前言
需要提前部署好Atlas200DK的合设环境,具体可参考此专栏的第一篇文章
工程源码已开源:https://github.com/Que121/face_detection_camera_uart_arduino
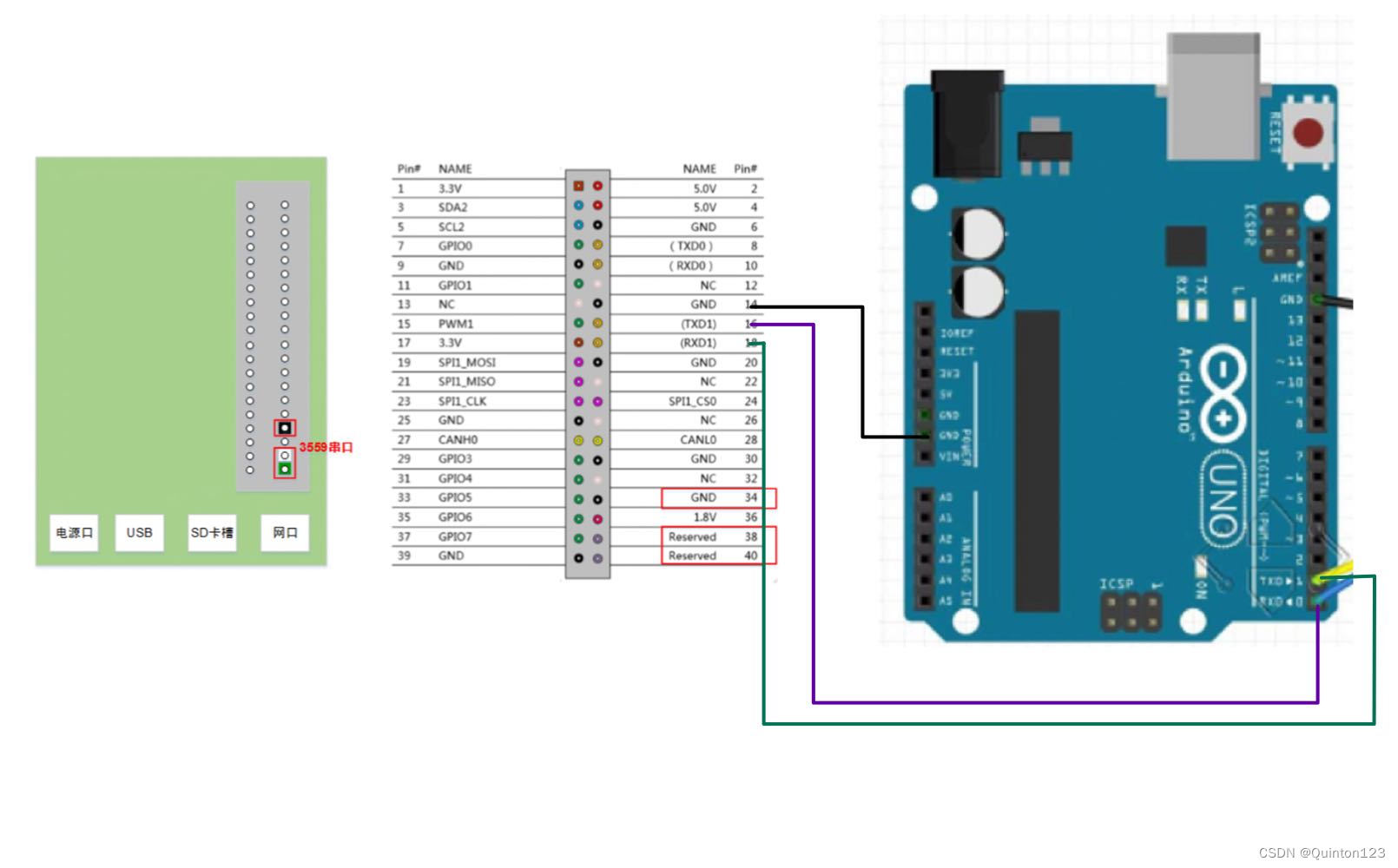
一、连接Atlas200DK与Arduino
按照下图使用杜邦线进行连接,并将Atlas200DK和Arduino都连接PC
二、Atlas200DK串口配置
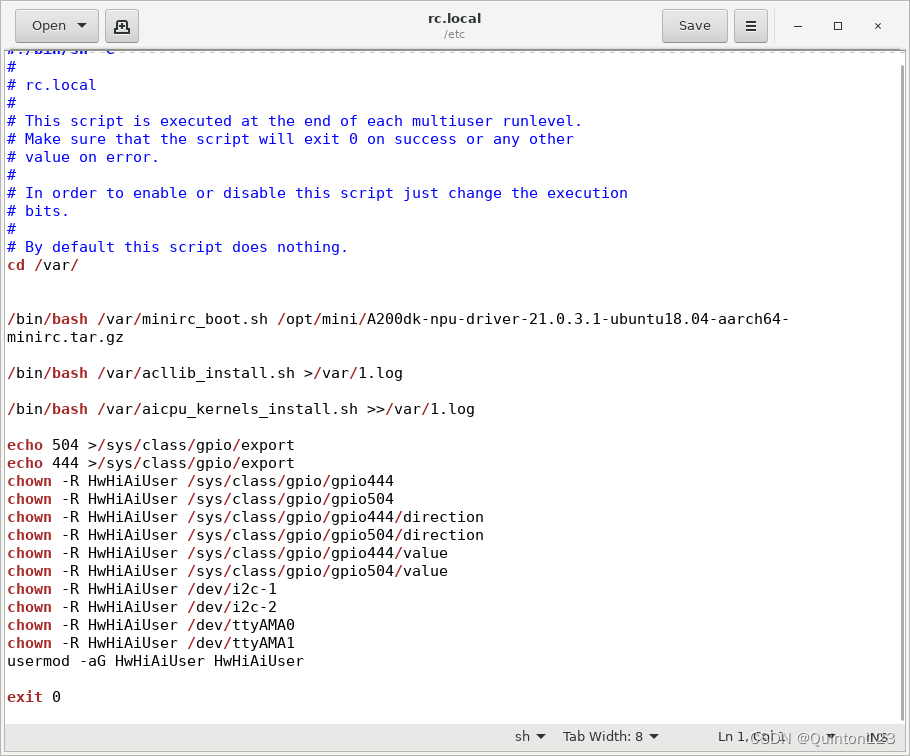
- 设置串口权限
# 以root权限编辑rc.local文件
sudo gedit /etc/rc.local
