开课时间:1月18日~1月21日(周四--周日)
培训地点:北京
目前无人飞行器技术的迅速发展,使得其广泛应用于物流,监测,航拍,农业等众多领域。各大无人飞行器公司产品发布会几乎每月一场,各种新技术,新产品批量上市,技术迭代的日新月异,乐趣无穷的背后是否也想一展身手。悟以往,阿木实验室举办的PX4平台多旋翼无人机技术培训班在全国各地举办,为个人无人时代奠定了良好的开端。各级视频教程的开放,受到众多开发者的拥护,热诚的求知态度受到广大高校,企业的欢迎和好评。
旋翼飞行器的发展可谓突飞猛进,但固定翼特有的优势,却是旋翼望尘而莫叹。固定翼在航程和运输能力上的突出,像顺丰,京东等今年发布的中大型物流固定翼无人机,都预示着固定翼无人机将在物流等部分细分领域有着极大的推广与应用价值。
▼▼▼
鉴于固定翼无人机在行业中的影响地位和应用潜力,阿木实验室特举办固定翼无人机的技术培训班。仍是PX4构架,但固定翼和多旋翼在控制和原理上却有本质的不同,位置控制和姿态控制显著差异。我们特别针对固定翼的特点来讲述该类型的无人机控制理论和方式方法。展翅翱翔,一起收获知识和梦想。
培训时间:2018年1月18日-21日(周四-周日)
18日下午签到。19日早上9点开始授课。
培训地点:北京(具体地址,开课前一周内在微信群内告知)
课程咨询及报名:请微信扫描二维码联系郑老师,拉您进咨询群

