目录
信号量广泛用于进程或线程间的同步和互斥,信号量本质上是一个非负的整数计数器,它被
用来控制对公共资源的访问。当信号量值大于 0 时,则可以访问,否则将阻塞。信号量是一种用于控制进程或线程同步和互斥的机制。它通常由一个计数器和一组等待的进程或线程组成。当进程或线程需要访问共享资源时,它会尝试获取一个信号量。如果信号量的计数器大于0,则进程或线程可以获得信号量并继续执行。否则,进程或线程将被阻塞,直到有信号量可用。
PV 原语是对信号量的操作,一次 P 操作使信号量减1,一次 V 操作使信号量加1。
信号量数据类型为:sem_t
1、信号量用于线程的互斥
#include <stdio.h>
#include <pthread.h>
#include <semaphore.h>
#include <unistd.h>
// 定义一个信号量(用于互斥)
sem_t sem;
void my_printf(char *str)
{
int i = 0;
while (str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
}
void *fun1(void *arg)
{
// P 操作
sem_wait(&sem);
my_printf((char *)arg);
// V 操作
sem_post(&sem);
}
void *fun2(void *arg)
{
// P 操作
sem_wait(&sem);
my_printf((char *)arg);
// V 操作
sem_post(&sem);
}
void *fun3(void *arg)
{
// P 操作
sem_wait(&sem);
my_printf((char *)arg);
// V 操作
sem_post(&sem);
}
int main(int argc, char *argv[])
{
// 信号量初始化为1 第二个参数0表示用于线程,第三个信号量初始值
sem_init(&sem, 0, 1);
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, fun1, "this is tid1\n");
pthread_create(&tid2, NULL, fun2, "this is tid2\n");
pthread_create(&tid3, NULL, fun3, "this is tid3\n");
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
//销毁信号量
sem_destroy(&sem);
return 0;
}实现了三个线程的并发输出,但是通过信号量sem保证了只有一个线程在输出时访问标准输出流,即实现了互斥。
定义了一个信号量 sem 用于实现互斥访问。三个线程 tid1、tid2 和 tid3 将同时运行,它们的目标是调用 my_printf 函数打印不同的字符串,但是这些线程之间需要互斥访问共享资源,否则会导致输出的字符串混乱。
在 fun1、fun2 和 fun3 函数中,首先调用 sem_wait 函数来申请信号量资源,表示进入临界区,如果信号量的值为1,则将其减1,表示申请成功,否则阻塞等待。然后调用 my_printf 函数输出相应的字符串,最后调用 sem_post 函数释放信号量资源,将其加1,表示退出临界区,其他线程就可以申请这个资源了。
主函数中,初始化了信号量,创建三个线程,分别调用 fun1、fun2 和 fun3 函数,最后等待三个线程执行结束,销毁信号量。
验证
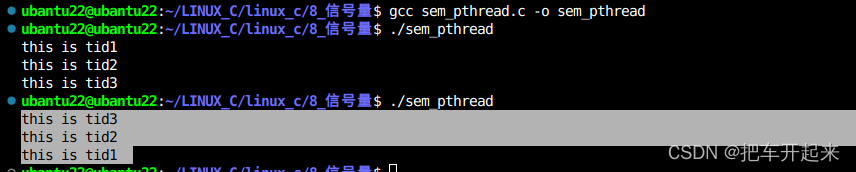
线程的执行顺序是不确定的,由操作系统决定。虽然代码中是先创建tid1线程,但是操作系统可能会优先执行tid3线程,所以最终的执行结果可能是tid3先执行,然后是tid2,最后是tid1。因此,不能依赖代码中的线程创建顺序来确定线程的执行顺序。
2、信号量用于线程的同步
#include <stdio.h>
#include <pthread.h>
#include <semaphore.h>
#include <unistd.h>
// 定义三个信号量(用于同步)
sem_t sem1, sem2, sem3;
void my_printf(char *str)
{
int i = 0;
while (str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
}
void *syn_fun1(void *arg)
{ // p
sem_wait(&sem1);
my_printf((char *)arg);
// v
sem_post(&sem2);
}
void *syn_fun2(void *arg)
{ // p
sem_wait(&sem2);
my_printf((char *)arg);
// v
sem_post(&sem3);
}
void *syn_fun3(void *arg)
{ // p
sem_wait(&sem3);
my_printf((char *)arg);
// v
sem_post(&sem1);
}
