一、简介
这里使用一种简单的方式来计算图像中的像素值直方图分布。计算过程如下所述:
第一种方式:
1、首先将图像变为一维数组(reshape),并将数组中的数值进行排序。
2、基于排序的连续性,统计相同的像素值个数,直到最后一个像素被统计,则计算结束。、
第二种方式:
这种方式可能更简单一些,借用std中的unorder_map数据结构,来完成图像像素值的直方图统计。
二、实现代码
第一种方式:
//标准文件
#include <errno.h>
#include <iostream>
#include <fstream>
#include <queue>
#include <map>
//GDAL
#include "gdal_priv.h"
//Eigen
#include <Eigen/Dense>
typedef Eigen::MatrixXd Matrix;
//图像直方图统计
void HistogramStatistics(const Matrix& images, std::map<double,int>& hists)
{
if (!images.size()) return;
Eigen::VectorXd imgVec = images.reshaped();
size_t imgCount = imgVec.size();
Eigen::VectorXi indices = Eigen::VectorXi::LinSpaced(Eigen::Sequential, imgCount, 0, imgCount);
std::sort(indices.data(), indices.data() + indices.size(), [&imgVec](int i1, int i2)
{
return imgVec[i1] < imgVec[i2]; });
int label = 0;
float curVal = imgVec(indices(0));
hists[curVal] = 1;
for (int i = 1; i < indices.size(); ++i)
{
if (imgVec(indices(i)) == curVal)
{
hists[curVal]++;
continue;
}
else
{
curVal = imgVec(indices(i));
hists[curVal] = 1;
}
}
}
int main(int argc, const char* argv[])
{
//--------------------------------获取数据集-----------------------------
std::cout << "--------------------------------获取数据集-----------------------------" << std::endl;
if (argc != 2) {
return EINVAL;
}
//它可能是一个URL,一个文件名等存储事物,它依赖于驱动程序
const char* pszFilename = argv[1];
GDALDatasetUniquePtr poDataset; //该指针已经包含GDALClose函数
GDALAllRegister();
const GDALAccess eAccess = GA_ReadOnly;
//如果GDALOpen()返回NULL,则意味着打开失败,并且已经通过CPLError()发出了错误消息。
poDataset = GDALDatasetUniquePtr(GDALDataset::FromHandle(GDALOpen(pszFilename, eAccess)));
if (!poDataset)
{
std::cerr << "read failure!!!" << std::endl;
//GDALClose((GDALDatasetH)poDataset.get());
return -1;
}
std::cout << "read successfully!!!" << std::endl;
//--------------------------------获取栅格数据-----------------------------
std::cout << "--------------------------------获取栅格数据-----------------------------" << std::endl;
//第一种方式
double* pafScanline;
GDALRasterBand* poBand;
poBand = poDataset->GetRasterBand(1);
int nXSize = poBand->GetXSize();
int nYSize = poBand->GetYSize();
pafScanline = (double*)CPLMalloc(sizeof(double) * nXSize * nYSize);
poBand->RasterIO(GF_Read, 0, 0, nXSize, nYSize,
pafScanline, nXSize, nYSize, GDT_Float64,
0, 0);
Matrix img(nXSize, nYSize);
for (int i = 0; i < nXSize; ++i) //行
{
for (int j = 0; j < nYSize; ++j) //列
{
int index = i * nXSize + j;
img(i, j) = pafScanline[index];
}
}
CPLFree(pafScanline); //释放缓冲区
std::map<double, int> hists;
HistogramStatistics(img,hists);
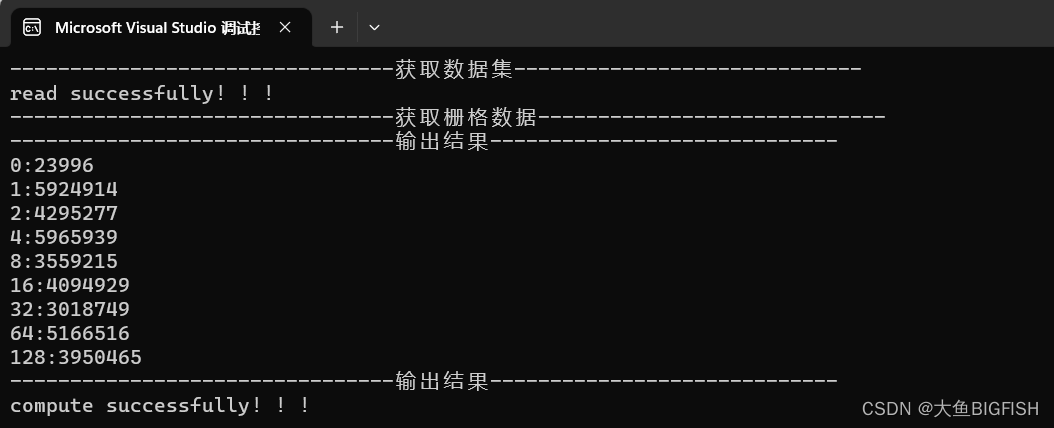
//--------------------------------输出结果-----------------------------
std::cout << "--------------------------------输出结果-----------------------------" << std::endl;
for (auto& it : hists)
{
std::cout << it.first << ":" << it.second << std::endl;
}
std::cout << "--------------------------------输出结果-----------------------------" << std::endl;
