汇川MD500变频器有硬件、软件、调试等说明帮助文档,跟随着这三种资料便可以开始对此款变频器进行学习。
MD500-PLUS用户手册.zip-嵌入式文档类资源-CSDN文库
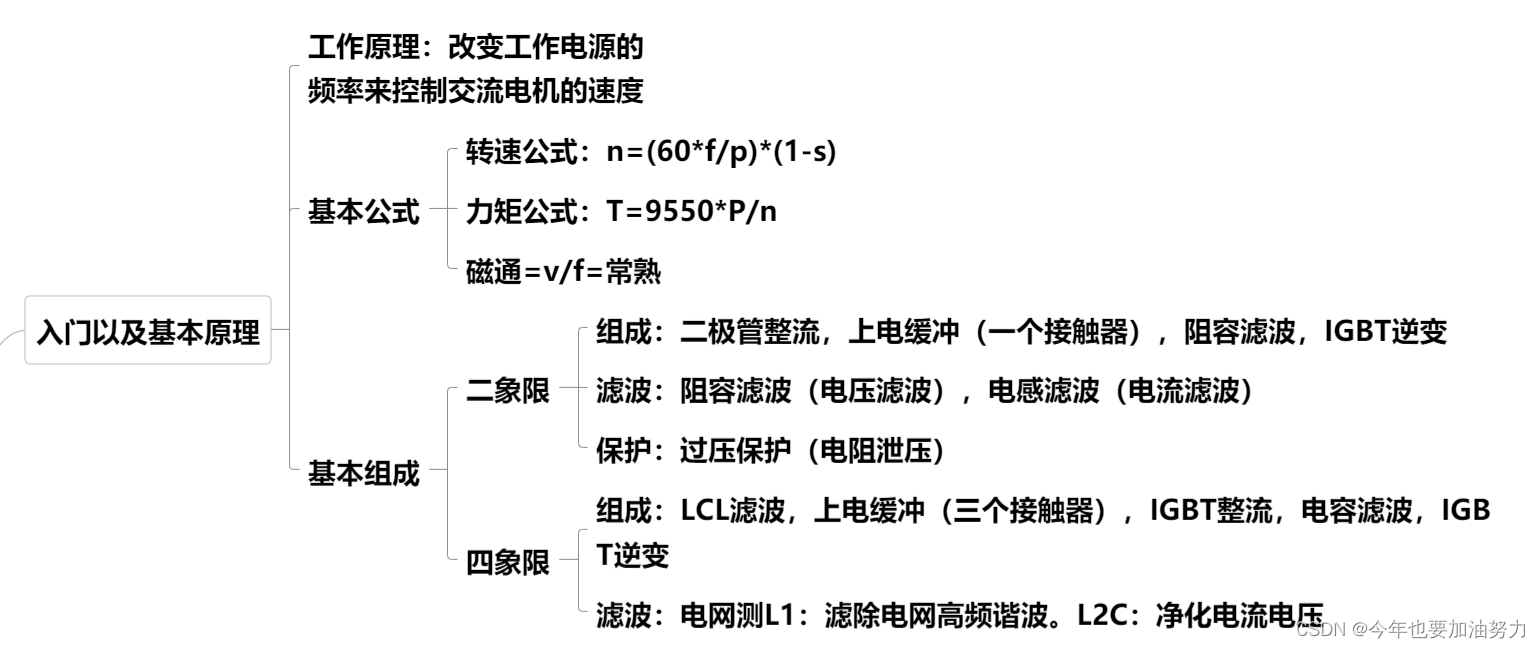
首先记录一下调试手册的学习,了解一下此款变频器的工作原理图以及工作流程。
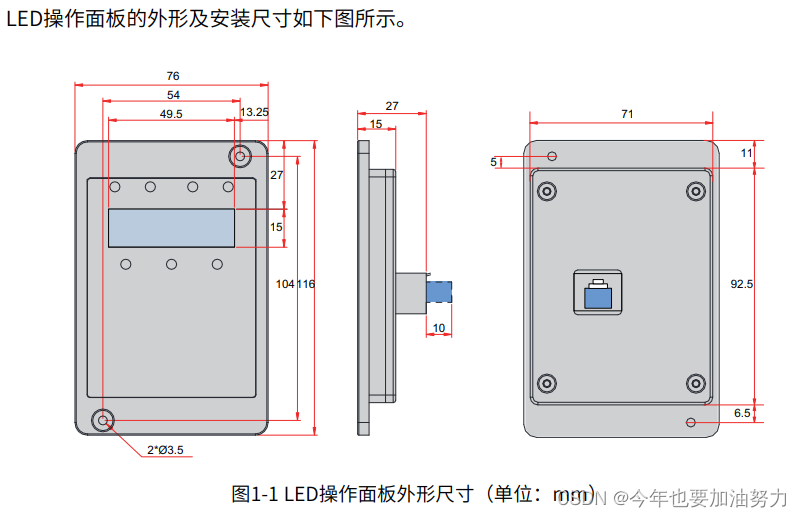
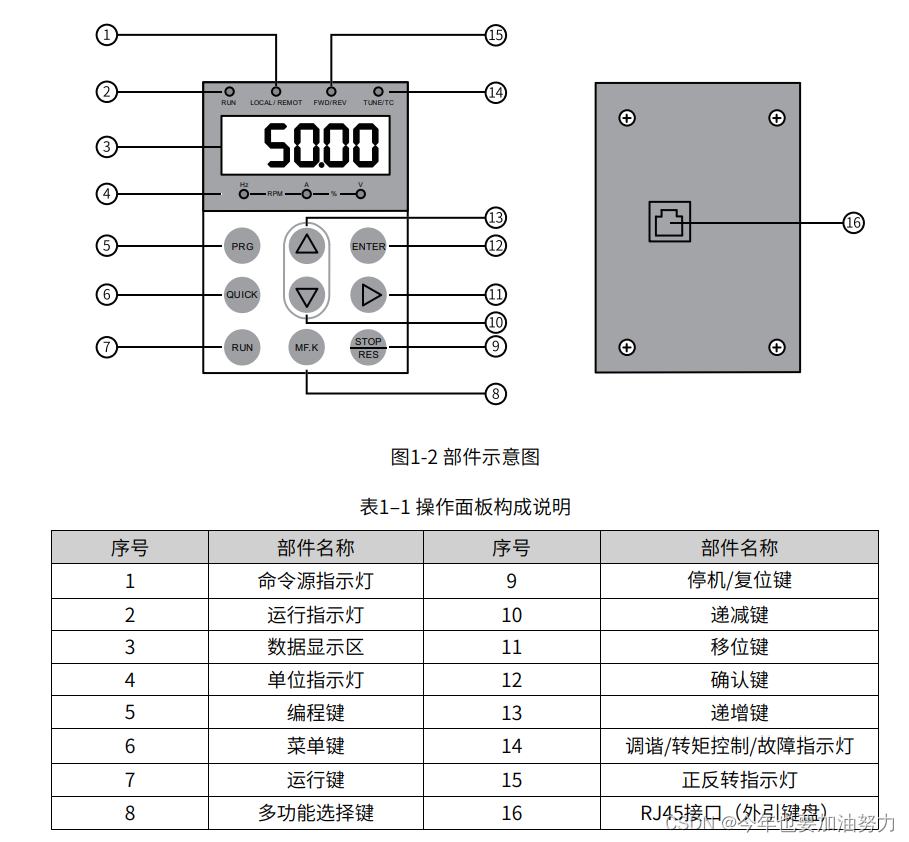