int main(int argc, char *argv[])
{
// 信号量初始化为1 第二个参数0表示用于线程
sem_init(&sem1, 0, 1);
sem_init(&sem2, 0, 0);
sem_init(&sem3, 0, 0);
pthread_t tid1, tid2, tid3;
pthread_create(&tid1, NULL, syn_fun1, "this is tid1\n");
pthread_create(&tid2, NULL, syn_fun2, "this is tid2\n");
pthread_create(&tid3, NULL, syn_fun3, "this is tid3\n");
pthread_join(tid1, NULL);
pthread_join(tid2, NULL);
pthread_join(tid3, NULL);
// 销毁信号量
sem_destroy(&sem1);
sem_destroy(&sem2);
sem_destroy(&sem3);
return 0;
}实现了三个线程的同步执行,即按照指定的顺序依次输出三个字符串。其中,使用了三个信号量来实现同步,分别为sem1、sem2、sem3。这三个信号量的初始值分别为1、0、0,表示sem1可以被访问,而sem2和sem3需要等待其他线程的信号才能被访问。三个线程分别对应syn_fun1、syn_fun2、syn_fun3函数,每个函数中都使用了sem_wait和sem_post来对信号量进行操作。其中,sem_wait用于P操作,即尝试获取信号量,如果信号量的值为0,则线程会阻塞等待其他线程的信号;而sem_post用于V操作,即释放信号量,将信号量的值加1,表示其他线程可以访问这个信号量了。最后,在main函数中创建三个线程,并使用pthread_join等待线程结束,最后销毁信号量。
验证

虽然定义了三个信号量,但是初始值为1的信号量只有一个,所以,只有为1的信号量对应的sem1能运行,其他的需要等待信号,也就确保了只有tid1先运行,不会像上面互斥一样随机运行
3、无名信号量用于进程间互斥
无名信号量是一种特殊类型的信号量,它只能被同一进程内的线程使用。它们不需要被命名,因此被称为“无名信号量”。无名信号量通常用于控制线程之间的同步和互斥。在代码示例中,sem_init 函数用于初始化一个无名信号量,而 sem_wait 和 sem_post 函数分别用于等待和释放信号量。
代码一
#include <stdio.h>
#include <semaphore.h>
#include <unistd.h>
#include <sys/mman.h>
void my_printf(char *str)
{
int i = 0;
while (str[i] != '\0')
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
int main(int argc, char *argv[])
{
// 定义一个无名信号量
// MAP_ANONYMOUS匿名映射 ‐1不需要文件描述符
sem_t *sem = mmap(NULL,
sizeof(sem_t),
PROT_READ |
PROT_WRITE,
MAP_SHARED |
MAP_ANONYMOUS,
-1, 0);
// 无名信号量的初始化 第一个1表示进程 第二个1表示初始化值1
sem_init(sem, 1, 1);
pid_t pid = fork();
if (pid == 0) // 子进程
{
// p
sem_wait(sem);
my_printf("child process\n");
// v
sem_post(sem);
}
else if (pid > 0) // 父进程
{
// p
sem_wait(sem);
my_printf("father process\n");
// v
sem_post(sem);
}
sem_destroy(sem);
return 0;
}通过调用mmap函数,将信号量映射到进程的虚拟内存空间中。然后,使用sem_init初始化信号量的值为1,表示当前没有其他进程在访问它。接着,通过调用fork函数创建一个子进程。在父进程中,调用sem_wait函数尝试获得对信号量的访问权。由于这是第一个进程,因此它能够获得对信号量的访问权。它打印一条消息,然后使用sem_post函数释放对信号量的访问权。在子进程中,它也会尝试获得对信号量的访问权,但是由于父进程已经获得了对信号量的访问权,所以子进程必须等待父进程释放对信号量的访问权。然后它打印一条消息,再次使用sem_post函数释放对信号量的访问权。最后,调用sem_destroy函数销毁信号量并释放资源。
mmap是一个系统调用,用于将一个文件或设备映射到内存中。在上面的代码中,它的作用是为共享内存分配一块内存区域,返回的是指向这个区域的指针。mmap函数的调用参数解释如下:
- NULL:表示分配内存区域的起始地址,由系统自动分配
- sizeof(sem_t):表示需要分配的内存区域的大小
- PROT_READ | PROT_WRITE:表示内存区域的访问权限,这里是可读可写
- MAP_SHARED:表示这块内存区域是被多个进程共享的,使用了