PX4固定翼课程大纲简介
PIXHAWK系统介绍:简述APM、PX4、PIXHAWK之间的历史变迁关系,以及平台间优势和劣势的比较。
系统架构概述:概述PX4源码组织结构,让大家从整体对PX4有所感知,了解每个文件的作用。
系统编译过程:讲述系统从上电开始所执行的动作,如何由单片机的启动过渡到操作系统,过渡到应用程序,最后执行启动脚本。
启动过程描述:简述启动过程中mavlink的启动、sensor的启动、算法的启动等,加深对系统的理解,铺垫二次开发。
进程机制uORB:uORB是PX4系统中进程间通信(IPC)的一种机制,在PX4系统掌管着系统中所有的信息流,通过实例教授大家如何使用uORB打通进程间通信。
串级PID简介:PID是一种简单而又极美的控制算法,系统中的控制过程使用PID了,而且是串级过程。
系统参数介绍:对系统级别关键参数进行解释说明,如安全开关,解算带速,USB的链接检查,日志模式,机架类型等。
功能模块整体介绍:高屋建瓴的介绍飞控整体数据流的执行过程,以及模块间的相互关系,对飞行控制有个系统的认识和整体的把握。
多冗余设计:介绍系统冗余设计的概念,多传感器的冗余设计,主副处理器的协同工作,源码分析多传感器的选择机制。
Commander决策分析:飞行模式的决策部分,结合源码学习模式切换的后退机制和故障保护策略,了解commander是如何影响姿态和位置的控制过程。
Navigator之takeoff:梳理navigator,模块的功能作用,分析数据的处理流程,结合源码学习takeoff的执行过程。
Navigator之land:分析数据处理流程,结合源码学习navigator中land的执行过程。
Navigator之loiter:分析数据处理流程,结合源码学习navigator中loiter的执行过程。
Navigator之missition:分析数据处理流程,结合源码学习navigator中missition的执行过程。
姿态解算:简述EKF基础知识,阐述EKF2融合多传感器解算姿态的过程,结合源码分析解算过程,说明注意事项。
位置解算:简述位置坐标系间的转换关系,梳理EKF2中位置估计的过程,结合源码理解算法的实现。
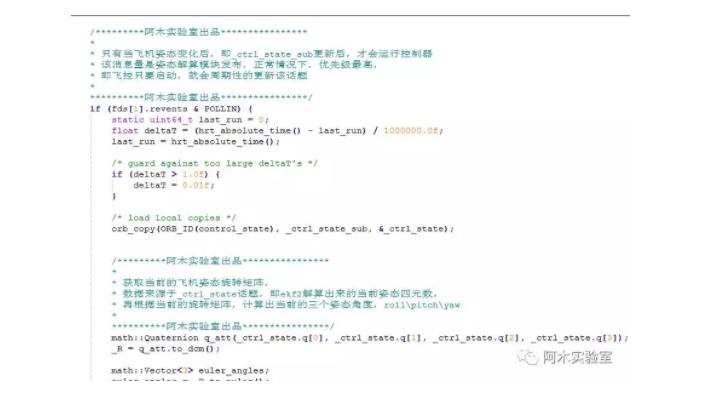
姿态控制:梳理PX4中固定翼姿态控制的实现流程,讲述手动或自动下姿态控制响应的不同,补充欧拉角速度和机体角速度之间的区别,结合源码学习姿态控制算法实现的过程。
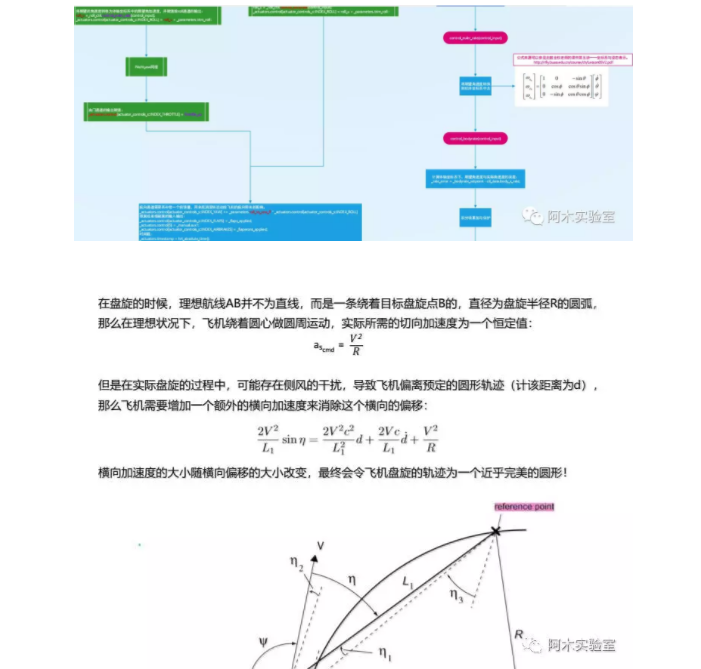
L1控制:讲述制导算法基础知识以及在固定翼位置控制中的应用和源码的实现。
TECS算法:简述总能量控制算法的理论依据,以及在固定翼中的应用和源码实现。
位置控制:阐述固定翼源码中位置控制的实现过程,手动模式的下位置控制、定高模式下的位置控制、定点模式下的位置控制的不同实现过程。
AUTO模式:讲述固定翼位置控制源码中部分AUTO的控制实现,如takeoff在位置控制中的多情况分类处理,以及land的复杂逻辑。
自定义信息流:利用uorb创建新的msg,铺垫功能的二次开发。
NSH调试:简述NSH的调试过程,分析进程的运行频率。
Log日志分析:简述系统中两种Logger的不同,以及初步分析的简介。
Mixer实践:阐述Mixer脚本的定义以及PWM输出配置。


对于核心代码我们都详细梳理了流程图和代码注解。阿木实验室我们做有价值的事情!可以说这是国内最详尽的代码注解和流程图还有涉及到的理论和公式,都在本次的培训中有所体现。
阿木实验室成立于2015年11月,致力于无人机的研发技术服务和建立无人机开发技术社区。2016年开始我们在深圳,北京,武汉,成都,上海,西安举办了将近20场的无人机研发培训班,与北航,西工大,南航,中国空气动力研究所建立了技术培训和业务联系。累计培训无人机研发人员500人次,为推动无人机的技术发展做出了一定的贡献。最近举办的无人机开发线上视频教程众筹活动,圆满成功,助力开发者150人次。帮助企业完成项目10余个!在无人机研发领域已经形成一定的影响力!
我们致力于为研发人员提供高效便捷的技术服务和开发工具,推动技术的进步!
我们还提供如下产品和研发工具(欢迎咨询):

开发工具:PX4构架基于Keil的单步调试