# 将下列命令加入到exit 0之前
echo 504 >/sys/class/gpio/export
echo 444 >/sys/class/gpio/export
chown -R HwHiAiUser /sys/class/gpio/gpio444
chown -R HwHiAiUser /sys/class/gpio/gpio504
chown -R HwHiAiUser /sys/class/gpio/gpio444/direction
chown -R HwHiAiUser /sys/class/gpio/gpio504/direction
chown -R HwHiAiUser /sys/class/gpio/gpio444/value
chown -R HwHiAiUser /sys/class/gpio/gpio504/value
chown -R HwHiAiUser /dev/i2c-1
chown -R HwHiAiUser /dev/i2c-2
chown -R HwHiAiUser /dev/ttyAMA0
chown -R HwHiAiUser /dev/ttyAMA1
usermod -aG HwHiAiUser HwHiAiUser
- 安装python-periphery库
使用此命令进行安装
pip install python-periphery

三、下载工程代码并运行
- 克隆github工程项目
git clone https://github.com/Que121/face_detection_camera_uart_arduino.git
- face_detection_camera为上位机代码,sketch为下位机代码

1.Arduino下位机部分
- 使用Arduino ide打开ino文件
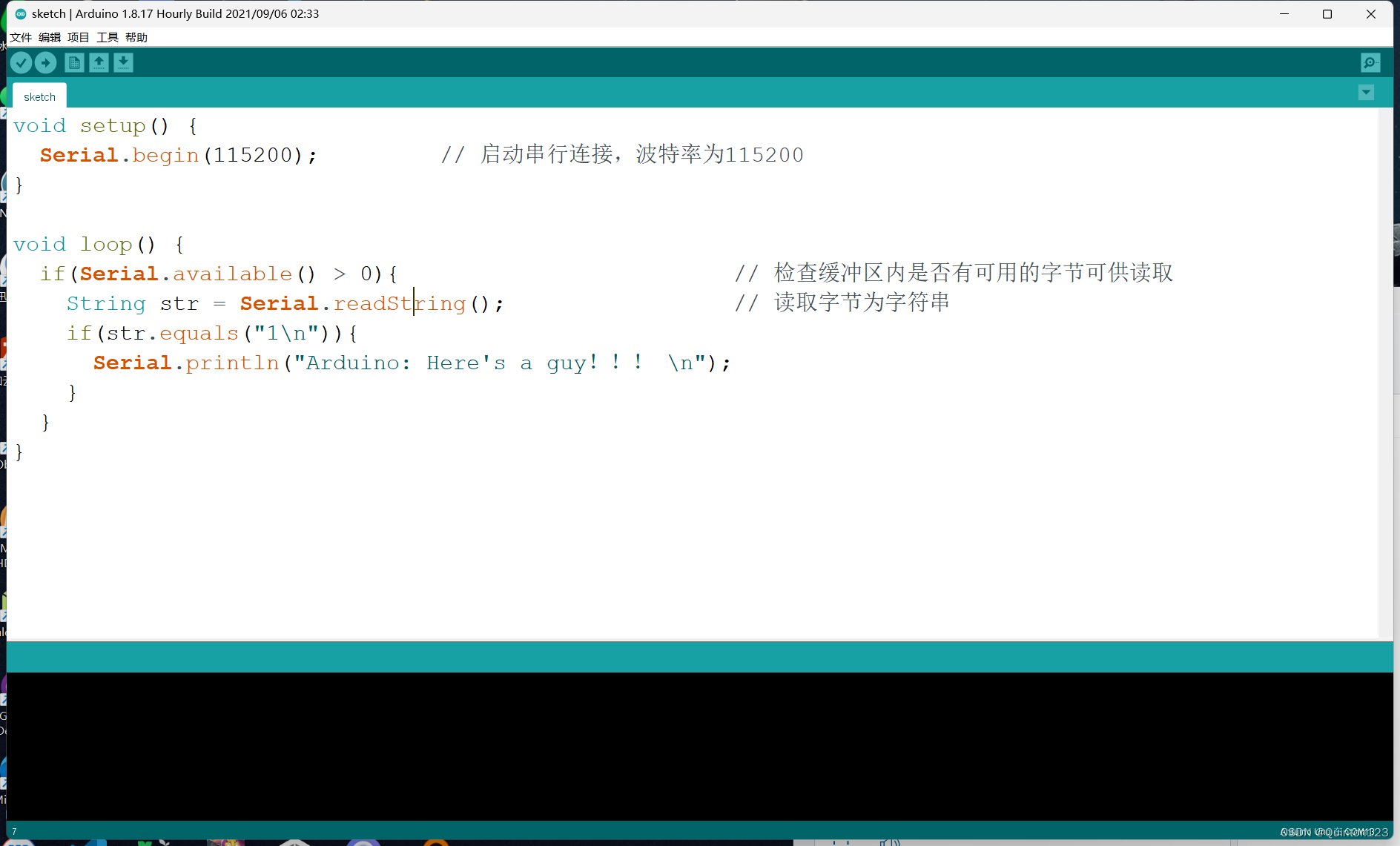
- 选择正确端口后进行烧录

- 打开串口监视器并选择正常的波特率
2.Atlas上位机部分
-
进入 face_detection_camera 文件夹

-
执行scripts文件夹下脚本
bash scripts/sample_run.sh
- 选择一个登录Atlas200DK的端口ip,用于presenter画面

- 进入presenter
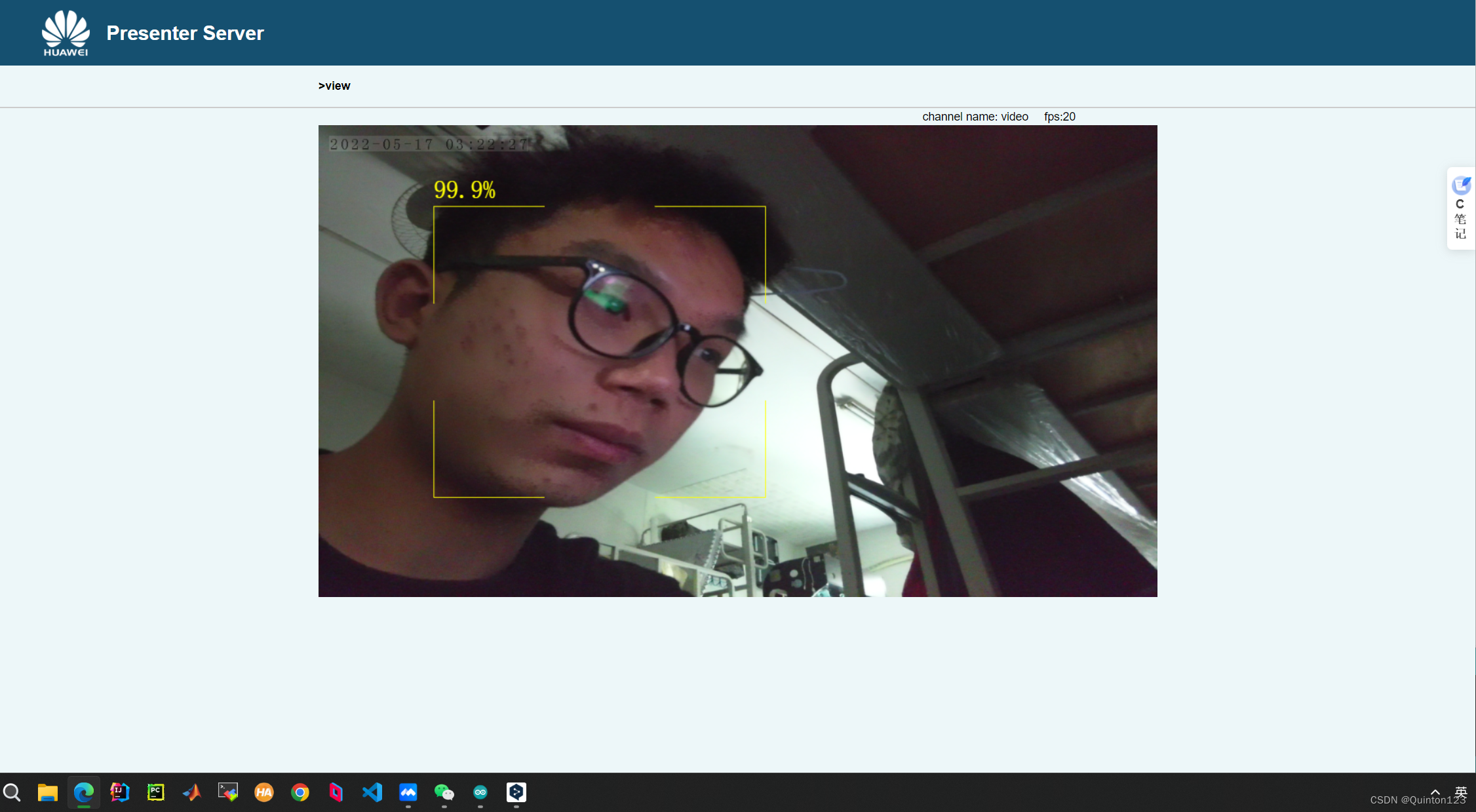
- 观察Atlas终端