MAP_ANONYMOUS标志来创建一个匿名映射,一个无名的共享内存区域,不需要与文件关联 - fd:表示文件描述符,这里是共享内存的文件描述符,‐1不需要文件描述符
- 0:表示偏移量,这里没有偏移,从文件开头开始映射
- 成功 返回映射区的首地址
代码二
#include <stdio.h>
#include <semaphore.h>
#include <unistd.h>
#include <sys/mman.h>
void my_printf(char *str)
{
int i=0;
while(str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
}
int main(int argc, char *argv[])
{
//定义一个无名信号量
//MAP_ANONYMOUS匿名映射 ‐1不需要文件描述符
sem_t *sem1 = mmap(NULL, sizeof(sem_t),
PROT_READ|PROT_WRITE,
MAP_SHARED | MAP_ANONYMOUS,
-1,0);
sem_t *sem2 = mmap(NULL, sizeof(sem_t),
PROT_READ|PROT_WRITE,
MAP_SHARED | MAP_ANONYMOUS,
-1,0);
//无名信号量的初始化 第一个1表示进程 第二个1表示初始化值1
sem_init(sem1,1,1);
sem_init(sem2,1,0);
pid_t pid =fork();
if(pid ==0)//子进程
{
//p
sem_wait(sem1);
my_printf("this is child process\n");
//v
sem_post(sem2);
}
else if(pid >0)
{
//p
sem_wait(sem2);
my_printf("this is father process\n");
//v
sem_post(sem1);
}
//销毁信号量
sem_destroy(sem1);
sem_destroy(sem2);
return 0;
} 这段代码定义了两个无名信号量sem1和sem2,并使用mmap将它们分别映射到了进程的虚拟内存空间中。然后使用这两个无名信号量实现了进程间的同步。不同于前面那段代码,这段代码使用了两个不同的指针变量sem1和sem2分别指向映射到内存中的两个无名信号量。同时在创建子进程时,子进程通过sem2来等待父进程打开它,父进程通过sem1来等待子进程打开它。这样就实现了进程间的同步。总的来说,这两段代码使用的都是无名信号量来实现进程间同步,只不过一个使用了一个无名信号量,另一个使用了两个无名信号量来实现。
验证

两段代码结果打印的都是相同的信息
4、有名信号量 用于进程间同步和互斥
#include <stdio.h>
#include <semaphore.h>
#include <unistd.h>
#include <fcntl.h>
#include <sys/stat.h>
void my_printf(char *str)
{
int i = 0;
while (str[i] != '\0')
{
printf("%c", str[i++]);
fflush(stdout);
sleep(1);
}
}
int main(int argc, char **argv)
{
// 创建2个有名信号量sem_open 最后一个参数为初始值
sem_t *sem1 = sem_open("sem1", O_RDWR | O_CREAT, 0666, 1);
sem_t *sem2 = sem_open("sem2", O_RDWR | O_CREAT, 0666,0);
// p
sem_wait(sem1);
// 任务
my_printf("this is sem1\n");
// v
sem_post(sem2);
// 任务
my_printf("this is sem2\n");
//p
sem_post(sem1);
// 关闭信号量
sem_close(sem1);
sem_close(sem2);
// 销毁信号量
sem_destroy(sem1);
sem_destroy(sem2);
return 0;
} 进程通过sem_wait(sem1)获取sem1信号量,如果此时sem1的值为1,则将其减1,表示占用资源,否则阻塞等待。进程输出"this is sem1\n",此时其他进程无法获得sem1信号量,从而实现了互斥。进程通过sem_post(sem2)释放sem2信号量,将其值加1,唤醒其他阻塞在sem2上的进程,从而实现了同步。此时其他进程可以获取sem2信号量,进行下一步操作。进程输出"this is sem2\n",其他进程无法获取sem2信号量,从而实现了互斥。
在第二个任务执行完毕之后,调用sem_post(sem1)将sem1的值加一,此时又可以重新进入第一个任务。这种方式可以保证第一个任务和第二个任务的执行顺序,并且在第二个任务执行完毕之前第一个任务不会被重新执行。同时,由于sem1的初始值为1,保证了只有一个进程可以访问第一个任务的代码,实现了互斥
验证