std::cout << "compute successfully!!!" << std::endl;
return 0;
}
第二种方式:
//标准文件
#include <errno.h>
#include <iostream>
#include <fstream>
#include <queue>
#include <map>
#include <unordered_map>
//GDAL
#include "gdal_priv.h"
//Eigen
#include <Eigen/Dense>
typedef Eigen::MatrixXd Matrix;
//图像直方图统计
void HistogramStatistics(const Matrix& images, std::map<double,int>& hists)
{
if (!images.size()) return;
Eigen::VectorXd imgVec = images.reshaped();
size_t imgCount = imgVec.size();
Eigen::VectorXi indices = Eigen::VectorXi::LinSpaced(Eigen::Sequential, imgCount, 0, imgCount);
std::sort(indices.data(), indices.data() + indices.size(), [&imgVec](int i1, int i2)
{
return imgVec[i1] < imgVec[i2]; });
int label = 0;
float curVal = imgVec(indices(0));
hists[curVal] = 1;
for (int i = 1; i < indices.size(); ++i)
{
if (imgVec(indices(i)) == curVal)
{
hists[curVal]++;
continue;
}
else
{
curVal = imgVec(indices(i));
hists[curVal] = 1;
}
}
}
int main(int argc, const char* argv[])
{
//--------------------------------获取数据集-----------------------------
std::cout << "--------------------------------获取数据集-----------------------------" << std::endl;
if (argc != 2) {
return EINVAL;
}
//它可能是一个URL,一个文件名等存储事物,它依赖于驱动程序
const char* pszFilename = argv[1];
GDALDatasetUniquePtr poDataset; //该指针已经包含GDALClose函数
GDALAllRegister();
const GDALAccess eAccess = GA_ReadOnly;
//如果GDALOpen()返回NULL,则意味着打开失败,并且已经通过CPLError()发出了错误消息。
poDataset = GDALDatasetUniquePtr(GDALDataset::FromHandle(GDALOpen(pszFilename, eAccess)));
if (!poDataset)
{
std::cerr << "read failure!!!" << std::endl;
//GDALClose((GDALDatasetH)poDataset.get());
return -1;
}
std::cout << "read successfully!!!" << std::endl;
//--------------------------------获取栅格数据-----------------------------
std::cout << "--------------------------------获取栅格数据-----------------------------" << std::endl;
//第一种方式
double* pafScanline;
GDALRasterBand* poBand;
poBand = poDataset->GetRasterBand(1);
int nXSize = poBand->GetXSize();
int nYSize = poBand->GetYSize();
pafScanline = (double*)CPLMalloc(sizeof(double) * nXSize * nYSize);
poBand->RasterIO(GF_Read, 0, 0, nXSize, nYSize,
pafScanline, nXSize, nYSize, GDT_Float64,
0, 0);
std::unordered_map<double, int> hists;
for (int i = 0; i < nXSize; ++i) //行
{
for (int j = 0; j < nYSize; ++j) //列
{
int index = i * nXSize + j;
hists[pafScanline[index]]++;
}
}
CPLFree(pafScanline); //释放缓冲区
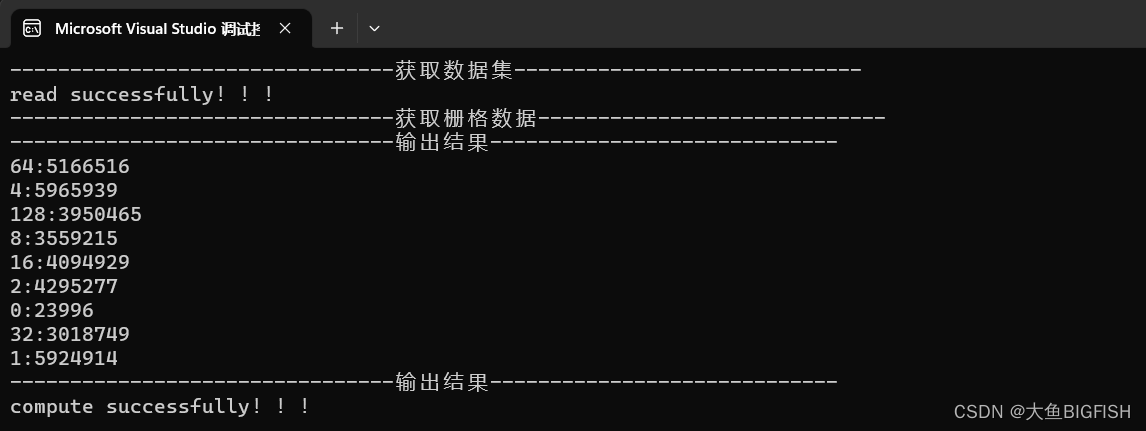
//--------------------------------输出结果-----------------------------
std::cout << "--------------------------------输出结果-----------------------------" << std::endl;
for (auto& it : hists)
{
std::cout << it.first << ":" << it.second << std::endl;
}
std::cout << "--------------------------------输出结果-----------------------------" << std::endl;
std::cout << "compute successfully!!!" << std::endl;
return 0;
}
三、实现效果