室内定位系统方案中,UWB定位技术目前应用较多,得益于UWB定位10-30厘米的超高定位精度。目前根据使用场景的不同,UWB TDOA定位系统的定位维度分为以下4种:0维定位(存在性检测)、一维定位、二维定位、三维定位,下面分别介绍下4种定位维度的特征和应用。

一、0维室内定位(存在性检测)
0维室内定位常用于存在性检测,常见的应用场景是长时间监测人员是否在一个房间内,如下图所示,人员消失离开即会报警。

0维室内定位
0维室内定位系统硬件方面通常只需要一个UWB基站和UWB标签即可实现,UWB标签和基站之间相互通信,再通过和后台的交互实现人员的存在性监测、报警等功能。
二、一维定位
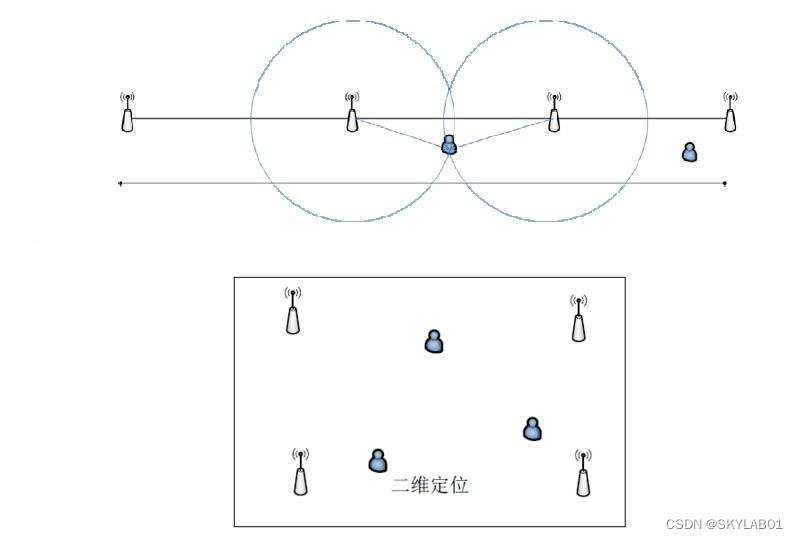
UWB定位的一维定位的典型应用场景是巷道、管廊、隧道等狭长定位区域的人员、物品、车辆定位,只需要定位目标在这个巷道的实时相对位置,如下图所示。由于宽度不大,在做室内定位的时候一般会忽略巷道的宽度。

一维定位
一维定位中,通常需要多个UWB基站按照隧道走向来部署,也要考虑隧道拐角,在拐角处要多部署UWB基站,确保无死角覆盖。
在这种模式下,可以采用UWB基站时间同步的方式实现一维定位。
三、二维定位
UWB定位系统中的二维定位即是二维平面定位,需要确定在空间平面的X、Y 坐标。此种定位一般分以下两种情况。
1 类似于道路的伪二维定位
和一维定位类似,但采用UWB测距的方式来实现目标定位功能。通过标签离UWB基站的距离,计算标签的位置。由于定位场景的特殊性,可以计算出UWB标签的最终位置。
2 标准的二维定位
通过3个以上的UWB基站,在一个标准的二维平面内确定UWB标签的实时位置。可以测得UWB标签的实时二维坐标。
3 含有“垂直投影”的二维定位
在二维定位的UWB定位系统中,由于只有两个维度的坐标,需要关注“垂直投影”带来的误差。如下图所示:
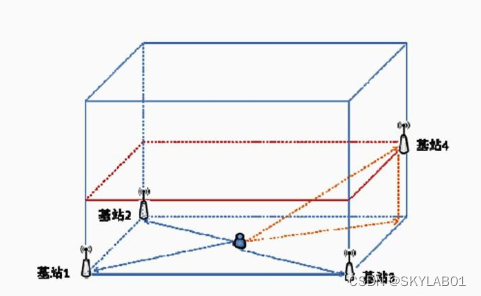
含有“垂直投影”的二维定位
上图中UWB基站4 和其他基站不在同一个平面上,若做测距,得到的是UWB标签和基站4的斜边的距离,需要通过投影到平面的原理在定位算法上进行计算补偿。
四、三维定位
使用UWB定位系统对目标做三维定位,需要求出被定位目标的XYZ三维坐标,如下图所示。
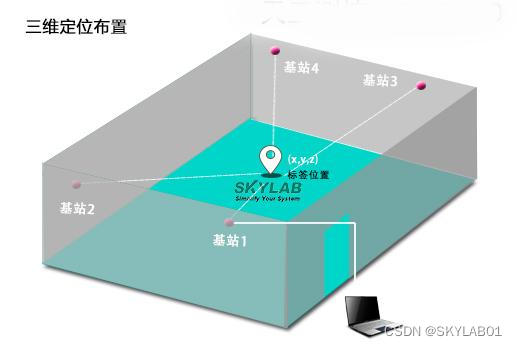
三维定位
基站部署:在UWB基站架设的时候,需要特别拉开Z轴UWB基站的高度差,以确保在Z 轴上的精确度。
基站数量:若用UWB测距的方式来实现定位的话,只需要三个UWB基站就可以完成三维定位;若是采用TDOA定位算法,则必须四个以上基站才能完成目标的三维定位。
以上就是UWB定位的0维、一维、二维和三维定位总结。