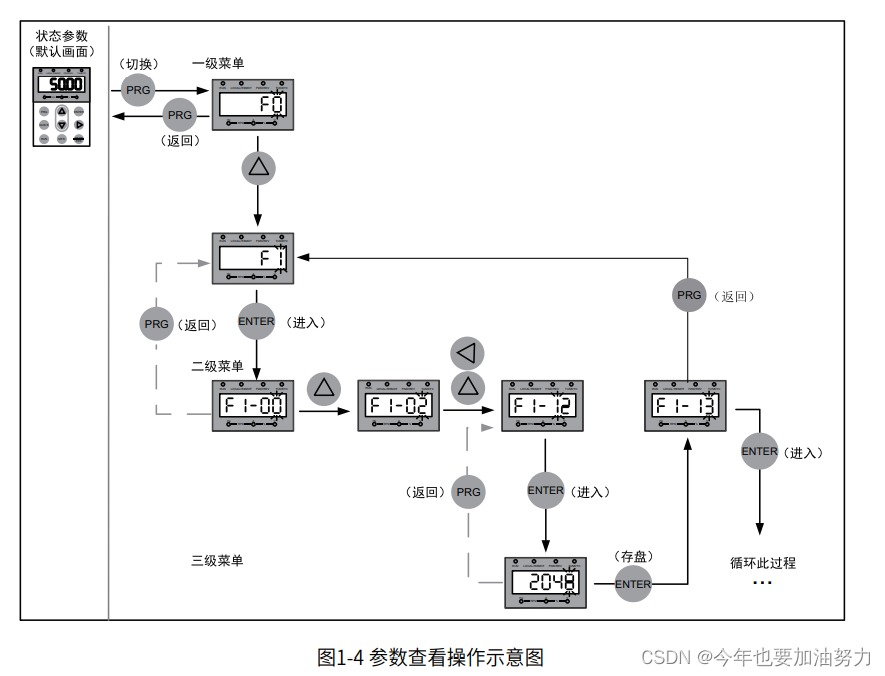
一、LED操作面板
参数查看流程图,注意按下确定保存之后显示的是下一个参数的信息

二、调试与试运行
跟着调试手册的2.1进行每一步的调试操作,注意不要忽略步骤!
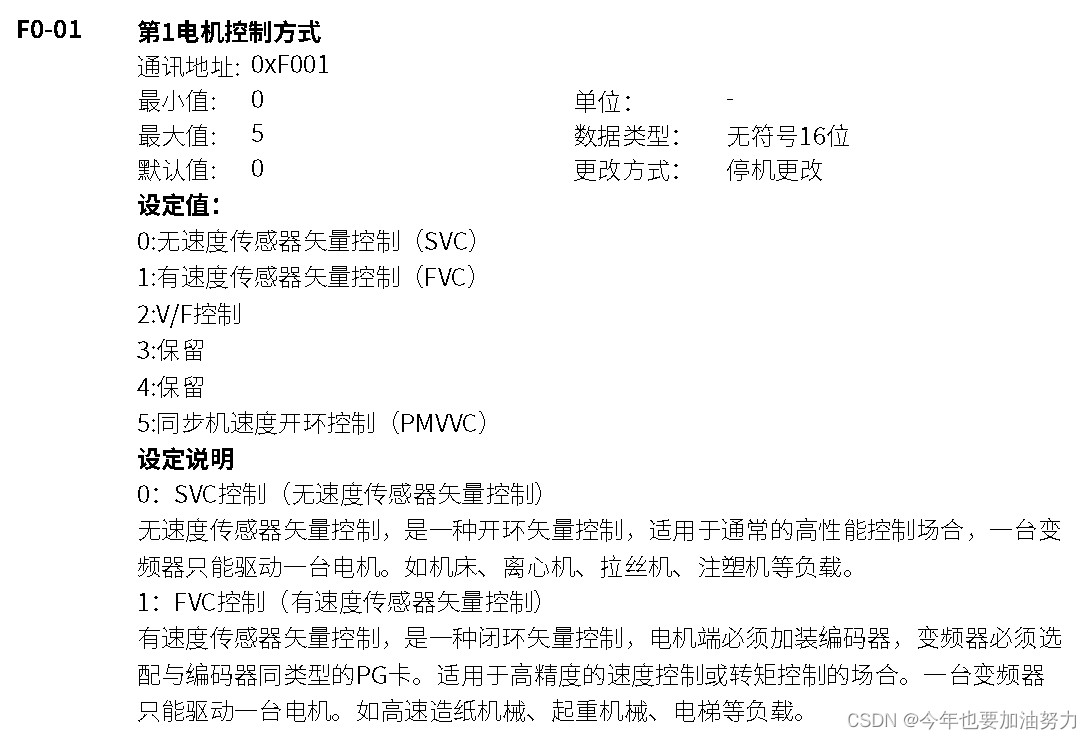
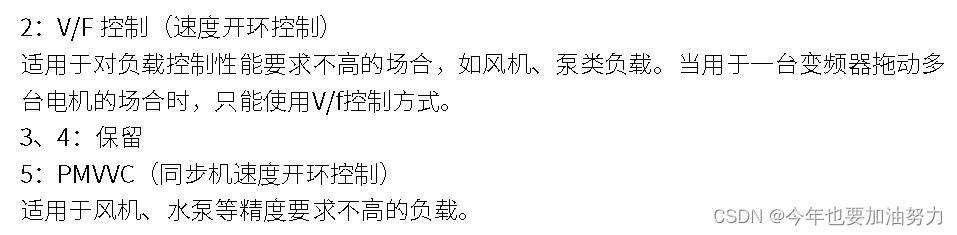
2.1 Vf控制模式调试流程
2.2 SVC&FVC控制模式调试流程
