模拟时间片轮转算法 1、用到的数据结构 /* PCB */ struct PCB { pid_t pid;//进程 PID int state; //状态信息,1 表示正在运行,0 表示暂停,-1 表示结束 unsigned long runned_time;//已运行时间 unsigned long need_running_time;//剩余运行时间 }; /* PCB集合 */ struct PCB pcb[TOTAL]; //PCB 集合 2、算法思路 算法实现分主函数(main)和分派函数(Dispatch)。 (1)其中主函数(main)的核心功能为: 实现 6 个子进程的创建和子进程 PCB 的初始化。对子进程 PCB 初始化时,状态设为 0,运 行时间由随机数产生。子进程创建后,就通过信号 SIGSTOP 让它处于暂停状态,当被分派 函数(Dispatch)选中后,才能继续执行,输出子进程 x 正在执行的信息。 同时要在主程序里设置定时器,定时器的时间间隔为时间片长度,时间片到,就调用分派函 数(Dispatch)重新选派程序。 (2)分派函数的核心功能: 将正在执行的子进程暂停,状态变为 0,修改已运行时间和剩余运行时间。 如果该子进程剩余时间小于或等于 0,说明执行完毕,PCB 状态改为-1,结束该子进程。 重新选择下一个子进程,状态变为 1,输出该子进程的已运行时间和剩余运行时间,让该子 进程恢复运行。 当所有子进程都结束后,则父程序结束
相关代码:
#include <stdio.h>
#include <stdlib.h>
#include <unistd.h>
#include <sys/types.h>
#include <signal.h>
#include <sys/time.h>
#define CHILD_NUM 6 // 子进程个数
#define TIME_SLICE 5 // 时间片长度(秒)
struct PCB
{
pid_t pid; // 进程ID
int state; // 状态,1表示正在运行,0表示暂停,-1表示结束
unsigned long runned_time; // 已运行时间
unsigned long need_running_time; // 剩余运行时间
};
// PCB集合
struct PCB pcb[CHILD_NUM];
// 定时器
struct itimerval timer;
// 定义当前运行的子进程编号
int i = 0;
// 分派函数
void Dispatch()
{
// 暂停当前正在运行的子进程
kill(pcb[i].pid, SIGSTOP);
// 更新该子进程的运行时间和剩余时间
pcb[i].runned_time += TIME_SLICE;
pcb[i].need_running_time -= TIME_SLICE;
if (pcb[i].need_running_time <= 0)
{
// 如果该子进程的剩余时间小于等于0,说明该子进程已经执行完毕
// 更新PCB状态为-1并结束该子进程
pcb[i].state = -1;
kill(pcb[i].pid, SIGKILL);
}
// 重新选择下一个子进程
int next_child = (i + 1) % CHILD_NUM;
while (pcb[next_child].state == -1)
{
// 如果该子进程已经结束,就选择下一个子进程
next_child = (next_child + 1) % CHILD_NUM;
}
// 更新下一个子进程的PCB状态为1,输出该子进程的运行时间和剩余时间,并使该子进程恢复运行
pcb[next_child].state = 1;
printf("子进程 %d 正在运行, 运行时间 = %ld, 剩余运行时间 = %ld\n", pcb[next_child].pid, pcb[next_child].runned_time, pcb[next_child].need_running_time);
kill(pcb[next_child].pid, SIGCONT);
// 更新i为下一个子进程的下标
i = next_child;
}
// 信号处理函数
void SignalHandler(int signo)
{
// 如果收到的信号为SIGALRM,说明时间片到,需要重新选派子进程
if (signo == SIGALRM)
{
Dispatch();
}
}
int main()
{
int i;
// 创建子进程
for (i = 0; i < CHILD_NUM; i++)
{
pcb[i].pid = fork();
if (pcb[i].pid == 0)
{
// 子进程
while (1)
{
pause(); // 子进程一直处于暂停状态,直到被Dispatch函数选中并调用SIGCONT信号
}
}
}
// 对每个子进程的PCB进行初始化
for (i = 0; i < CHILD_NUM; i++)
{
pcb[i].state = 0; // 初始化状态为0(暂停)
pcb[i].runned_time = 0; // 初始化已运行时间为0
pcb[i].need_running_time = rand() % 100 + 1; // 初始化剩余运行时间为1~100之间的随机数
}
// 为每个子进程设置信号处理函数
for (i = 0; i < CHILD_NUM; i++)
{
signal(SIGALRM, SignalHandler);
}
// 设置定时器,时间片到达时触发SIGALRM信号
timer.it_value.tv_sec = TIME_SLICE;
timer.it_value.tv_usec = 0;
timer.it_interval.tv_sec = TIME_SLICE;
timer.it_interval.tv_usec = 0;
setitimer(ITIMER_REAL, &timer, NULL);
// 选择第一个子进程开始运行
i = 0;
pcb[i].state = 1;
printf("子进程 %d 正在运行, 运行时间 = %ld, 剩余运行时间 = %ld\n", pcb[i].pid, pcb[i].runned_time, pcb[i].need_running_time);
kill(pcb[i].pid, SIGCONT);
while (1)
{
// 父进程一直循环检查是否所有的子进程都已经执行完毕
int finished = 1;
for (i = 0; i < CHILD_NUM; i++)
{
if (pcb[i].state != -1)
{
// 如果有任何一个子进程的状态不为-1,说明还有子进程没有执行完毕
finished = 0;
break;
}
}
if (finished)
{
// 如果所有的子进程都已经执行完毕,就结束父进程
break;
}
}
return 0;
}
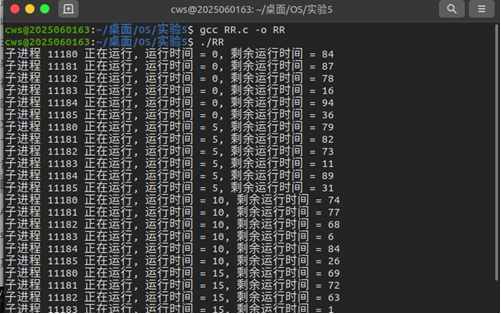
运行结果: