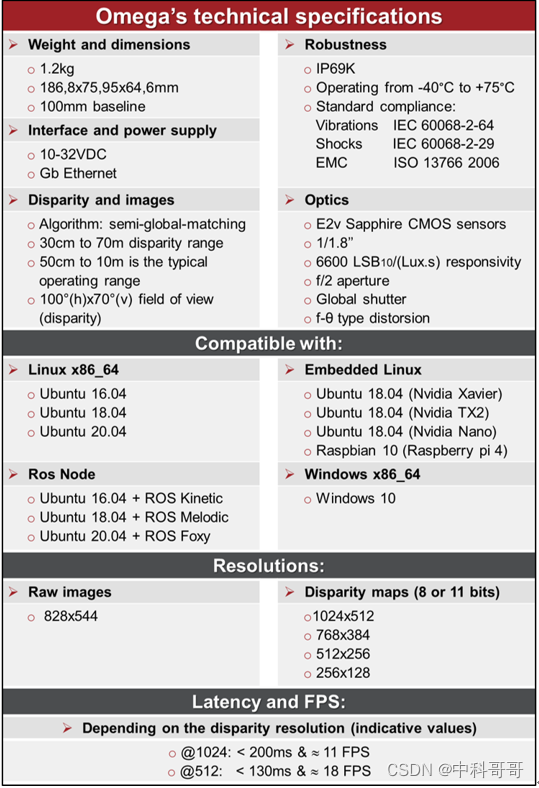
Arcure Omega
Arcure Omega是用于室内/室外应用的立体摄像机,适用于恶劣环境的可靠立体摄像机。Omega是一款智能而坚固的立体相机,可进行嵌入式计算以生成视差地图,该地图可以轻松转换为距离图。Omega拥有两个130万像素和120°视场的传感器,为用户提供元数据和视差映射,分辨率可配置,原始图像高达每秒20帧。Omega可在恶劣条件下运行:工作温度从-40°C到+75°C,冲击和振动。Omega是用于户外应用的最坚固的3D传感器,在采矿,建筑,工业,钢铁厂,农业活动方面拥有丰富的实地经验。
该相机可输出可靠、准确的3D数据,适用于恶劣环境中的各种应用,且在苛刻的条件下运行数小时后无需重新校准。立体传感器头提供:高分辨率RGB原始图像、视差图、校正图像。视差图在嵌入在相机中的FPGA上计算,这是一个完整的硬件实现,可提供低延迟和高能效解决方案。其参数如图下所示。
Nerian SceneScan
SceneScan是Nerian最新的3D深度感知解决方案,是SP1立体视觉传感器的改进版。SceneScan使用立体视觉和基于硬件的图像处理,可以实时计算观察环境的3D图像。与传统的深度相机不同,在可见或不可见的光谱范围内,不需要发出任何光线。因此,SceneScan即使在强光、远距离测量、重叠范围甚至水下测量等困难条件下也能提供精确的3D感知。

其物理尺寸为104.5mmL×105.5mmW×45mmH,接口支持USB3.0、Gigabit Ethernet以及GPIO,最大灰度分辨率为800×800,SceneScan不支持彩色图像,但SceneScan Pro可以输出864×864的彩色图像。深度范围为64-128像素,帧率最高可达45FPS,子像素分辨率为4bit(1/16th pixel)。其视差范围对应的图像分辨率如下所示:

大疆精灵Phantom4 Pro V2.0
大疆在Phantom4上实现了双目立体视觉系统加惯性测量元件构成的视觉里程计,现已停产。飞机上装了两套双目立体视觉系统,一套向前看,一套向下看,一共是四个相机。两套双目立体视觉系统都参与视觉里程计的计算。通常情况下以向下看的双目立体视觉系统为主,如果向下看的相机对着一些特征不明显的环境(比如纯色的地板、海面等等),感受不到什么图像变化,视觉里程计会自动切换到向前看的立体视觉系统做测量计算。虽然精灵4采用的都是较为成熟的机器视觉技术,但是由于精灵4上机载的计算量非常有限,大疆还是下了相当久的苦功去优化算法,并使用了Movidius公司制作的图像算法处理专用芯片,结合Movidius公司的图像处理算法库优化四路图像处理的性能。前视角度为水平60°,垂直±27°,下视角度为前后70°,左右50°。
两套双目立体视觉系统还带来了视觉里程计之外的两个好处:1.向下看的一套双目立体视觉系统可以探测下方地面上物体的三维位置,从而知道地面的距离;2.向前看的一套双目立体视觉系统可以用来探测前方场景中物体的深度,产生深度图进行障碍感知。深度图还可

小觅MYNT EYE
作为基于视觉识别技术的3D传感器,小觅双目摄像头深度版可适用于室内外双重环境。无惧室外强光环境,完全黑暗的室内环境亦可工作。小觅双目摄像头深度版(MYNT EYE Depth)可广泛应用于视觉定位导航(vSLAM)领域,包括:无人车和机器人的视觉实时定位导航系统、无人机视觉定位系统、无人驾驶避障导航系统、增强现实(AR)、虚拟现实(VR)等;双目也可应用于视觉识别领域,包括:立体人脸识别、三维物体识别、空间运动追踪、三维手势与体感识别等;应用于测量领域,包括:辅助驾驶系统(ADAS)、双目体积计算、工业视觉筛检等。
小觅双目摄像头深度版(50°镜头)产品规格型号为:D1000-50/Color。内置深度计算芯片,无需上位机直接输出深度,同时搭载全局快门,并能实现芯片级双目帧同步,可输出720p/60fps深度图像,深度误差最高可达毫米级。同时,内置六轴IMU传感器和IR主动光探测器(120°版本)。