PG,通常用于测量旋转速度。最常见的PG卡,就是光电编码器。 变频器中的PG卡则是矢量变频器的一部分,可将不同输出形式的编码器的信号进行转换、隔离,输出可以适应控制器的信号。
2.3 PMVVC控制模式调试流程

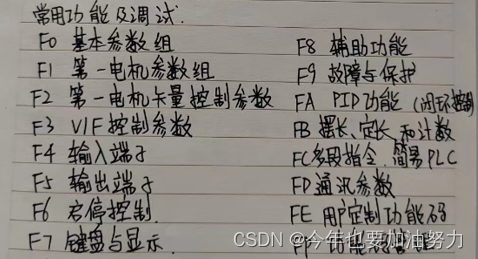
每一步都有着详细的操作和流程图,但是有一些关键词看的不是很明白,下图就解释了这些省略词的含义。
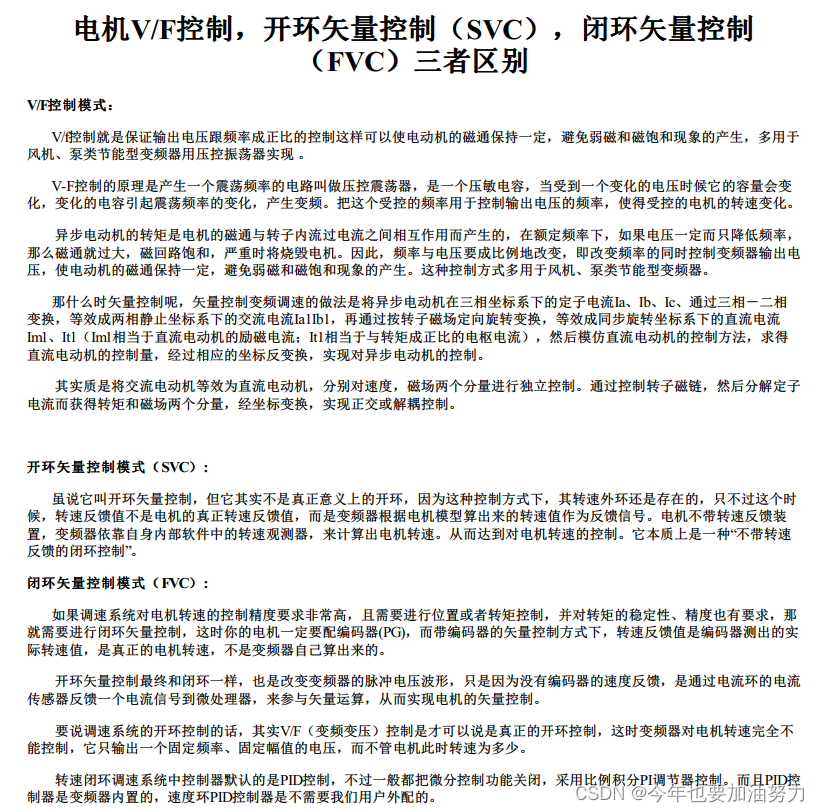
2.4矢量控制