分辨率:2560×720、1280×480,深度分辨率:On chip1280×720、640×480,帧率:60FPS,深度工作距离:0.49m-10m,运行温度:-10°C55°C,储存温度:-15°C70°C。不过小觅智能公司现在已经搜索不到其官网,网络上传言已经倒闭,淘宝、天猫也无相应产品。
人加智视Human+
人加智视,基于对人类双眼环境感知原理的研究,研发被动式双目立体视觉技术,实现对自然环境的三维还原。
其双目相机司眸PSP010-800,属于工业级双目深度相机,采用自主研发的RSV-P 3D视觉技术,为室外自主移动机器人提供稳定实时的深度感知能力,可用于障碍检测和三维重建等。司眸PSP010-800的最大特点在于其克服了传统双目匹配算法对于复杂运算系统(如CPU、GPU)的依赖,在单片低成本FPGA上实现了从图像输入到视差图输出的所有过程,无需依赖其他运算和存储设备,因此具备小成本、低功耗的优势。其FPGA部分实现了双目矫正和匹配算法,帧率很高,体积小巧。此外,司眸PSP010-800采用16cm的长基线,探测距离可达30m,内置障碍检测算法,障碍信息可通过UART输出。

该相机基线为16cm,输出帧率为25FPS,分辨率1280*800,可分别输出8位的左图、右图灰度图,并可以输出16位视差灰度图(支持转成深度图和点云图)。测量距离为1m-30m,视场角为70°H×50°V,采用USB3.0接口,物理尺寸为198mmL×42.5mmW×45.2mmH。
图漾科技
图漾科技是一家3D计算机视觉设备及技术方案的供应商,其核心产品就是基于“双目摄像头+结构光”的3D工业相机,精度最高在1mm。
图漾三维智能相机采用独立知识产权的主动双目视觉技术,获取比传统双目视觉更多的景深细节和更强的环境适应性。获取到的数据信息,可帮助机器人、工业、商业和消费等多个领域实现智能化。PM801系列采用铝合金材质的机身,结构坚固,能够适用于各种严苛的工业使用场景。

图漾的视觉传感器包括双目红外摄像头、彩色摄像头和结构光投射器,采用自主知识产权的主动双目技术,能够获得比传统双目视觉更多的,景深细节,具有比单目结构光更强的环境光抗干扰能力,并能够在主动双目和被动双目模式下自动切换。
该相机物理尺寸为385mmL×82mmW×89.6mmH,基线长度300mm,测距范围为0.84m-4.3m,测量精度为0.05%-0.2%,可以输出点云图、深度图、IR图以及RGB图,深度图支持1280x960@1fps、640x480@1fps、320x240@1fps,彩色图支持2592x1944@11fps、1280x960@16fps、640x480@25fps,并且支持RGB-D同步对齐。
INDEMIND双目视觉惯性模组
INDEMIND是一家拥有自研机器人全栈AI技术的机器人AI技术供应商,立足于机器人产业链最上游,为整个机器人行业提供通用的、可靠的、低成本的机器人AI技术。
双目视觉惯性模组采用“双目摄像头+IMU”多传感器融合架构与微秒级时间同步机制,为视觉SLAM研究提供精准稳定数据源;内置自研高精度Vi-SLAM算法,以满足SLAM研究、智能机器人、无人机避障、室内外导航定位等使用需求。
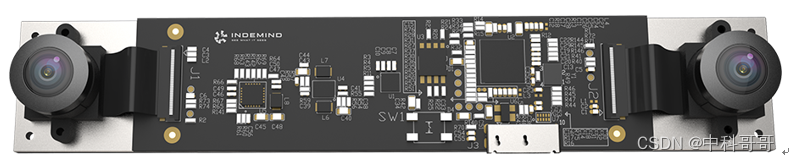
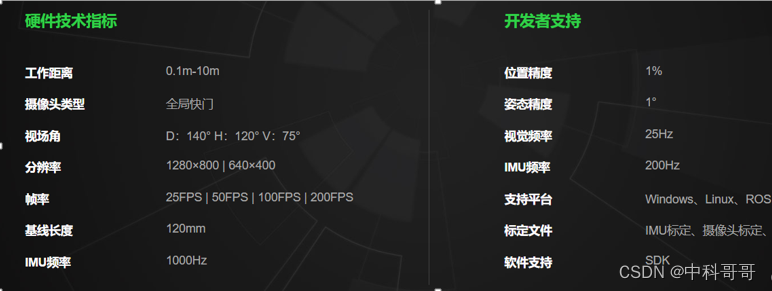
INDEMIND双目惯性模组是业内首款支持200FPS图像获取的双目惯性相机,可在高速机动下精准获取图像及IMU数据,满足开发者高速采集需求,极大降低相应算法追踪难度,并可满足高速SLAM算法(如车载)的定位和建图数据需求。
模组运用摄像头+IMU多传感器融合架构,使摄像头与IMU传感器优势互补,实现位姿精度更高、环境适应性更强、动态性能更稳定、成本更低的双目立体视觉硬件方案。采用全局快门的高清摄像头,可提供水平120°、垂向75°范围内1280×800@25/50/100FPS、640×400@25/50/100/200FPS图像数据,可有效降低运动图像拍摄下的图像畸变,为SLAM算法提供强有力前端数据采集能力。内置6轴IMU传感器,最高运行频率1000Hz,可精准测量载体运动特性,高频率刷新载体位姿信息,快速建立对周围环境的三维立体感知。