由于异步电机的动态数学模型是一个高阶、非线性、强耦合的多变量系统。上世纪60年代末由达姆斯塔特工业大学(TU Darmstadt)的K.Hasse提出。在70年代初由西门子工程师F.Blaschke在不伦瑞克工业大学(TU Braunschweig)发表的博士论文中提出三相电机磁场定向控制方法,通过异步电机矢量控制理论来解决交流电机转矩控制问题。矢量控制实现的基本原理是通过测量和控制异步电动机定子电流矢量,根据磁场定向原理分别对异步电动机的励磁电流和转矩电流进行控制,从而达到控制异步电动机转矩的目的。
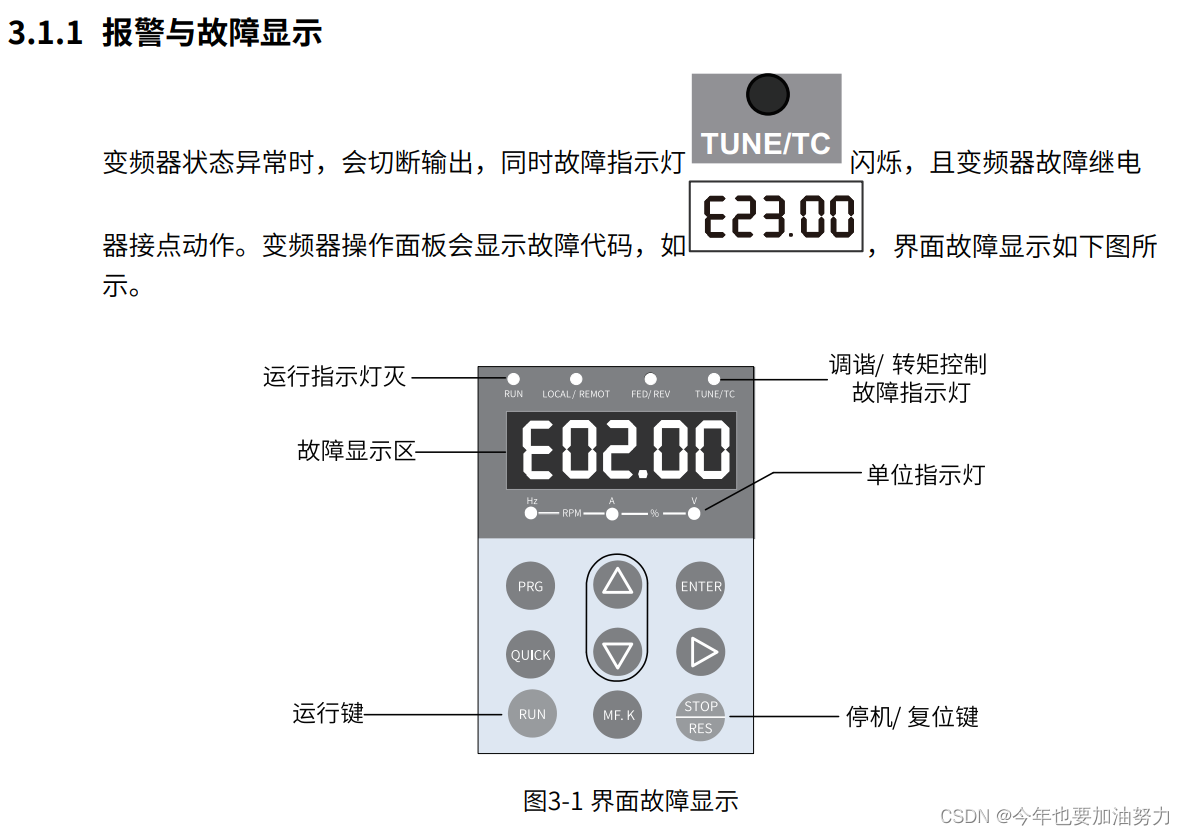
三、故障处理
在出现故障之后,根据故障显示区所显示的故障在手册之中进行查找。
四、PID控制
在汇川变频器之中,运用了PID控制算法,PID算法能称之为完成算法。
PID 实指“比例 proportional”、“积分 integral”、“微分 derivative”,这三项构 成 PID 基本要素。每一项完成不同任务,对系统功能产生不同的影响。它的结构简单,参数易 于调整,是控制系统中经常采用的控制算法。